1.本发明总体涉及医疗系统,并且具体地涉及用于使用图形用户界面模板来减少电生理规程的设置时间的方法和系统。
背景技术:
2.一些执行医疗规程(诸如在患者心脏中执行的电解剖标测和/或组织消融规程)的医师可使用一个或多个模板来使医疗规程自动化并提高规程的质量。
3.例如,美国专利申请公开号2015/0282729描述了使用各种类型的模板来确定和/或表示与心脏表面有关的生理信息。
4.pct国际公开wo 2021/084476描述了标测心脏组织中的电活动以指导放置装置以干预(例如,治疗)结构性心脏病。在一些示例性实施方案中,该干预包括放置可植入装置,以及/或者定位用于去除和/或重塑组织的治疗装置。在一些示例性实施方案中,电活动标测与体腔的空间标测一起执行。在一些示例性实施方案中,将干预装置位置与对心脏电功能至关重要的解剖结构的测量位置进行比较,以评估和/或防止由于装置损害心脏电功能而引起的并发症。
技术实现要素:
5.本文所描述的本发明的实施方案提供了一种方法,该方法包括将导管插入到患者器官的腔中以用于执行医疗规程,该腔是给定腔类型。通过使用导管访问腔的表面上的一个或多个解剖点来执行腔的局部解剖标测。基于该局部解剖标测,来选择图形用户界面(gui)模板,该gui模板被指定用于将医疗规程应用于给定腔类型。将所选择的gui模板呈现给用户以用于在腔中执行医疗规程。
6.在一些实施方案中,选择gui模板包括从被指定用于多个相应腔类型的多个gui模板中选择gui模板。在其他实施方案中,选择gui模板包括向该局部解剖标测应用使用一个或多个腔的一个或多个其他解剖标测进行预训练的神经网络。在又其他实施方案中,执行局部解剖标测包括产生所访问的解剖点的三角形网格,并且选择gui模板包括将经预训练的神经网络应用于该三角形网格。
7.在实施方案中,局部解剖标测中的所访问的解剖点的第一数量小于用于训练神经网络的解剖点的第二数量。在另一个实施方案中,一个或多个腔中的至少一个腔被标测到另一患者中。在又另一个实施方案中,患者器官包括患者心脏,并且医疗规程包括对患者心脏的组织的消融。
8.在一些实施方案中,患者器官包括患者心脏,并且医疗规程包括对患者心脏的组织的电解剖标测。在其他实施方案中,选择gui模板包括:基于局部解剖标测来识别给定腔类型,以及基于所识别的腔类型选择gui模板。在又其他实施方案中,选择gui模板包括基于所识别的腔类型以及医疗规程的类型来选择gui模板。
9.根据本发明的实施方案,还提供了一种包括处理器和输出装置的系统。该处理器
被配置为:(i)从插入到具有给定腔类型的腔的患者器官中并访问该腔的表面上的一个或多个解剖点的导管接收该腔的局部解剖标测,以及(ii)基于该局部解剖标测来选择被指定用于将医疗规程应用于给定腔类型的图形用户界面(gui)模板。该输出装置被配置为将所选择的gui模板呈现给用户以用于在腔中执行医疗规程。
附图说明
10.结合附图,通过以下对本发明的实施方案的详细描述,将更全面地理解本发明,其中:
11.图1是根据本发明的示例性实施方案的基于导管的跟踪和消融系统的示意性图解;
12.图2是根据本发明的示例性实施方案的示意性地示出了用于减少电生理规程的设置时间的方法的流程图;并且
13.图3是根据本发明的示例性实施方案的示出了应用于心腔的局部解剖标测以减少电生理规程的设置时间的神经网络的结构的示意性框图。
具体实施方式
14.概述
15.一些医疗规程(诸如患者心脏中的电生理(ep)规程(例如,电解剖(ea)标测和/或组织消融))通常需要详细设置用于执行该规程的操作。例如,在执行消融规程时,医师将导管插入心脏的腔(例如,左心房(la))中以用于在la中执行消融。在一些情况下,该规程可包括:(i)la的解剖标测和ea标测,以及随后(ii)组织消融,该组织消融是基于ea标测来计划和执行。上述操作需要设置操作,这可能会耗费时间并且令人不期望地延长规程的持续时间。例如,设置操作可包括:产生la的三维(3d)标测图;选择和分析在ea标测期间获取的ep信号;以及产生用于执行该规程的合适的图形用户界面(gui)。
