1.本技术涉及三次采油技术领域,具体涉及一种聚合物干粉自动加入系统。
背景技术:
2.三次采油是用化学物质来改善油、气、水及岩石相互之间的性能,从而提高采收率的技术。而聚合物驱作是三次采油技术中一项重要技术,其是向地层中注入聚合物进行驱油的一种增产措施。在宏观上,聚合物主要靠增加驱替液粘度,来降低驱替液和被驱替液的流度比,从而扩大波及体积;在微观上,由于其具有粘弹性,因此,在流动过程中会对油膜或油滴的产生拉伸作用,从而增加了携带力,提高了微观洗油效率。
3.相关技术中,在配制聚合物母液过程中,通常采用人工手动的方式加入聚合物干粉。这种加入方式需要专员进行监控并添加,人工劳动强度大,成本较高,且作业效率较低。
4.因此,有必要研发一种可降低人工劳动强度,同时可提高作业效率的聚合物干粉加入系统。
技术实现要素:
5.针对上述问题,本技术提供了一种聚合物干粉自动加入系统,以降低人工强度和提高作业效率。本技术实施例采用如下技术方案:
6.一种聚合干粉自动加入系统,所述系统包括加料单元、输送单元和控制单元;
7.所述加料单元包括储料斗和设置在所述储料斗内的第一料位仪,所述第一料位仪用于当所述储料斗内的聚合物干粉量低于第一预设值时,向所述控制单元发送第一料位信息;
8.所述输送单元包括搬运设备、拆包机和上料器,其中,所述上料器的进口与所述拆包机的料斗连接,所述上料器的出口与所述储料斗连接;所述搬运设备用于在加料时将所述聚合物干粉包搬运至所述拆包机的切刀处;所述拆包机用于对所述聚合物干粉包的包装袋进行切口,并将得到的聚合物干粉供给至所述上料器;所述上料器用于将所述聚合物干粉输送给所述储料斗;
9.所述控制单元用于在接收到所述第一料位信息后,向所述输送单元发送启动信息,所述启动信息用于指示加料过程的启动。
10.可选地,所述系统还包括卸载单元,所述输送单元还包括传送装置;
11.所述卸载单元包括设置起吊组件、吊具和托盘;
12.所述吊具用于对放置有聚合物干粉包的托盘进行固定;
13.所述起吊组件用于将固定有所述托盘的吊具起吊至预设高度,并将所述托盘放置到所述传送装置上;
14.所述传送装置用于将所述托盘传送至投放区。
15.可选地,所述托盘具有至少两个贯穿所述托盘的第一侧面和第二侧面的第一插接孔,其中,所述第一侧面和所述第二侧面相对设置;
16.所述吊具包括相互平行的上固定部和下固定部,以及侧固定部;所述侧固定部的上下两端分别与所述上固定部和所述下固定部连接,且所述侧固定部垂直于所述上固定部和所述下固定部;所述上固定部、所述下固定部和所述侧固定部之间形成的空间用于容纳放置在托盘上的聚合物干粉包;所述下固定部包括至少两个相互平行的条状插接部,每个所述插接部适于与一个所述第一插接孔进行插接。
17.可选地,所述起吊组件包括可伸缩臂和设置在所述可伸缩臂的自由端上的吊钩;
18.所述上固定部为多个杆件所构成的三角结构,其中,一个所述杆件与所述侧固定部连接,且与所述侧固定部连接的杆件所对的三角形的顶点处设有一个与所述吊钩适配的吊环。
19.可选地,所述传送装置包括折叠式第一传送装置和固定式第二传送装置;
20.所述第一传送装置用于将来自所述起吊组件的托盘输送给所述第二传送装置;
21.所述第二传送装置用于在加料时将来自所述第一传送装置的托盘传送至所述投放区。
22.可选地,所述第二传送装置还用于在不加料时对放置有聚合物干粉包的托盘进行储存。
23.可选地,所述输送单元包括多个所述传送装置和设置在多个所述传送装置之间的移载机;
24.所述移载机用于在所述多个传送装置之间转移所述托盘。
25.可选地,所述搬运设备包括摄像头、吸盘和机械抓手;
26.所述摄像头用于对待搬运的聚合物干粉包进行识别定位;
