技术特征:
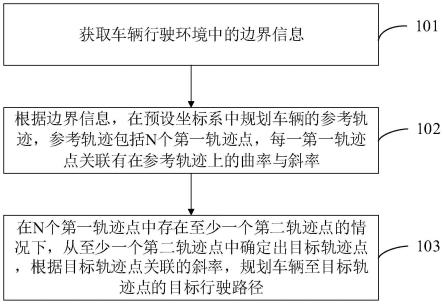
1.一种车辆行驶路径规划方法,其特征在于,包括:获取车辆行驶环境中的边界信息;根据所述边界信息,在预设坐标系中规划车辆的参考轨迹,所述参考轨迹包括n个第一轨迹点,每一所述第一轨迹点关联有在所述参考轨迹上的曲率与斜率,n为大于1的整数;在所述n个第一轨迹点中存在至少一个第二轨迹点的情况下,从所述至少一个第二轨迹点中确定出目标轨迹点,根据所述目标轨迹点关联的斜率,规划所述车辆至所述目标轨迹点的目标行驶路径;其中,所述第二轨迹点为关联的曲率大于曲率阈值的第一轨迹点。2.根据权利要求1所述的方法,其特征在于,所述从所述至少一个第二轨迹点中确定出目标轨迹点,根据所述目标轨迹点关联的斜率,规划所述车辆至所述目标轨迹点的目标行驶路径,包括:将所述至少一个第二轨迹点逐一确定为所述目标轨迹点;在将第i个所述第二轨迹点确定为目标轨迹点,且根据所述目标轨迹点关联的斜率,规划出所述车辆至所述目标轨迹点的行驶路径的情况下,将规划出的行驶路径作为所述目标行驶路径,i为正整数。3.根据权利要求1所述的方法,其特征在于,所述在所述n个第一轨迹点中存在至少一个第二轨迹点的情况下,从所述至少一个第二轨迹点中确定出目标轨迹点,包括:在检测到所述车辆行驶环境中存在障碍物的情况下,从所述参考轨迹中确定出第一轨迹,所述第一轨迹为根据所述障碍物的边界信息规划出的参考轨迹,所述第一轨迹包括m个第一轨迹点,所述m为小于或等于n的正整数;在所述m个第一轨迹点中存在第二轨迹点的情况下,将所述m个第一轨迹点中的第二轨迹点确定为所述目标轨迹点。4.根据权利要求1所述的方法,其特征在于,所述根据所述边界信息,在预设坐标系中规划车辆的参考轨迹之后,所述方法还包括:在所述n个第一轨迹点中不存在所述第二轨迹点的情况下,将所述n个第一轨迹点逐一确定为所述目标轨迹点;在将第j个所述第一轨迹点确定为目标轨迹点,且根据所述目标轨迹点关联的斜率,规划出所述车辆至所述目标轨迹点的行驶路径的情况下,将规划出的行驶路径作为所述目标行驶路径,j为小于或等于n的正整数。5.根据权利要求1至4任一项所述的方法,其特征在于,所述根据所述目标轨迹点关联的斜率,规划所述车辆至所述目标轨迹点的目标行驶路径,包括:根据所述目标轨迹点关联的斜率,以及预设路径规划规则,规划所述车辆至所述目标轨迹点的目标行驶路径;所述预设路径规划规则包括:使用至少一段圆弧路径连接车辆与所述目标轨迹点,其中,与所述车辆连接的圆弧路径在所述车辆处的切线方向为车辆的长度方向,与所述目标轨迹点连接的圆弧路径在所述目标轨迹点的切线的斜率与所述目标轨迹点关联的斜率相匹配,每一所述圆弧路径的半径大于或等于预设半径阈值;在使用有多段圆弧路径的情况下,还使得相邻的两段圆弧路径相切,且多段圆弧路径的总弧长最小。6.根据权利要求5所述的方法,其特征在于,所述根据所述目标轨迹点关联的斜率,以