16.下文描述的本发明的实施方案提供了用于通过使设置的一些步骤自动化来减少医疗规程的设置时间的改进技术。更具体地,减少ep规程(诸如在患者心脏的所选择腔中执行的ea标测和/或组织消融)的设置时间。
17.在一些示例性实施方案中,在选择了规程类型和心脏腔室之后,例如,患者心脏的左心房中的组织消融,医师将具有电极的导管插入到la中。随后,医师移动导管以访问la表面上的一些解剖点,并且使用电极来获取解剖点及其相应位置(例如,使用合适的位置跟踪系统)。
18.在一些示例性实施方案中,用于执行ep规程的系统包括处理器,该处理器被配置为使用从导管接收到的所获取的解剖点执行la的局部解剖标测。在本示例中,处理器产生所访问和所获取的解剖点的三角形网格。处理器被进一步配置为向该三角形网格应用神经网络(nn),诸如可与递归神经网络(rnn)组合或可不与其组合的卷积神经网络(cnn),该神经网络在执行ep规程之前被训练。该nn是使用先前存储在系统的存储器中的其他解剖标测来进行预训练。例如,其他解剖标测可包括其他患者的心脏腔室(包括左心房)的完整解剖标测。
19.在一些示例性实施方案中,处理器被配置为基于在nn训练中产生的数据,针对应
用于患者心脏的每个所选择腔(例如,腔室)的每个ep规程产生或接收一组模板。在简化的示例中,产生四个模板来用于在患者心脏的四个腔室(左右心房和左右心室)中执行ea标测,并且产生另外四个模板来用于在前述四个腔室中执行组织消融。注意,在一些情况下,可产生多个模板来用于在这些腔室中的至少一个腔室中执行给定规程。例如,给定腔室的不同相应区域中的多个消融位点可能需要多个模板。
20.在一些示例性实施方案中,在接收到足够的解剖点之后,处理器被配置为基于局部解剖标测来识别患者心脏的la。此外,处理器被配置为基于局部解剖标测来选择被指定用于将医疗规程(例如,组织消融)应用于患者心脏的所考虑腔室(例如,la)的图形用户界面(gui)模板。
21.在一些示例性实施方案中,系统包括输出装置,诸如显示器,该输出装置被配置为将所选择的gui模板(和la标测图)呈现给用户(医师),以用于在la中执行组织消融。
22.在一些情况下,医师可决定在患者心脏的另一腔室中执行另外的规程。例如,右心房中的ea标测。在一些示例性实施方案中,医师将导管插入到右心房以用于执行如上所述的局部标测,并且处理器被配置为使用上文详细描述的技术来选择对应的模板并将其呈现给医师。
23.所公开的技术提高医疗规程(诸如但不限于电生理规程)的质量,并且通过使规程的过程中的至少一些步骤自动化来减少其循环时间。
24.系统描述
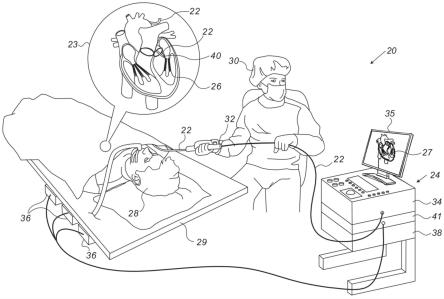
25.图1为根据本发明的示例性实施方案的基于导管的跟踪和消融系统20的示意性图解。
26.在一些示例性实施方案中,系统20包括导管22(在本示例中为心脏导管)和控制台24。在本文所述的示例性实施方案中,导管22可用于心脏26中的任何合适的治疗目的和/或诊断目的,诸如使用下文描述的技术进行的电解剖(ea)标测和/或组织消融。
27.在一些示例性实施方案中,控制台24包括处理器34(通常为通用计算机),该处理器具有合适的前端和接口电路38,以用于经由导管22接收信号并且用于控制本文所描述的系统20的其他部件。控制台24还包括输出装置(在本示例中为用户显示器35),该输出装置被配置为从处理器34接收心脏26的标测图27,以及基于下文相对于图2描述的模板来显示图形用户界面(gui)的标测图27和附加部件。