27.所述吸盘用于将所述聚合物干粉包吸取至预设高度;
28.所述机械抓手用于在所述吸盘将所述聚合物干粉包吸取至预设高度的同时,抓取所述聚合物干粉包,并将所述聚合物干粉包投送至所述拆包机的切刀处。
29.可选地,所述系统还包括废袋回收单元;
30.所述废袋回收单元包括第一传送带、第二传送带、位于所述第一传送带和所述第二传送带之间打包机和位于所述第二传送带传送末端的废袋收集箱;
31.所述机械抓手还用于将拆解下来的包装袋进行铺平整理,并将铺平整理后的包装袋放到所述第一传送带上;
32.所述第一传送带用于将批量的铺平整理后的包装袋传送至所述打包机;
33.所述打包机用于对来自所述第一传送带的包装袋进行捆扎打包;
34.所述第二传送带用于将捆扎打包后的包装袋输送到所述废袋收集箱内;
35.所述废袋收集箱用于对打包后的包装袋进行收集。
36.可选地,所述系统还包括空盘回收单元;
37.所述空盘回收单元包括叠盘机和第二传送带;
38.所述叠盘机用于批量地对空托盘进行收集,并将收集的空托盘运移至所述第三传送带;
39.所述第三传送带用于将来自所述叠盘机的空托盘输送至所述系统的外部。
40.本技术实施例的有益效果至少在于:
41.本技术公开了一种聚合物干粉自动加入系统,该系统包括加料单元、输送单元和
控制单元,其中,加料单元包括储料斗和设置在储料斗内的第一料位仪,输送单元包括搬运设备、拆包机和上料器。当储料斗内的聚合物干粉量过低时,控制单元会根据料位信息去控制搬运设备将聚合物干粉包搬运至拆包机的切刀处,然后拆包机对聚合物干粉包的包装袋进行切口,并将得到的聚合物干粉供给至上料器,最后上料器将聚合物干粉输送给储料斗,以供生产。利用上述整个系统,实现了聚合物干粉的自动加入,避免了人工破袋所可能出现的划伤等风险,大大减少了人工参与,从而有效地降低了人工强度,同时也提高了作业效率。
附图说明
42.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
43.图1为本技术一个实施例提供的聚合干粉自动加入系统的示意图;
44.图2为本技术另一实施例提供的聚合干粉自动加入系统的示意图;
45.图3为本技术一个实施例提供的吊具和托盘的示意图;
46.图4为本技术另一实施例提供的聚合干粉自动加入系统的示意图。
47.其中,附图标记分别表示:
48.1-加料单元;11-储料斗;
49.2-输送单元;21-搬运设备;22-拆包机;23-上料器;24-传送装置;241-第一传送装置;242-第二传送装置;25-移载机;
50.3-控制单元;
51.4-卸载单元;41-起吊组件;411-可伸缩臂;412-吊钩;42-吊具;421-上固定部;422-下固定部;4221-插接部;42211-插接头;423-侧固定部;424-吊环;43-托盘;431-第一插接孔;432-第二插接孔;
52.5-废袋回收单元;51-第一传送带;52-第二传送带;53-打包机;54-废袋收集箱;
53.6-空盘回收单元;61-叠盘机;62-第三传送带。
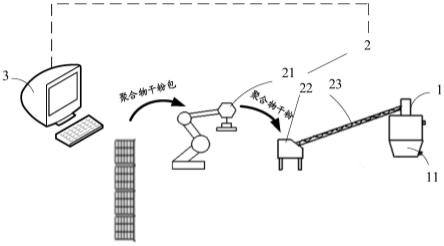
具体实施方式
54.为了使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术作进一步地详细描述,显然,所描述的实施例只是本技术一部份实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本技术保护的范围。
55.在本技术实施例中,术语“第一”、“第二”和“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。术语“多个”指两个或两个以上,除非另有明确的限定。
