1.本发明涉及一种用于创建至少一个车辆周围环境地图的方法。此外,本发明还涉及一种控制器、一种计算机程序以及一种机器可读的存储介质。
背景技术:
2.自动化驾驶汽车要求在地图数据内进行定位以便驶过经计划的轨迹。通常除基于gnss的定位外还使用根据车辆周围环境中的地标或特征的基于特征的定位来确定车辆的位置。
3.已经已知用于创建基于特征的地图的各种各样的方法。这些常常是基于例如行车道标记、交通标志牌、行车道边界、建筑物等语义特征的,这些语义特征是从车辆环境的测量数据中所提取出的。这种语义特征可以用较少的存储空间需求来保存。然而,在农业地区中或在快速道路(schnellstraβen)上可能存在不能够求取到足够数量的可分辨的语义特征的风险。然而对于可靠的定位要求一个最小的特征密度。
4.此外已知对例如点或线的几何特征的提取。然而这种特征是内存密集的,并且仅能够受限地通过无线通信连接针对地图创建被传输。
技术实现要素:
5.本发明所基于的任务可以视为提出一种以最小的存储空间需求来创建可靠的定位地图的方法。
6.该任务借助一种用于通过控制器创建车辆周围环境的至少一个地图的方法、一种控制器、一种计算机程序和一种机器可读的存储介质来解决。本发明的有利实施方式能够通过在优选实施方式中所列举的措施实现。
7.根据本发明的一个方面,提供一种用于通过控制器创建车辆周围环境的至少一个地图的方法。
8.在一个步骤中,基于对所接收到的测量数据与所保存的或所接收到的地图数据的比较来检查第一特征、例如语义特征是否存在并且是完整的。因此,对现有地图数据进行更新或以新的地图数据的形式创设新的地图的需求可能是必要的。若例如在地图数据中未保存有第一特征,则可以触发对更新或创建地图数据的要求。
9.如果地图数据不存在或不完整,则从所接收到的测量数据中提取在车辆周围环境中可用的第一特征,其中,检查是否能够实现借助于所述第一语义特征在车辆周围环境内进行定位。为此例如可以将来自激光雷达传感器、摄像机传感器、雷达传感器、超声波传感器等的测量数据用于提取特征并用于地图创建。在此检查所提取出的特征是否足以用于实现在相应的车辆环境中进行定位。例如,可区分的特征的最小数量可能是必要的,以便能够实现可靠的定位。
10.在借助于所求取到的第一特征进行的定位不准确或不能够实现的情况下,从所接
收到的测量数据中提取第二特征。在此,第二特征特别是用于完善或者说补充第一特征。
11.在此可以将第二特征用于以有重叠或没有重叠的方式填补第一特征中的空缺。
12.随后基于所求取到的第一特征和/或所求取到的第二特征创建该车辆周围环境的数字地图。
13.第一特征特别是理解为第一类型的特征,而第二特征理解为第二类型的特征。例如,第一特征可以构型为语义特征或语义景观特征,第二特征可以构型为几何特征或景观特征。
14.此外,第一特征可以基于来自第一传感器的测量数据来求取,而第二特征可以基于来自第二传感器的测量数据来求取。第一特征可以是例如根据雷达测量数据所求取到的特征,而第二特征可以是根据摄像机测量数据或激光雷达测量数据所求取到的特征。
15.通过该方法能够实现在其所要求的存储空间方面和在精度方面都得到优化的对地图的创建。因此,以这种方式所创建的数字地图能够用于尤其稳健且准确的定位。
16.通过该方法所创建的地图不再是针对特定的特征类型所构型的专用地图,而是具有多个不同的特征类型或特征种类,这些类型或特征被自动化地选择,以便使得能够实现全面的定位。
17.根据本发明的另一方面提供一种控制器,其中,该控制器设置为用于实施该方法。该控制器例如可以是车辆侧的控制器、车辆外部的控制器或车辆外部的服务器单元,例如云系统。控制器可以与存储器单元连接或者具有集成的存储器单元,以便接收和至少暂时地存储测量数据。此外,该存储器单元可以用于保存数字地图或地图区段。
18.测量数据可以从一个或多个车辆传感器被接收。在此,测量数据可以在内部或通过有线通信连接或通过无线通信连接从车辆传感器向控制器进行传输。
19.此外,根据本发明的一个方面提供一种计算机程序,该计算机程序包括指令,所述指令在通过计算机或控制器执行该计算机程序时促使所述计算机或控制器执行根据本发明的方法。
20.根据本发明的另一方面,提供一种机器可读的存储介质,在该存储介质上存储有根据本发明的计算机程序。
21.能够用于求取测量数据的车辆在此可以根据bast(bundesanstalt f
ü
r straβenwese,德国联邦交通研究所)标准受辅助地、部分自动化地、高度自动化地和/或完全自动化地或者说无驾驶员地运行。
22.该车辆原则上可以构型为移动单元,该移动单元可以根据bast标准受辅助地、部分自动化地、高度自动化地和/或完全自动化地或者说无驾驶员地运行。该移动单元例如可以构型为车辆、机器人、无人机、水路交通运输工具、轨道车辆、机器人出租车、工业机器人、商用车、巴士、飞机、直升机等。