28.在一些示例性实施方案中,标测图27可包括使用任何合适的技术产生的任何合适类型的三维(3d)解剖标测图。例如,可使用通过合适的医疗成像系统产生的解剖图像、或使用由biosense webster inc.(irvine,calif.)生产的carto
tm
系统执行快速解剖标测(fam)技术、或使用任何其他合适的技术或使用以上的任何合适的组合来产生解剖标测图。
29.现在参考插图23。在一些示例性实施方案中,在执行消融规程之前,医师30将导管22插入穿过躺在手术台29上的患者28的脉管系统,以便执行心脏26的所考虑组织的电解剖标测。
30.在一些示例性实施方案中,导管22包括具有多个感测电极(未示出)的远侧端部组件40。例如,远侧端部组件40可包括:(i)篮状导管,该篮状导管具有多个样条,每个样条具有多个感测电极,(ii)球囊导管,该球囊导管具有设置在球囊的表面上的多个感测电极,或(iii)局灶导管,该局灶导管具有多个感测电极。每个感测电极被配置为响应于感测心脏26
的组织中的电生理(ep)信号而产生指示所感测ep信号的一个或多个信号。
31.在一些示例性实施方案中,导管22的近侧端部尤其连接到接口电路38,以便将这些信号传送到处理器34以用于执行电解剖标测。
32.在一些示例性实施方案中,在电解剖标测期间,由远侧端部组件40的感测电极产生的信号可包括数千个数据点,例如约50,000个数据点或甚至更多。基于数据点,处理器34被配置为在标测图27上呈现指示在心脏26的表面上传播的电信号的矢量,并且基于所呈现的矢量,医师30确定用于消融心脏26中的组织的一个或多个位点。然而,产生、检查和分析前述的大量数据点和矢量可能会延长消融规程的持续时间。此外,与产生和分析大量数据点相关联的工作努力可能使医师筋疲力尽,并且因此可能损害消融规程的质量。
33.在本公开和权利要求的上下文中,针对任何数值或范围的术语“约”或“大致”指示合适的尺寸公差,该合适的尺寸公差允许部件的一部分或集合为本文所述的预期目的起作用。
34.在一些示例性实施方案中,导管22可包括联接到远侧端部组件40的一个或多个消融电极(未示出)。消融电极被配置为对心脏26的目标位置处的组织进行消融。在确定消融计划之后,医师30使用用于操纵导管22的操纵器32来将远侧端部组件40导航成紧密接近心脏26中的目标位置。另外地或另选地,医师30可使用用于消融心脏26的组织的任何其他种类的合适导管以便执行前述消融计划。
35.在一些示例性实施方案中,使用磁位置跟踪系统的位置传感器(未示出)测量远侧端部组件40在心腔中的位置。在本示例中,控制台24包括驱动电路41,该驱动电路被配置为驱动被放置在躺在手术台29上的患者28体外的已知位置处(例如,患者的躯干下方)的磁场发生器36。位置传感器耦接到远侧端部,并且被配置为响应于从场发生器36感测到的外部磁场而生成位置信号。这些位置信号指示导管22的远侧端部在位置跟踪系统的坐标系中的位置。
36.该位置感测方法在各种医疗应用中例如在由biosense webster inc.(irvine,calif.)生产的carto
tm
系统中实现,并且详细地描述于美国专利号5,391,199、6,690,963、6,484,118、6,239,724、6,618,612和6,332,089、pct专利公布wo 96/05768以及美国专利申请公布号2002/0065455 a1、2003/0120150 a1和2004/0068178 a1中,这些专利的公开内容全部以引用方式并入本文。
37.在一些示例性实施方案中,位置跟踪系统的坐标系与系统20和标测图27的坐标系配准,使得处理器34被配置为在标测图27上显示导管22的远侧端部的位置。