56.在三次采油技术领域内,往往需要进行聚合物驱作来实现增产。但相关技术中,在配制聚合物母液过程中,通常采用人工手动的方式加入聚合物干粉。这种加入方式需要专员进行监控并添加,人工劳动强度大,成本较高,且作业效率较低。
57.为解决上述技术问题,本技术提供了一种聚合物干粉自动加入系统,如图1所示,
该系统包括加料单元1、输送单元2和控制单元3。
58.其中,加料单元1包括储料斗11和设置在储料斗11内的第一料位仪(图中未示出),该第一料位仪用于当储料斗11内的聚合物干粉量低于第一预设值时,向控制单元3发送第一料位信息,以指示控制单元3在储料斗11内的聚合物干粉量过低时,对输送单元2进行控制,实现聚合物干粉的自动加入。
59.作为一种示例,加料单元1还可以包括设置在储料斗11内的第二料位仪(图中未示出),该第二料位仪用于当储料斗11内的聚合物干粉量高于第二预设值时,向控制单元3发送第二料位信息,以指示控制单元3在储料斗11内的聚合物干粉量足量时,对输送单元2进行控制,以停止聚合物干粉的加入。
60.通过第一料位仪和第二料位仪对储料斗11内的聚合物干粉量的实时监控,可以在干粉量过少时,及时地指示控制单元3去控制输送单元2开始加料;并在干粉量足够时,指示控制单元3去控制输送单元2停止加料,从而实现了启动加料和停止加料的全自动化。
61.如图1所示,输送单元2包括搬运设备21、拆包机22和上料器23,其中上料器23的进口与拆包机22的料斗连接,上料器23的出口与储料斗11连接,通过上料器23的桥梁作用,可将聚合物干粉从拆包机22的料斗转移至储料斗11内。
62.搬运设备21用于将聚合物干粉包搬运至拆包机22的切刀处,进而拆包机22可以对聚合物干粉包的包装袋进行切口,然后将得到的聚合物干粉供给至上料器23,进而上料器23将聚合物干粉输送给储料斗11,以使储料斗11内的聚合物干粉量达到作业需求。
63.拆包机22可选用本领域常见的拆包机。拆包机的切刀可以呈“井”字型,从而可以很好地对包装袋进行切口。拆包机的切刀可选用钨钢刀,钨钢刀切削性能较好,且使用寿命较长。
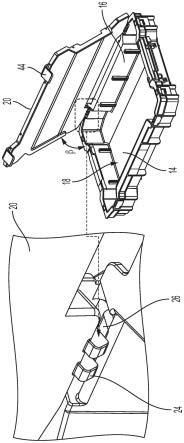
64.上料器23可选用本领域常见的螺旋式上料机。
65.控制单元3在接收到第一料位信息后,向输送单元2发送启动信息,该启动信息用于指示加料过程的启动,从而输送单元2的各个设备开始执行各自的任务,也即搬运设备21开始搬运聚合物干粉包,拆包机22开始对聚合物包的包装袋进行切口,上料器23开始向储料斗11输送聚合物干粉。而控制单元3在接收到第二料位信息后,向输送单元2发送终止信息,该终止信息用于指示终止聚合物干粉的添加,从而输送单元2的各个设备停止各自的加料任务,也即搬运设备21停止对聚合物干粉包的搬运,拆包机22停止对聚合物包的包装袋进行切口,上料器23停止向储料斗11输送聚合物干粉。
66.通过上述整个系统,实现了聚合物干粉的自动加入,避免了人工破袋所可能出现的划伤等风险,大大减少了人工参与,从而有效地降低了人工强度,同时也提高了作业效率。
67.为了提高从运输工具上搬卸聚合物干粉包的效率,以及保证搬卸过程的稳定性,作为一种示例,本技术的聚合干粉自动加入系统还可包括卸载单元4,输送单元4还可包括传送装置24。如图2所示,卸载单元4包括起吊组件41、吊具42和托盘43。托盘43作为聚合物干粉包的运载体,在运输过程中,将批量聚合物干粉包分装至多个托盘43内,然后利用如大货车、卡车等运输工具将这些放置有聚合物干粉包的托盘43运输至指定地点,这种以托盘为载体进行搬运的形式可以有效节省聚合物干粉包的占地空间,同时可以提高作业效率。吊具42用于对放置有聚合物干粉包的托盘43进行固定,以保证搬卸时的稳定性。起吊组件