及预设路径规划规则,规划所述车辆至所述目标轨迹点的目标行驶路径,包括:确定所述目标轨迹点在所述车辆的宽度方向上,相对于所述车辆的位置信息;在所述位置信息指示所述目标轨迹点位于所述车辆的目标侧的情况下,基于一段所述圆弧路径规划所述车辆至所述目标轨迹点的目标行驶路径。7.根据权利要求6所述的方法,其特征在于,所述确定所述目标轨迹点在所述车辆的宽度方向上,相对于所述车辆的位置信息之后,所述方法还包括:在满足以下任一条件的情况下,基于多段所述圆弧路径规划所述车辆至所述目标轨迹点的目标行驶路径:所述位置信息指示所述目标轨迹点位于所述车辆的目标侧,且基于一段所述圆弧路径规划目标行驶路径失败;所述位置信息指示所述目标轨迹点未位于所述车辆的目标侧。8.根据权利要求5所述的方法,其特征在于,所述第一轨迹点关联的曲率与斜率通过如下方式获取;根据所述n个第一轨迹点在所述参考轨迹上的排列顺序,确定第n个第一轨迹点以及与其相邻的第n-1个第一轨迹点与第n 1个第一轨迹点,n为大于1且小于n的整数;将所述第n个第一轨迹点与所述第n 1个第一轨迹点的直线连接线在所述预设坐标系中的斜率,确定为所述第n个第一轨迹点关联的斜率;将经过所述第n-1个第一轨迹点、所述第n个第一轨迹点以及所述第n 1个第一轨迹点的圆弧的曲率,确定为所述第n个第一轨迹点关联的曲率。9.一种车辆行驶路径规划装置,其特征在于,所述装置包括:获取模块,用于获取车辆行驶环境中的边界信息;第一规划模块,用于根据所述边界信息,在预设坐标系中规划车辆的参考轨迹,所述参考轨迹包括n个第一轨迹点,每一所述第一轨迹点关联有在所述参考轨迹上的曲率与斜率,n为大于1的整数;确定规划模块,用于在所述n个第一轨迹点中存在至少一个第二轨迹点的情况下,从所述至少一个第二轨迹点中确定出目标轨迹点,根据所述目标轨迹点关联的斜率,规划所述车辆至所述目标轨迹点的目标行驶路径;其中,所述第二轨迹点为关联的曲率大于曲率阈值的第一轨迹点。10.一种电子设备,其特征在于,所述设备包括:处理器以及存储有计算机程序指令的存储器;所述处理器执行所述计算机程序指令时实现如权利要求1-8任意一项所述的车辆行驶路径规划方法。11.一种计算机存储介质,其特征在于,所述计算机存储介质上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现如权利要求1-8任意一项所述的车辆行驶路径规划方法。
技术总结
本申请公开了一种车辆行驶路径规划方法、装置、设备及计算机存储介质。其中,车辆行驶路径规划方法包括:获取车辆行驶环境中的边界信息;根据边界信息,在预设坐标系中规划车辆的参考轨迹,参考轨迹包括N个第一轨迹点,每一第一轨迹点关联有在参考轨迹上的曲率与斜率,N为大于1的整数;在N个第一轨迹点中存在至少一个第二轨迹点的情况下,从至少一个第二轨迹点中确定出目标轨迹点,根据目标轨迹点关联的斜率,规划车辆至目标轨迹点的目标行驶路径;其中,第二轨迹点为关联的曲率大于曲率阈值的第一轨迹点。本申请实施例有助于规避车辆沿参考轨迹行驶至目标轨迹点后无法转向的情况,保证车辆行驶的可靠性。车辆行驶的可靠性。车辆行驶的可靠性。
技术研发人员:请求不公布姓名
受保护的技术使用者:新驱动重庆智能汽车有限公司
技术研发日:2021.08.06
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。