23.在一种实施例中,在借助于所求取到的第一特征进行的定位不准确或不能够实现的情况下,从所接收到的测量数据中提取所有可用的第二特征,或者仅提取那些对于完善所求取到的地图特征所必要的第二特征。由此能够平行于第一特征地冗余地求取所有可能的第二特征。在一个后续的步骤中,可以对相关或必要的第二特征进行滤波或与第一特征融合。替代地可以仅仅求取用于填补第一特征的空缺的第二特征。特别是填补所创建的数字地图或数字地图区段中在空间上的空缺。特别是最小特征密度是必要的,以便使得能够
实现根据所创建的数字地图高效地进行定位。因此,可以将具有过低的特征密度的地图区域看作空缺。
24.根据另一实施方式,数字地图至少局部地基于所述第一特征和所述第二特征的融合来创建。通过该措施能够在处理步骤中将第二特征转换为第一特征或反之,以便实现在技术上更简单的定位。替代或附加地可以通过所求取到的第二特征例如通过求平均值将在重叠区域内的所求取到的第一特征更加精确化。
25.根据另一实施方式,根据所述第二特征来创建第一特征并将第一特征保存在数字地图中。由此进行第二特征到第一特征的转换,以便提供具有第一特征的全面的地图。
26.根据另一实施方式,第一特征作为语义特征、作为几何特征或作为第一车辆传感器的传感器特定的特征被求取。根据另一实施方式,第二特征作为几何特征或作为第二车辆传感器的传感器特定的特征被求取。因此能够基于大量可能的特征类型来创建数字地图。
27.根据另一实施方式,基于统计学方法、特别是基于定位不可靠性超过阈值、基于可用的语义特征的数量或基于语义特征的重复来执行在所接收到的测量数据与所保存的地图数据之间的比较。因此,求取空间方向上的协方差已经足以用于检查数字地图在该空间方向上是否达到足够的品质。然而,该方法并不限于上述统计学方法。而是可以将任何统计学方法和算法用于检查是否能够实现根据所求取到的特征在数字地图中以预定义的精度进行定位。
附图说明
28.以下参照经高度简化的示意图详细描述本发明的优选实施例。在此示出:
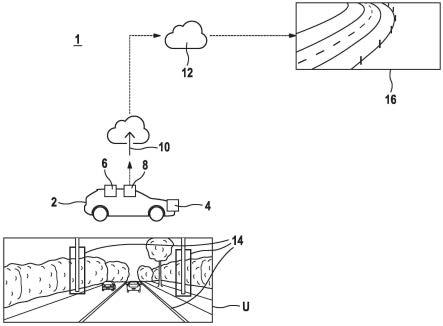
29.图1:根据一种实施方式的车辆布置的示意性俯视图,以及
30.图2:用于说明根据一种实施方式的根据本发明的方法的示意性流程图。
具体实施方式
31.图1示出根据一种实施方式的车辆布置1的示意性俯视图。车辆布置1具有至少一个车辆2,该车辆具有多个车辆传感器4、6。
32.车辆2特别是具有第一车辆传感器4,该车辆传感器示例性地构型为激光雷达传感器。此外设置有构型为雷达传感器的第二车辆传感器6。
33.车辆传感器4、6用于通过采样车辆环境u来求取测量数据。所收集的测量数据由车辆侧控制器8接收。
34.控制器8能够处理和特别是分析评价测量数据。此外,控制器8能够通过无线通信连接10将测量数据发送到车辆外部的服务器单元12,该服务器单元例如构型为云。
35.车辆外部的服务器单元12能够对测量数据进行处理用于提取景观特征或者说特征14,并将所述测量数据用于创建数字地图16。
36.图2是用于说明根据一种实施方式的根据本发明的方法18的示意性的流程图。基于图1中所示出的车辆布置1来描述方法18。
37.车辆2驶过20车辆周围环境u并决定是否应将所求取到的测量数据传递到外部服务器单元12。为此检查21地图是否是可用的。
38.若对于车辆周围环境u无地图可用,则通过车辆2来创建22针对该区域的数字地图。这通过将测量数据传递到外部服务器单元12或在车辆侧通过控制器8来进行,该控制器将测量数据处理到数字地图区段中。
39.如果数字地图可用,则可以在该地图的品质方面进行检查23。在该可用地图的品质足够的情况下,则不要求另外的操作24,因为车辆2能够没有问题地在该地图自我定位。
40.若地图的品质不足以用于进行定位,则将车辆传感器4、6的测量数据传递到外部服务器单元12,以便优化或完善25地图。
41.基于对所接收到的测量数据与所保存的或所接收到的地图数据的比较来检查26第一特征、例如语义特征是否存在并且是完整的。
42.如果地图数据不存在或是不完整的,则从所接收到的测量数据中提取在车辆周围环境u中可用的第一特征。在此检查是否能够实现借助于该第一语义特征在车辆周围环境u中进行定位。如果能够实现定位,则将相应的特征发送27到外部服务器单元12。
43.在借助于所求取到的第一特征进行的定位不准确或不能够实现的情况下,从所接收到的测量数据中提取28第二特征。这些第二特征例如可以是几何特征。随后,基于所求取到的第一特征和/或第二特征来创建29车辆周围环境u的数字地图。
44.车辆的控制器8能够决定是否附加地求取第二特征。在所示出的实施方式中,第一特征优先,因为第一特征作为语义特征是稳健的并且具有较低的存储空间需求。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。