41用于将固定有托盘43的吊具42起吊至预设高度,并将托盘43放置在传送装置24上,进而传送装置24可将放置有聚合物干粉包的托盘43传送至投放区,以在需要加料时供搬运设备21进行搬运。
68.可选地,多个聚合物干粉包可以采用五花垛的形式堆叠在一个托盘43内,这样可在保证堆叠体的稳定性的前提下,使一个托盘43可以放置更多的聚合物干粉包,同时采用五花垛这种堆叠方式,在后续的加料过程中,会更加便于搬运设备21进行搬运。
69.如图3所示,作为一种示例,吊具42可以包括相互平行的上固定部421和下固定部422,以及侧固定部423。其中,侧固定部423的上下两端分别与上固定部421和下固定部422连接,且侧固定部423垂直于上固定部421和下固定部422,从而在上固定部421、下固定部422和侧固定部423之间形成一个夹持空间,该夹持空间用于容纳放置在托盘43上的聚合物干粉包。
70.为将托盘43稳定地固定在吊具42上,如图3所示,托盘43具有至少两个贯穿托盘43的第一侧面和第二侧面的第一插接孔431,其中,第一侧面和第二侧面相对设置;吊具42的下固定部422包括至少两个相互平行的条状插接部4221,每个插接部4221适于与一个第一插接孔431进行插接,从而通过插接部4221和第一插接孔431的配合可以实现托盘43与吊具42的牢固连接。
71.为实现插接部4221与第一插接孔431的顺利配合,作为一种示例,如图3所示,每个插接部4221朝外的端部上设有圆尖状的插接头42211,从而使插接部4221较为容易地插接进第一插接孔431内。
72.可选地,如图3所示,托盘43还可以具有至少两个贯穿托盘43的第三侧面上和第四侧面的第二插接孔432,其中,第三侧面和第四侧面相对设置。需说明的是,这里的托盘43为具有一定厚度和足够强度的承载体,上述第一侧面、第二侧面、第三侧面和第四侧面分别是该承载体的四个侧面。通过这样设置,无论起吊组件41位于托盘43的任何一侧,均可以实现对放置有聚合物干粉包的托盘43的吊装,十分地灵活。
73.为满足对吊具强度的不同需求,吊具42的下固定部422可以包括三个或者三个以上的相互平行的条状插接部4221,并在托盘的侧面上设置相应的第一插接孔431或第二插接孔432,也就是说,可以根据实际强度需求,合理地设置下固定部的插接部4221的数量。
74.可以理解的是,当插接部431嵌入至托盘43侧面上的第一插接孔431或第二插接孔432时,放置在托盘43上的聚合物干粉包能够顺势地被容纳入吊具42的三个固定部所形成的夹持空间内,且此时,上固定部421、下固定部422和侧固定部423均能与被夹持的放置有聚合物干粉包的托盘43紧密贴合,从而实现托盘的牢靠固定。
75.为实现吊具42的吊装,作为一种示例,如图2所示,起吊组件41包括可伸缩臂411和设置在可伸缩臂411的自由端上的吊钩412。如图3所示,吊具42的上固定部421为多个杆件所构成的三角结构,多个杆件中的一个杆件与侧固定部连接,且与侧固定部连接的杆件所对的三角形顶点处设有一个与吊钩412适配的吊环424,从而起吊组件41可以依靠可伸缩臂411来调整吊钩412与待吊取物即吊具42的远近,当锁定目标后可以通过吊钩412与吊环424的配合来实现吊具42的吊装。
76.可选地,如图3所示,吊具42的侧固定部423为多个杆件形成方形框架结构,且在该方形框架的中央还设置有相互交叉且垂直的两个加强杆件,每个加强杆件的两端分别与方
形框架的一组平行边相连接,可以理解的是,这两个加强杆件的两端分别连接的是不同组的平行边。
