1.本发明涉及一种清洗系统。
背景技术:
2.在现有技术中,氢氧化物清洗是传感器制造业的一个关键工序,特别是医用传感器。通常在制造过程中,氢氧化物作为一种污染物存在于传感器的表面。为了去除附着在传感器的表面上的氢氧化物,在现有技术中,常用一些挥发性和有毒的溶剂来去除。然而,这些方案对环境是有害的,会造成大气污染。
3.此外,在现有技术中,清洗系统的清洗室不完全密封,因为其具有用于输送传感器的输送通道。在清洗过程,清洗室内的气体会经由输送通道外泄,外部灰尘会经由输送通道进入,严重影响清洗效果。
技术实现要素:
4.本发明的目的旨在解决现有技术中存在的上述问题和缺陷的至少一个方面。
5.根据本发明的一个方面,提供一种清洗系统,包括:壳体,具有彼此分隔开的第一腔室和第二腔室;通道,连接在所述第一腔室和所述第二腔室之间;和容器,可移动地设置在所述通道中,用于在所述第一腔室和所述第二腔室之间输送所述产品。在输送所述产品的过程中,所述容器与所述通道之间始终保持密封配合,以防止所述第一腔室与所述第二腔室连通。
6.根据本发明的一个实例性的实施例,所述容器适于在第一位置和第二位置之间移动;当所述容器移动到所述第一位置时,所述容器至少部分进入所述第一腔室中,以将装载在所述容器中的待清洗的产品输送到所述第一腔室中;当所述容器移动到所述第二位置时,所述容器至少部分进入所述第二腔室中,以将装载在所述容器中的已被清洗的产品输送到所述第二腔室中。
7.根据本发明的另一个实例性的实施例,在所述容器的一端上套装有第一弹性密封圈,另一端上套装有第二弹性密封圈;当所述容器移动到所述第一位置时,所述第二弹性密封圈仍位于所述通道中并密封所述通道;当所述容器移动到所述第二位置时,所述第一弹性密封圈仍位于所述通道中并密封所述通道。
8.根据本发明的另一个实例性的实施例,所述容器还适于移动到位于所述第一位置和所述第二位置之间的中间位置;当所述容器移动到所述中间位置时,所述容器全部位于所述通道中,使得所述通道被所述第一弹性密封圈和所述第二弹性密封圈密封。
9.根据本发明的另一个实例性的实施例,所述清洗系统还包括驱动装置,所述驱动装置用于驱动所述容器在所述第一位置和所述第二位置之间移动。
10.根据本发明的另一个实例性的实施例,所述清洗系统还包括:水蒸汽喷射装置,安装在所述第一腔室中,用于向输送到所述第一腔室中的产品喷射高温水蒸汽,以去除所述产品的表面上的污染物。
11.根据本发明的另一个实例性的实施例,所述清洗系统还包括:第一机器人,安装在所述第一腔室中,用于抓取和移动所述产品;和夹具,安装在所述第一腔室中,用于夹持和固定被放置到其上的所述产品。
12.根据本发明的另一个实例性的实施例,所述第一机器人用于从所述容器抓取输送到所述第一腔室中的待清洗的产品和将抓取的待清洗的产品放置到所述夹具上;并且所述第一机器人还用于从所述夹具抓取已被清洗的产品和将抓取的已被清洗的产品放回到所述容器中。
13.根据本发明的另一个实例性的实施例,所述第一机器人还用于抓取所述水蒸汽喷射装置的水蒸汽喷头和沿预定轨迹移动所述水蒸汽喷头,以便对固定在所述夹具上的产品的表面进行清洗。
14.根据本发明的另一个实例性的实施例,所述清洗系统还包括:干燥气体喷射装置,安装在所述第一腔室中,用于向清洗后的产品喷射干燥气体,以使所述产品干燥。
15.根据本发明的另一个实例性的实施例:所述第一机器人还用于抓取所述干燥气体喷射装置的干燥气体喷头和沿预定轨迹移动所述干燥气体喷头,以便对清洗后的产品进行干燥。
16.根据本发明的另一个实例性的实施例,所述清洗系统还包括:抽气装置,安装到所述壳体上并与所述第一腔室连通,用于将所述第一腔室中的清洗时产生的含有污染物的水蒸气抽吸到所述壳体的外部。
17.根据本发明的另一个实例性的实施例,所述产品为医用传感器,所述污染物为在制造所述医用传感器时附着在所述医用传感器的表面上的氢氧化物。