38.在一些示例性实施方案中,当执行消融规程时,医师将导管22插入到心脏26的腔中,例如,心脏的左心房(la)。在一些情况下,该规程可包括:(i)la的解剖标测(未示出),其是通过访问la组织的表面上的多个(例如,数千个)解剖点来执行。解剖标测之后通常是对la中的感兴趣部分的ea标测。基于ea标测,医师30需要执行设置操作,这可能会耗费时间并且令人不期望地可能延长规程的持续时间。例如,设置操作可包括:产生la的三维(3d)标测图;选择和分析在ea标测期间从导管22接收的ep信号;以及产生用于执行该规程的合适的图形用户界面(gui)。
39.在一些示例性实施方案中,处理器34被配置为使用从导管22接收的少量(例如,少于约一百个)解剖点来执行la的局部解剖标测。在本示例中,处理器34产生基于解剖点的三
角形网格(未示出),并且向该三角形网格应用经过了预训练的神经网络(nn)。在一些实施方案中,nn可包括卷积神经网络(cnn)或递归神经网络(rnn)或cnn和rnn的组合(例如下文相对于图3描述了其架构)。
40.在一些示例性实施方案中,cnn可在处理器34中、或在系统20的控制台24的任何其他处理装置中、或在系统20外部的任何合适的计算机中实现。使用已经完成的并且先前存储在系统20的存储器中或前述外部计算机的存储器中的其他解剖标测来训练cnn。例如,其他解剖标测可包括其他患者的左心房的完整解剖标测和/或在对患者28的la执行的先前规程中执行的完整解剖标测。
41.在一些示例性实施方案中,处理器34被配置为基于在cnn的训练期间产生的数据,来针对应用于患者心脏的每个所选择腔(例如,腔室)的每个ep规程接收一组模板。在本示例中,处理器34和/或cnn可针对在相应患者心脏的一个或多个la中执行的相应类型的消融规程产生或接收一个或多个gui模板。例如,每个gui模板可包括:(i)感兴趣窗口的设置(例如,当标测心室时,感兴趣窗口围绕心电图信号的r峰值进行定位,并且当标测心房时,感兴趣窗口围绕心电图信号的p波进行定位),(ii)标测图的名称,以及(iii)标测图视图——例如,用于查看右心房的前后位(ap)和/或后前位(pa),以及用于心室的lao和rao。注意,术语lao是指将视图旋转到患者的左侧(导管和脊柱将处于标测图的右侧),并且术语rao是指患者的右侧(导管和脊柱将处于标测图的左侧)。另外或另选地,gui模板可包括任何其他合适的项目。
42.在一些示例性实施方案中,在接收到足够的解剖点(例如,约1000个点)之后,处理器34被配置为基于局部解剖标测从上述gui模板中选择被指定用于将组织消融应用于心脏26的la的gui模板。
43.在一些示例性实施方案中,处理器34被配置为例如在显示器35上将所选择的gui模板呈现给医师30,以用于在la中执行组织消融。
44.在一些情况下,医师30可决定在患者心脏的另一腔室中执行另外的规程。例如,右心房中的ea标测。在一些实施方案中,医师30将导管22插入到右心房中以用于执行局部标测,并且处理器34被配置为使用上文详细描述的技术的实施方案来选择对应gui模板并将其呈现给医师30,以用于在心脏26的la中执行消融规程。
45.在一些示例性实施方案中,处理器34通常包括通用计算机,该通用计算机在软件中被编程以执行本文所述的功能。该软件可通过网络以电子形式被下载到计算机,例如或者其可另选地或另外地设置和/或存储在非临时性有形介质(诸如磁存储器、光存储器或电子存储器)上。
46.通过举例的方式示出了系统20的该特定配置,以便说明通过本发明的实施方案解决的某些问题,并且展示这些实施方案在增强这种系统的性能方面的应用。然而,本发明的实施方案决不限于这种特定类别的示例性系统,并且本文所述的原理可类似地应用于其他类别的医疗系统。