77.为节约设备成本,作为一种示例,起吊组件41可以直接设置在运输放置有聚合物干粉包的托盘43的运输工具上,这样当运输工具到达指定地点后,可以直接利用运输工具自带的起吊组件41来吊装托盘43,而不需要单独设计专门用来吊装的起吊装置。
78.应当理解的是,聚合干粉自动加入系统的加料单元1和输送单元2设置在库房内,运输工具到达的指定地点指的是库房的门口。为高效地将从运输工具上卸载下来的聚合物干粉包传送至投放区,作为一种示例,如图4所示,传送装置24可以包括可折叠式第一传送装置241和固定式第二传送装置242。
79.第一传送装置241用于将来自起吊组件41的托盘43输送给第二传送装置242,第二传送装置242用于在加料时将来自第一传送装置241的托盘43传送至投放区。也即是,起吊组件41将固定有托盘43的吊具42起吊至预设高度后,将托盘43和其上的聚合物干粉包整体放置在第一传送装置241上,然后第一传送装置241将托盘43传送给第二传送装置242。当需要加料时,第二传送装置242将放置有聚合物干粉包的托盘43持续地输送至投放区。
80.下面对可折叠式第一传送装置241和固定式第二传送装置242的工作原理进行说明:
81.第一传送装置241是可折叠的,使用起来较为方便灵活,可选用本领域内常见的折叠式输送机。当需要将运输工具上的聚合物干粉包转移至加料单元1和输送单元2所在的库房内部时,可使折叠式第一传送装置241向外延展从而伸出库房,以方便起吊组件41将吊装起来的放置有聚合物干粉包的托盘43放置到第一传送装置241上。当不需要从运输工具上卸载托盘43时,第一传送装置241处于非延展的状态,此时,第一传送装置241整体处于库房内部。也就是说,在需要进行作业时,第一传送装置241才会进行延展而伸出至库房外部,否则,第一传送装置241整体处于库房内部,这样可有效地避免装置受到日晒风吹雨淋等自然环境的侵蚀,从而可延长装置的使用寿命,同时也可以节省装置的占地面积。
82.作为一种示例,可以在库房门口设置监控摄像头,当摄像头检测到装载有托盘43的运输工具停靠在库房门口时,向系统的控制单元2发送控制指令,以使控制单元2控制第一传送装置241向外进行延展,从而实现自动控制,降低人工劳动强度。
83.固定式第二传送装置242设置在库房内部,其可以由机架、输送链/辊、张紧装置、传动装置等组件组成,主要采用摩擦驱动连续方式来运输物料,装置整体重量较重,较为稳定,从而可平稳地对放置有聚合物干粉包的托盘43进行传送。当需要加料时,第二传送装置242处于工作状态,连续地向搬运设备21输送聚合物干粉包。
84.作为一种示例,当不需要进行加料时,第二传送装置242可以作为载体对放置有聚合物干粉报的托盘43进行临时储存,也就是说,从运输工具上卸载下来的放置有满足作业需求的聚合物干粉包的多个托盘43可以暂时储存在第二传送装置242上,当需要加料时只需启动第二传送装置242就可直接对托盘43进行传送,无需再将托盘43转移到第二传送装置242上,十分地方便,作业效率较高。并且,利用第二传送装置242直接对放置有聚合物干粉包的托盘43进行储存可有效地节约占地空间,尤其适用于库房空间有限的情况。此外,整个传送过程中,聚合物干粉包以托盘43为载体进行传送,提高了传送效率,同时也可以节省占地面积。
85.可以理解的是,第一传送装置241和第二传送装置242的相对位置应当利于物料在两者之间进行传输,比如,第二传送装置242设置在紧邻第一传送装置241的物料传送方向的后方位置处,从而托盘43可以顺利地从第一传送装置241过渡到第二传送装置242上。
86.应当理解的是,第一传送装置241只是起到将放置有聚合物干粉包的托盘输送给第二传送装置242的中间过渡作用,因此,相比于第二传送装置242,对第一传送装置241的强度要相对较低。