18.根据本发明的另一个实例性的实施例,所述清洗系统还包括:第二机器人,安装在所述第二腔室中,用于抓取和移动所述产品;和托盘,安装在所述第二腔室中,用于装载所述产品。
19.根据本发明的另一个实例性的实施例,所述第二机器人用于从所述托盘抓取待清洗的产品和将抓取的待清洗的产品放置到所述容器中;并且所述第二机器人还用于从所述容器抓取已被清洗的产品和将抓取的已被清洗的产品装载到所述托盘上。
20.根据本发明的另一个实例性的实施例,所述壳体和所述通道一体成型;或者所述壳体和所述通道分开成型并彼此连接在一起。
21.根据本发明的另一个实例性的实施例,所述壳体具有分隔壁,所述分隔壁将所述壳体的内腔分隔成第一腔室和第二腔室;所述通道穿过所述分隔壁并连接到所述分隔壁上。
22.根据本发明的另一个实例性的实施例,所述壳体包括第一壳体和第二壳体,所述第一壳体限定所述第一腔室,所述第二壳体限定所述第二腔室,所述通道连接在所述第一壳体和所述第二壳体之间。
23.在根据本发明的前述各个实例性的实施例中,在清洗过程中,清洗室的用于输送产品的通道始终被完全密封,能够提高清洗效果。
24.此外,在根据本发明的前述一些实例性的实施例中,利用高温水蒸汽对产品进行清洗,从而不会对环境造成污染。
25.通过下文中参照附图对本发明所作的描述,本发明的其它目的和优点将显而易
见,并可帮助对本发明有全面的理解。
附图说明
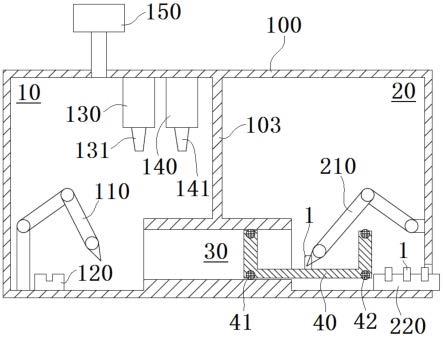
26.图1显示根据本发明的一个实例性的实施例的清洗系统的示意图,其中容器处于进入第二腔室的第二位置;
27.图2显示根据本发明的一个实例性的实施例的清洗系统的示意图,其中容器处于进入通道的中间位置;
28.图3显示根据本发明的一个实例性的实施例的清洗系统的示意图,其中容器处于进入第一腔室的第一位置;
29.图4显示第一机器人将待清洗的产品固定到夹具上的示意图;
30.图5显示第一机器人抓取水蒸气喷头对产品进行清洗的示意图;
31.图6显示第一机器人抓取干燥气体喷头对产品进行干燥的示意图;
32.图7显示第一机器人将已被清洗的产品放回到容器中的示意图;
33.图8显示容器将已被清洗的产品运回到第二腔室中的示意图;
34.图9显示根据本发明的另一个实例性的实施例的清洗系统的示意图。
具体实施方式
35.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。在说明书中,相同或相似的附图标号指示相同或相似的部件。下述参照附图对本发明实施方式的说明旨在对本发明的总体发明构思进行解释,而不应当理解为对本发明的一种限制。
36.另外,在下面的详细描述中,为便于解释,阐述了许多具体的细节以提供对本披露实施例的全面理解。然而明显地,一个或多个实施例在没有这些具体细节的情况下也可以被实施。在其他情况下,公知的结构和装置以图示的方式体现以简化附图。
37.根据本发明的一个总体技术构思,提供一种清洗系统,包括:壳体,具有彼此分隔开的第一腔室和第二腔室;通道,连接在所述第一腔室和所述第二腔室之间;和容器,可移动地设置在所述通道中,用于在所述第一腔室和所述第二腔室之间输送所述产品。在输送所述产品的过程中,所述容器与所述通道之间始终保持密封配合,以防止所述第一腔室与所述第二腔室连通。
38.图1显示根据本发明的一个实例性的实施例的清洗系统的示意图,其中容器40处于进入第二腔室20的第二位置。图2显示根据本发明的一个实例性的实施例的清洗系统的示意图,其中容器40处于进入通道30的中间位置;图3显示根据本发明的一个实例性的实施例的清洗系统的示意图,其中容器40处于进入第一腔室10的第一位置。
39.如图1至图3所示,在图示的实施例中,该清洗系统主要包括:壳体100、通道30和容器40。壳体100具有彼此分隔开的第一腔室10和第二腔室20。在图示的实施例中,第一腔室10为用于对产品1进行清洗的清洗室,第二腔室20为用于装载和卸载产品1的装卸室。