47.使用基于神经网络的图形用户界面来减少电生理规程的设置时间
48.图2是根据本发明的实施方案的示意性地示出了用于使用gui模板和神经网络(nn)来减少电生理(ep)规程的设置时间的方法的流程图。在本示例中,nn包括上文相对于图1描述的卷积神经网络(cnn),并且下文相对于图3详细描述了cnn的架构。
49.在图2的示例性实施方案中,ep规程在心脏26的腔室中执行,并且可包括心脏26中的ea标测和/或组织消融。然而,在其他实施方案中,本文所述的技术可在必要的修改后用于其他合适类别的医疗规程。
50.该方法开始于规程选择步骤50,其中医师选择医疗规程,诸如在心脏26中执行的ep规程,诸如但不限于如上所述的ea标测和/或组织消融。
51.在导管插入步骤52处,医师30将导管22插入到心脏26中以用于在具有给定腔类型的心脏26的所选择腔(例如,腔室)中执行ep规程。在本示例中,心脏26的被选择用于执行ep规程的左心房(la)具有与心脏26的其他腔室的特征不同的一个或多个特征。注意,本文所述的方法可在必要的修改后应用于心脏26的所有腔室(即,左心室、右心房和右心室)。
52.在局部解剖标测步骤54处,医师30操纵远侧端部组件40以用于访问la表面上的解剖点,以便获取用于执行la的至少局部解剖标测的标测点。在本示例中,医师30应用快速解剖标测(fam)技术,并且与完整解剖标测所需的标测点的数量相比,所获取的标测点的数量要少得多。例如,对于la的完整标测需要获取约5000个标测点,而在步骤54的局部解剖标测中,仅获取约1000个点。
53.在一些实施方案中,在局部解剖标测步骤54中,处理器34基于所访问和所获取的解剖点来产生三角形网格。在本公开的上下文和权利要求中,术语“三角形网格”是指虚拟网格,其是基于在步骤54的局部解剖标测期间由远侧端部组件40获取的解剖点的位置。网格由虚拟三角形构成,使得所获取的解剖点定位在网格的三角形的相应顶点上。处理器34被配置为基于在局部解剖标测步骤54中获取的解剖点来限定虚拟网格的结构(拓扑和几何形状)(例如,三角形的大小和方向)。在此类实施方案中,步骤54输出使所获取的解剖点定位在网格的相应顶点上的三角形虚拟网格。
54.在第一决策步骤56处,处理器34检查在步骤54中获取的标测点的数量是否足以在该方法中进行。如果否,则该方法循环回到步骤54,直到已经获取足够数量的标测点(例如,大于约1000个点)。注意,处理器34被配置为基于已经由远侧端部组件40获取的附加标测点来更改网格的拓扑和/或几何形状。
55.在步骤54中获取的标测点的数量足够的情况下,方法进行到腔室验证步骤58,其中cnn(其可在处理器34或系统20的任何其他装置中实现)基于局部解剖标测来识别所获取的标测点具有对其他患者的心脏的la独特的特征。例如,将血液从患者28的肺转移到心脏26的肺静脉(pv)的形状。
56.在gui模板选择步骤60处,处理器34基于上文在步骤54中执行的局部解剖标测和步骤58中的腔室识别来选择被指定用于将ep规程应用于心脏26的la的gui模板。
57.在一些实施方案中,gui模板是由处理器34从在规程之前产生的多个gui模板中选择的,并且是基于由在执行ep规程之前被训练的cnn识别的腔室。在本示例中,cnn是使用先前存储在系统20的任何合适的存储器装置和/或处理器34中的其他解剖标测(诸如但不限于心脏腔室的完整解剖标测)来进行预训练。在此类实施方案中,在所存储的解剖标测图上训练cnn,并且在结束训练之后,将cnn应用于在上述步骤54中描述的局部解剖标测期间产生的三角形网格,以便识别心脏26的腔室(例如,la)。
58.在一些实施方案中,基于所识别的腔室和所选择的规程,处理器34被配置为从在该规程之前产生的gui模板中选择适合于在心脏26的la中执行所选择的ep规程的gui模板,
