技术特征:
1.一种用于介入成像规程的方法,所述方法包括:在将医疗设备插入受试者体内期间基于所述插入的实时图像来识别所述医疗设备;基于所述插入的所述实时图像来实时推断所述插入期间的所述医疗设备的轨迹;以及在所述实时图像上显示所述医疗设备的所述推断轨迹。2.根据权利要求1所述的方法,其中在所述实时图像上显示所述医疗设备的所述推断轨迹包括将所述推断轨迹从所述医疗设备的远侧端部延伸为线性或曲线推断。3.根据权利要求1所述的方法,其中基于所述插入的所述实时图像来实时推断所述插入期间的所述医疗设备的所述轨迹包括:定位所述医疗设备的远侧端部;以及基于所述远侧端部的当前位置和所述医疗设备的几何曲率来推断所述医疗设备的所述轨迹。4.根据权利要求3所述的方法,所述方法还包括通过基于所述实时图像中所述医疗设备的可视部分识别所述医疗设备的最佳拟合曲线来确定所述几何曲率,并且其中推断所述医疗设备的所述轨迹还包括将所述最佳拟合曲线延伸超过所述医疗设备的所述远侧端部。5.根据权利要求3所述的方法,其中基于所述医疗设备的已知长度和形状来确定所述医疗设备的所述几何曲率。6.根据权利要求3所述的方法,其中推断所述医疗设备的所述轨迹还基于所述插入的机械模型。7.根据权利要求6所述的方法,其中所述插入的所述机械模型使用所述医疗设备的一个或多个物理属性来估计所述医疗设备在所述插入期间的变形。8.根据权利要求7所述的方法,其中所述一个或多个物理属性包括所述医疗设备的长度、厚度和刚度中的至少一者。9.根据权利要求6所述的方法,其中所述插入的所述机械模型使用在所述插入期间由所述医疗设备穿透的所述受试者的解剖结构的一个或多个物理属性。10.根据权利要求1所述的方法,所述方法还包括:确定所述推断轨迹中的不确定性;将所述不确定性映射到围绕所述推断轨迹的空间区域;以及将所述不确定性在所述实时图像上显示为所述空间区域。11.根据权利要求10所述的方法,其中确定所述推断轨迹中的所述不确定性基于所述医疗设备的几何曲率、所述医疗设备的刚度、所述医疗设备正在穿透的组织和所述介入成像规程的类型中的一者或多者。12.一种用于介入成像的方法,所述方法包括:基于在将医疗设备插入受试者体内之前获取的所述受试者的图像来确定所述插入的期望轨迹;在所述插入期间获取所述受试者的实时图像;在所述插入期间在所述受试者的所述实时图像上显示用于所述插入的所述期望轨迹;实时估计所述医疗设备在所述插入期间的实时轨迹;以及在所述受试者的所述实时图像上显示所述医疗设备的所述实时轨迹。13.根据权利要求12所述的方法,其中实时估计所述医疗设备在所述插入期间的所述
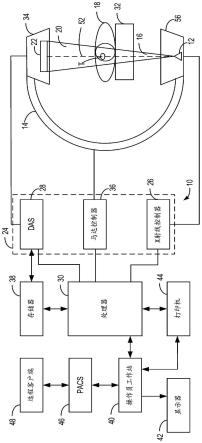
实时轨迹包括:经由分割算法来识别所述实时图像中的所述医疗设备;确定所述医疗设备的远侧端部的位置;确定所述医疗设备的几何曲率;以及基于所述几何曲率和所述远侧端部的所述位置来估计所述医疗设备的所述实时轨迹。14.根据权利要求13所述的方法,其中在所述受试者的所述实时图像上显示所述医疗设备的所述实时轨迹包括将所述实时轨迹延伸超出所述医疗设备的所述远侧端部预定距离。15.根据权利要求13所述的方法,其中估计所述医疗设备的所述实时轨迹还基于所述医疗设备的长度、所述医疗设备的厚度、所述医疗设备的刚度、所述介入成像的规程类型和正被所述医疗设备穿透的解剖特征的刚度中的至少一者。16.根据权利要求12所述的方法,所述方法还包括:基于所述实时轨迹的形状、所述医疗设备的长度、所述医疗设备的厚度、所述医疗设备的刚度、所述介入成像的规程类型和正被所述医疗设备穿透的解剖特征的刚度中的至少一者来估计所述实时轨迹中的不确定性;以及在所述实时图像上显示所述不确定性的视觉表示。17.一种成像系统,所述成像系统包括:辐射源,所述辐射源被配置为朝向受试者投射辐射束;辐射检测器,所述辐射检测器被配置为接收由所述辐射源投射并且由所述受试者撞击的所述辐射束;显示器;和处理器,所述处理器可操作地耦接到存储指令的存储器上,所述指令在被执行时致使所述处理器:经由所述辐射检测器获取正在穿透所述受试者的医疗设备的实时图像;实时分析所述实时图像以识别所述医疗设备并且估计所述医疗设备的实时轨迹;以及经由所述显示器在所述实时图像上实时显示所述实时轨迹。18.根据权利要求17所述的成像系统,其中为了实时分析所述实时图像以识别所述医疗设备并且估计所述医疗设备的所述实时轨迹,所述存储器包括其他指令,所述其他指令在被所述处理器执行时致使所述处理器:经由分割算法来识别所述医疗设备;定位所述医疗设备的远侧端部;以及基于所述远侧端部的当前位置和所述医疗设备的几何模型来估计所述医疗设备的所述实时轨迹。19.根据权利要求18所述的成像系统,其中为了实时分析所述实时图像以估计所述医疗设备的所述实时轨迹,所述存储器包括其他指令,所述其他指令在被所述处理器执行时致使所述处理器:进一步基于所述医疗设备的刚度、厚度和长度中的至少一者来估计所述医疗设备的所述实时轨迹。20.根据权利要求18所述的成像系统,其中所述医疗设备的所述几何模型基于所述医
疗设备的曲率来识别最佳拟合曲线,并且所述存储器包括其他指令,所述其他指令在被所述处理器执行时致使所述处理器:基于所述医疗设备的刚度、厚度和长度中的至少一者来估计所述医疗设备的所述实时轨迹中的不确定性;以及经由所述显示器在所述实时图像上实时显示所述实时轨迹中的所述不确定性。
技术总结
本发明提供了用于医疗成像的各种方法和系统。在一个实施方案中,一种用于介入成像规程的方法包括:在将医疗设备插入受试者体内期间基于该插入的实时图像来识别该医疗设备;基于该插入的该实时图像来实时推断该插入期间的该医疗设备的轨迹;以及在该实时图像上显示该医疗设备的推断轨迹。该医疗设备的推断轨迹。该医疗设备的推断轨迹。
技术研发人员:T
受保护的技术使用者:通用电气精准医疗有限责任公司
技术研发日:2022.07.18
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。