40.如图1至图3所示,在图示的实施例中,通道30连接在第一腔室10和第二腔室20之间。容器40可移动地设置在通道30中,用于在第一腔室10和第二腔室20之间输送产品1。
41.如图1至图3所示,在图示的实施例中,在输送产品1的过程中,容器40与通道30之间始终保持密封配合,以防止第一腔室10与第二腔室20连通。
42.如图1至图3所示,在图示的实施例中,容器40适于在第一位置(图3所示的位置)和第二位置(图1所示的位置)之间移动。
43.如图3所示,在图示的实施例中,当容器40移动到第一位置时,容器40至少部分进入第一腔室10中,以将装载在容器40中的待清洗的产品1输送到第一腔室10中和允许将已被清洗的产品1装载到容器40中。
44.如图1所示,在图示的实施例中,当容器40移动到第二位置时,容器40至少部分进入第二腔室20中,以将装载在容器40中的已被清洗的产品1输送到第二腔室20中和允许将待清洗的产品1装载到容器40中。
45.如图1至图3所示,在图示的实施例中,在容器40的一端上套装有第一弹性密封圈41,另一端上套装有第二弹性密封圈42。
46.如图3所示,在图示的实施例中,当容器40移动到第一位置时,第二弹性密封圈42仍位于通道30中并密封通道30。
47.如图1所示,在图示的实施例中,当容器40移动到第二位置时,第一弹性密封圈41仍位于通道30中并密封通道30。
48.如图2所示,在图示的实施例中,容器40还适于移动到位于第一位置和第二位置之间的中间位置。当容器40移动到中间位置时,容器40全部位于通道30中,使得通道30被第一弹性密封圈41和第二弹性密封圈42密封。
49.在本发明的一个实例性的实施例中,清洗系统还包括驱动装置(未图示),该驱动装置用于驱动容器40在第一位置和第二位置之间移动。该驱动装置可以为电机驱动机构或气缸驱动机构。
50.图4显示第一机器人110将待清洗的产品1固定到夹具120上的示意图。
51.如图1至图4所示,在图示的实施例中,清洗系统还包括第一机器人110和夹具120。第一机器人110安装在第一腔室10中,用于抓取和移动产品1。第一机器人110用于从容器40抓取输送到第一腔室10中的待清洗的产品1和将抓取的待清洗的产品1放置到夹具120上。夹具120安装在第一腔室10中,用于夹持和固定被放置到其上的产品1。
52.图5显示第一机器人110抓取水蒸气喷头131对产品1进行清洗的示意图。
53.如图1至图5所示,在图示的实施例中,清洗系统还包括水蒸汽喷射装置130。该水蒸汽喷射装置130安装在第一腔室10中,用于向输送到第一腔室10中的产品1喷射高温水蒸汽,以去除产品1的表面上的污染物。
54.如图1至图5所示,在图示的实施例中,第一机器人110还用于抓取水蒸汽喷射装置130的水蒸汽喷头131和沿预定轨迹移动水蒸汽喷头131,以便对固定在夹具120上的产品1的表面进行清洗。
55.图6显示第一机器人110抓取干燥气体喷头141对产品1进行干燥的示意图。
56.如图1至图6所示,在图示的实施例中,清洗系统还包括干燥气体喷射装置140。该干燥气体喷射装置140安装在第一腔室10中,用于向清洗后的产品1喷射干燥气体,以使产品1干燥。
57.如图1至图6所示,在图示的实施例中,第一机器人110还用于抓取干燥气体喷射装置140的干燥气体喷头141和沿预定轨迹移动干燥气体喷头141,以便对清洗后的产品1进行干燥。
58.图7显示第一机器人110将已被清洗的产品1放回到容器40中的示意图。
59.如图1至图7所示,在图示的实施例中,第一机器人110还用于从夹具120抓取已被清洗的产品1和将抓取的已被清洗的产品1放回到容器40中。
60.如图1至图7所示,在图示的实施例中,清洗系统还包括抽气装置150。该抽气装置150安装到壳体100上并与第一腔室10连通,用于将第一腔室10中的清洗时产生的含有污染物的水蒸气抽吸到壳体100的外部。