如上所述。
59.在一个具体实施中,对用于基于局部解剖标测来识别腔室的神经网络的训练可使用随机游走技术对由相应存储的解剖标测图产生的相应网格的拓扑和几何呈现执行。随后,可准备随机游走的表示并将其插入到递归神经网络(rnn)中,该递归神经网络累积随机游走的属性以用于更新神经网络。经训练的神经网络应用于在局部解剖标测期间产生的三角形网格,并且可自动输出心脏26的所识别的腔室(例如,la),使得处理器34可从在规程之前(例如,通过处理器34和/或通过神经网络,或通过任何其他合适的装置)产生的gui模板中选择最合适的gui模板。在一些情况下,rnn可与cnn组合,以便架构可获得经训练的神经网络的改进性能。以下论文中详细描述了la的自动识别:lahav等人发表于acm trans.graph.第39卷第6期文章263(2020年12月)的标题为“meshwalker:deep mesh understanding by random walks”的论文,其公开内容以引用方式并入本文。
60.注意,步骤58和步骤60可组合成单个步骤,使得(i)经训练的神经网络基于局部解剖标测来识别腔室,以及(ii)基于腔室识别和所选择的规程,处理器34选择最合适的gui模板。在本示例中,所选择的gui模板被指定用于将所选择的ep规程(例如,组织消融)应用于心脏26的la。
61.在gui-模板呈现步骤62处,处理器34将所选择的gui模板和左心房的标测图呈现给用户,以用于在la中执行ep规程。在第二决策步骤64处,处理器34检查ea标测和/或组织消融规程是否已经完成。在标测和/或消融规程已经完成的情况下,方法结束,并且医师可从la中取出远侧端部组件40。在ea标测和/或组织消融规程已经完成的情况下,方法进行到规程延续步骤66,其中医师30继续该规程。
62.在第三决策步骤68处,处理器34检查医师30是否决定改变经治疗的腔室和/或规程的类型。在实施方案中,医师可决定对心脏26的右心房(ra)执行ea标测。在该实施方案中,方法循环回到步骤50以用于在处理器34中配准前述选择,并且方法重复以用于在心脏26的ra中执行ea标测。
63.在医师30保留在la中执行的所选择ep规程的情况下,方法从步骤68循环回到步骤66,以用于继续并结束在心脏26的la中执行的最初选择的ep规程,如上所述。
64.图3是根据本发明的实施方案的示出了应用于心腔的局部解剖标测以用于减少ep规程的设置时间的神经网络(nn)100的架构的示意性框图。在本示例中,心腔包括左心房(la),并且ep规程包括la的电解剖(ea)标测或心脏26的la中的组织的消融,如上文在图2的方法中详细描述的。
65.在一些实施方案中,nn 100的架构包括卷积神经网络(cnn),该卷积神经网络具有递归神经网络(rnn)的层,在本文中也称为rnn层130,在下文更详细地描述。
66.在一些实施方案中,箭头111表示前述随机游走的一系列步骤(例如,步骤102、104、106和108),该随机游走在通过nn 100识别心脏腔室(例如,la)的过程中应用于三角形网格(在上述图2的步骤54中描述的局部解剖标测中形成)。
67.在一些实施方案中,箭头121指示nn 100的深度。在本示例中,nn100包括本文所述的层110、120、130、140和150,但是在其他实施方案中,nn 100可包括任何合适的附加或替代层。
68.在一些实施方案中,输入层110提供上述图2中描述的随机游走的三角形网格中的
位置。在本示例中,层110具有三维(3d)输出。
69.在一些实施方案中,在步骤102处,随机游走开始于三角形网格,并且游走路径的长度在步骤104、106和108中逐渐增加。