87.通过采用可折叠式第一传送装置和固定式第二传送装置的组合,以及托盘承载方式来对聚合物干粉包进行传送,既能提高传送效率,又能有效地节约聚合物干粉包的占地面积。
88.为提高传送效率,作为一种示例,如图4所示,输送单元2可以包括多个传送装置24,多个传送装置24同时作业可以有效提高传送效率。为实现在多个传送装置24之间转移托盘,可以在多个传送装置24之间设置移栽机25,该移栽机25可改变物品的行进方向,主要对托盘43进行90
°
旋转。移栽机25可选用本领域内常见的移栽机型号。
89.作为一种示例,搬运设备21可以包括摄像头、吸盘和机械抓手。摄像头用于对待搬运的聚合物干粉包进行识别定位,以使吸盘和机械抓手能够准确锁定聚合物干粉包。吸盘用于将聚合物干粉包吸取至预设高度,机械抓手用于在吸盘将聚合物干粉包吸取至预设高度的同时,抓取聚合物干粉包,并将聚合物干粉包投送至拆包机22的切刀处,以使拆包机22对聚合物干粉包的包装袋进行切口,包装袋被切口后,搬运设备21的机械抓手抖动包装袋,以使袋内的干粉能够完全地落入拆包机22的料斗内。需说明的是,在作业过程中,搬运设备21的吸盘先将聚合物干粉包吸起来,但是考虑到托盘43和其上放置的聚合物干粉包的总重较大,单凭吸盘的吸力可能难以保证聚合干粉包搬运过程中的稳定性,这时再利用机械抓手对已经被吸取到一定高度的聚合物干粉进行抓取可以保证稳定性。也就是说,在聚合物干粉包的搬运过程中,是依靠搬运设备21的吸盘和机械抓手的共同作用来保证搬运的稳定性。其中,为便于搬运,第二传送装置242可以将放置有聚合物干粉包的托盘43输送至搬运设备21的工作区域内,从而搬运设备21的吸盘可以对聚合物干粉包进行吸取。
90.为了实现回收利用,作为一种示例,如图4所示,聚合干粉自动加入系统还可包括废袋回收单元5。该废袋回收单元5包括第一传送带51、第二传送带52、位于第一传送带51和第二传送带52之间的打包机53和位于第二传送带52传送末端的废袋收集箱54。搬运设备21的机械抓手将包装袋内的聚合物干粉充分地抖落至拆包机22的料斗内后,再将空包装袋进行铺平整理并放在第一传送带51上。当第一传送带51上的包装袋达到一定批量后,第一传送带51将这些包装袋一起传送到打包机53处,打包机53对这些包装袋进行捆扎打包。第二传送带52将捆扎打包后的包装袋输送到废袋收集箱54内,进而废袋收集箱54对成捆的包装袋进行收集,以便后续重复利用。
91.可以理解的是,第一传送带51和打包机53两者之间的相对位置是利于进行包装袋传输的,比如两者设置在同一条直线上。同时由于对两个传送带的强度要求不高,因此,两者可选用本领域内常见的皮带式传送带。
92.为防止空托盘在库房内发生堆积,作为一种示例,如图4所示,聚合干粉自动加入系统还可包括空盘回收单元6,以及时地对空托盘进行处理。
93.该空盘回收单元6包括叠盘机61和第二传送带62。叠盘机61用于批量地对空托盘
进行收集,并将收集的空托盘运移至第二传送带62。第二传送带62再将空托盘输送至系统的外部,从而可以及时且高效地对空托盘进行收集,防止其在库房内堆积。
94.考虑到在整个加料过程中,没有包装袋密封的聚合物干粉很容易飘散在空气中,一是这些漂浮的干粉易被人体吸入,会对人体健康造成影响;二是这样导致一部分聚合物干粉没有被利用,造成了一定浪费。为解决上述问题,作为一种示例,聚合干粉自动加入系统还可以包括除尘单元(图中未示出),该除尘单元可对空气中漂浮的聚合物干粉进行吸附,并将吸附的聚合物干粉投放至储料斗11内,从而既能防止干粉被吸入人体而影响健康,还能提高聚合物干粉的利用率。