61.图8显示容器40将已被清洗的产品1运回到第二腔室20中的示意图。
62.如图1至图8所示,在图示的实施例中,清洗系统还包括第二机器人210和托盘220。第二机器人210安装在第二腔室20中,用于抓取和移动产品1。托盘220安装在第二腔室20中,用于装载产品1。
63.如图1所示,在图示的实施例中,第二机器人210用于从托盘220抓取待清洗的产品1和将抓取的待清洗的产品1放置到容器40中。
64.如图8所示,在图示的实施例中,第二机器人210还用于从容器40抓取已被清洗的产品1和将抓取的已被清洗的产品1装载到托盘220上。
65.如图1至图8所示,在图示的实施例中,壳体100具有分隔壁103,该分隔壁103将壳体100的内腔分隔成第一腔室10和第二腔室20。通道30穿过分隔壁103并连接到分隔壁103上。
66.但是,本发明的壳体100的结构不局限于图1至图8所示的实施例,还可以是其他结构。例如,图9显示根据本发明的另一个实例性的实施例的清洗系统的示意图。
67.如图9所示,在图示的实施例中,壳体100包括第一壳体101和第二壳体102。第一壳体101限定第一腔室10,第二壳体102限定第二腔室20,通道30连接在第一壳体101和第二壳体102之间。
68.如图1至图9所示,在图示的实施例中,壳体100和通道30一体成型。但是,本发明不局限于图示的实施例,壳体100和通道30也可以分开成型并彼此连接在一起。
69.如图1至图9所示,在图示的实施例中,产品1可以为传感器,例如,可以为医用传感器。前述污染物可以包括在制造医用传感器时附着在医用传感器的表面上的氢氧化物。但是,本发明不局限于此,前述污染物也可以为其他污染物或包括其他污染物。
70.下面将参照附图1-8来说明本发明的清洗过程。
71.首先,如图1所示,容器40移动到第二腔室20中,第二机器人210从托盘220中抓取待清洗的产品1和将抓取的待清洗的产品1放到容器40中;
72.然后,如图2至图4所示,容器40移动到第一腔室10中,第一机器人110从容器40中抓取待清洗的产品1和将抓取的待清洗的产品1放置到夹具120上;
73.然后,如图5所示,第一机器人110抓取水蒸汽喷头131和沿预定轨迹移动水蒸汽喷头131,以便对固定在夹具120上的产品1的表面进行清洗;
74.然后,如图6所示,第一机器人110抓取干燥气体喷头141和沿预定轨迹移动干燥气体喷头141,以便对清洗后的产品1进行干燥;
75.然后,如图7所示,第一机器人110从夹具120抓取已被清洗的产品1和将抓取的已被清洗的产品1放回到容器40中;
76.最后,如图8所示,容器40移动到第二腔室20中,第二机器人210从容器40抓取已被
清洗的产品1和将抓取的已被清洗的产品1装载到托盘220上。
77.请注意,在用水蒸汽喷头131对产品1进行清洗和用干燥气体喷头141对产品1进行干燥的过程中,容器40可以先暂时移动到通道30中,以防止干扰产品的清洗和干燥操作。
78.本领域的技术人员可以理解,上面所描述的实施例都是示例性的,并且本领域的技术人员可以对其进行改进,各种实施例中所描述的结构在不发生结构或者原理方面的冲突的情况下可以进行自由组合,这些变化理应落入本发明的保护范围以内。
79.虽然结合附图对本发明进行了说明,但是附图中公开的实施例旨在对本发明优选实施方式进行示例性说明,而不能理解为对本发明的一种限制。
80.虽然本发明的总体构思的一些实施例已被显示和说明,本领域普通技术人员将理解,在不背离本发明的总体构思的原则和精神的情况下,可对这些实施例做出改变,本发明的范围以权利要求和它们的等同物限定。
81.应注意,措词“包括”不排除其它元件或步骤,措词“一”或“一个”不排除多个。另外,权利要求的任何元件标号不应理解为限制本发明的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。