70.在一些实施方案中,层120包括对展平输入进行操作(例如,将输入数据转换为一维阵列)的全连接(fc)层,使得每个输入都连接到所有可用的神经元。在本示例中,层120包括一个或多个fc层,并且被配置为产生256的输出尺寸。
71.在一些实施方案中,rnn层130包括一个或多个层,并且被配置为基于层110和fc层120的输入来记住和累积在步骤102-106中执行的随机游走。在本示例中,rnn层130包括三层并且具有512的输出尺寸。在rnn层130中,节点之间的连接沿着时间序列形成有向图。此外,rnn层130可使用其内部状态(存储器)来处理通过步骤102-108在层110中提供的可变长度输入序列。
72.在一些实施方案中,rnn层130被配置为沿着步骤102-108的序列记住和累积知识,并且不限于固定长度的输入或输出。rnn层130的输出包括状态矢量,该状态矢量包含沿着由层110的输入提供的游走搜集的信息。
73.在一些实施方案中,层140包括被配置为输出多个类别的fc层。在本示例中,层140可输出对应于心脏26的四个腔室的四个类别。
74.在一些实施方案中,层140包括预测层,该预测层被配置为基于沿着步骤102-108的序列的知识累积来输出单个描述符矢量。在本示例中,矢量包括所识别的腔室,例如,心脏26的左心房。注意,层140和层150一起提供形状由三角形网格提供的物体的分类,在本示例中,la选自心脏26的腔或腔室。
75.在一些实施方案中,在步骤102和步骤104中对层150的输出通常是无意义的,因为在游走期间收集的信息不足。在步骤106中对层150的输出可以是心脏26的腔室中的一个腔室,并且在步骤108中对层150的输出是心脏26的la,这是基于在上述三角形网格中的游走期间收集的累积信息来识别。
76.如上文图2的步骤58中所述,并且进一步在nn 100的架构和操作步骤中描述的,处理器34应用神经网络(例如,nn 100或nn的任何其他合适的架构),以便基于局部解剖标测来识别la。
77.在一些实施方案中,在nn 100基于局部解剖标测来识别la之后,处理器34可选择和显示(例如,在显示器35上)所选择的gui模板,如上文图2的相应步骤60和62中所描述的。注意,gui模板选自提前准备的多个gui模板,并且被指定用于将医疗规程(例如,组织消融)应用于心脏26的对应腔室(例如,左心房)。
78.参考lahav等人的前述论文提供了nn 100的该特定架构,该论文更详细地描述了nn架构,并且其公开内容以引用方式并入本文。然而,通过举例的方式示出了nn 100,以便说明通过本发明的实施方案解决的某些问题,并且展示这些实施方案在增强系统20的性能方面的应用。然而,本发明的实施方案决不限于该特定类别的示例性神经网络,并且本文所述的原理可类似地在必要的修改后应用于其他类别的合适类型的神经网络以及可与rnn组合或可不与其组合的cnn的其他合适的架构。
79.尽管本文所述的实施方案主要解决电生理(ep)规程,诸如在患者心脏中执行的电解剖标测和组织消融,但是本文所述的方法和系统也可用于其他应用,诸如用于结构性心
脏规程,以及用于在患者的除心脏之外的器官上执行的任何ep规程。
80.因此应当理解,上面描述的实施方案以举例的方式被引用,并且本发明不限于上文特定示出和描述的内容。相反,本发明的范围包括上文描述的各种特征的组合和子组合以及它们的变型和修改,本领域的技术人员在阅读上述描述时将会想到该变型和修改,并且该变型和修改并未在现有技术中公开。以引用方式并入本专利申请的文献被视为本技术的整体部分,不同的是如果这些并入的文献中限定的任何术语与本说明书中明确或隐含地给出的定义相冲突,则应仅考虑本说明书中的定义。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。