95.作为一种示例,除尘单元可以包括负压吸尘装置(图中未示出),该负压吸尘装置可以利用负压对空气中漂浮的干粉进行吸附。
96.下面对本技术的聚合干粉自动加入系统的使用方法进行说明,当然该方法仅是示例式的,并不对本技术构成实质性限定。
97.该方法主要包括以下几个环节:
98.入库环节:运载放置有聚合物干粉包的托盘的运输设备停靠在库房门口,库门自动打开,库房内的第一传送装置向外延展从而伸出库房。利用起吊组件和吊具将放置有聚合物干粉包的托盘陆续放到第一传送装置,第一传送装置将这些托盘传送给第二传送装置。第二传送装置对这些放置有聚合物干粉包的托盘进行临时储存,以待后续的加料。
99.同时为简化说明,下面出现的“托盘”均指的是上面放置有聚合物干粉包的托盘,而“空托盘”指的是上面的聚合物干粉包已经全部被卸载掉的托盘。
100.搬运环节:当储料斗内的聚合物干粉量过低时,第一料位仪会向控制单元发出第一料位信息,进而控制单元向输送单元发送指示开始加料的启动信息。当加料时,第二传送装置将其上的托盘依次输送到搬运设备的搬运区,以供搬运设备进行搬运。搬运设备先利用摄像头来对聚合物干粉包进行识别和定位,然后通过吸盘将托盘上的聚合物干粉包吸取至预设高度后,再使用机械抓手抓紧该聚合物干粉包,最后在吸盘和机械抓手的共同作用下,将聚合物干粉包送至拆包机的切刀处。
101.破袋环节:拆包机的切刀将聚合物包的包装袋切开多个长口子后,搬运设备的机械抓手抖动包装袋,从而使得内部的聚合物干粉能够完全地落入至拆包机的料斗内。
102.输料环节:上料器将拆包机料斗内的聚合物干粉输送给储料斗,当储料斗内的聚合物干粉量足够时,第二料位仪会向控制单元发送第二料位信息。控制单元在接收到第二料位信息后,向输送单元发送指示终止聚合物干粉的添加的终止信息。基于该终止信息,第二传送装置停止对托盘的输送,搬运设备停止对聚合物干粉包的搬运,拆包机停止对聚合物包的包装袋进行切口,上料器停止向储料斗输送聚合物干粉。
103.废袋回收环节:搬运设备的机械抓手抖动包装袋使袋内的干粉充分落入拆包机的料斗内后,再将空包装袋进行铺平整理放在第一传送带上。当第一传送带上的包装袋达到一定批量后,第一传送带这些包装袋一起传送到打包机处。打包机对这些包装袋进行捆扎打包,并传送给第二传送带,第二传送带将捆扎打包后的包装袋输送到废袋收集箱内,进而废袋收集箱对成捆的包装袋进行收集,以便后续重复利用。
104.空托盘收集环节:当托盘上的聚合物干粉包全部被卸载完后,利用叠盘机对空托盘进行收集,当叠盘机收集的空托盘叠到一定层数后,叠盘机将这些空托盘一起运移至第
三传送带。第三传送带将这些空托盘输送至系统的外部,从而可以及时且高效地对空托盘进行收集,防止其在库房内堆积。
105.除尘环节:在加料过程中,除尘单元的负压吸尘装置对加料时产生的粉尘进行吸附,并将吸附的粉尘投入到储料斗内,这样既能防止粉尘被吸入人体而对健康造成影响,又能避免对聚合物干粉的浪费。
106.本技术公开了一种聚合物干粉自动加入系统,该系统包括加料单元、输送单元和控制单元,其中,加料单元包括储料斗和设置在储料斗内的第一料位仪,输送单元包括搬运设备、拆包机和上料器。当储料斗内的聚合物干粉量过低时,控制单元会根据料位信息去控制搬运设备将聚合物干粉包搬运至拆包机的切刀处,然后拆包机对聚合物干粉包进行拆解,并将聚合物干粉供给至上料器,最后上料器将聚合物干粉输送给储料斗,以供生产。利用上述整个系统,实现了聚合物干粉的自动加入,避免了人工破袋所可能出现的划伤等风险,大大减少了人工参与,从而有效地降低了人工强度,同时也提高了作业效率。
107.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。