1.本发明涉及车辆控制领域,特别涉及一种激光雷达及其测量运动速度的方法和装置、控制系统。
背景技术:
2.自动驾驶是未来将对人类生活产生重大影响的方向。现阶段的一个研究重点是车辆的自动驾驶。很多公司都投入大量资源在这一领域投入大量研发资源。自动驾驶系统是通过感知层的传感器获取路况信息,进而由决策层对感知层构建的信息进行分析处理,最终通过执行层进行车辆后续行为控制。其中,激光雷达因为测远能力强、分辨率高、探测精度和准度高,作为自动驾驶的感知传感器得到了广泛应用。
3.在自动驾驶的过程中,系统探测到各个目标之后,还需要准确的跟踪这些目标,得到这些目标的运动参数和轨迹,进而选择准确的驾驶决策。要准确跟踪目标,系统需要获得包括目标的位置、速度、加速度等在内的各种参数。
4.现有激光雷达测距所采用的一种测量方法为飞行时间法(time of flight,tof)。飞行时间法测距具有发射激光脉冲持续时间短、瞬时功率高,能够同时获得较强的测远能力和较高的测量频率,是目前市场上主流激光雷达所采用的测距方法。采用飞行时间法进行测距的激光雷达被称为tof雷达。
5.采用tof雷达的自动驾驶系统,需要结合多帧数据才能进行目标感知和目标追踪。针对某一时刻所获得的一帧扫描数据,自动驾驶系统先检测移动目标,并确定各个移动目标的位置;然后对不同时刻的多帧扫描数据进行分析,进而得到移动目标的运动状态和运动轨迹。在多目标跟踪的情况下,自动驾驶系统还需要对相邻两帧扫描数据中的每一个目标进行配对,需要解决新目标出现、老目标消失的问题,可能存在虚警和漏检等问题。而且多帧扫描数据的探测和处理时间都需要耗费相对较长的时间,对于突然出现的紧急状况容易出现决策和避险时间不足的问题。
6.激光雷达测距的另一种测量方法是采用调频连续波(frequency modulated continuous wave,fmcw)进行相干探测,这种激光雷达被称为fmcw激光雷达。fmcw激光雷达发射调频连续激光,通过回波信号的延时获得差拍信号频率,进而计算出目标的距离和速度。图1示出了fmcw激光雷达的结构框图,图2示出了fmcw激光雷达的探测原理。光源11产生高频调频光,通过分光器将一部分光线经过放大后传输至发射端12,发射至目标空间,被障碍物反射的回波光被雷达接收器14接收,另一部分光线作为本振光,耦合至混频器13;所述混频器13将所述本振光与接收器14接收的回波光进行混频并滤波;经混频和滤波后,探测器15得到差频信号;所述差频信号经采样器16(如adc)传输至信号处理器17处理。
7.参考图2,差频信号经采样处理后,可分别获得回波光与本振光下降沿的频率差f1和上升沿的频率差f2,然后根据以下公式计算出障碍物的距离z和速度v。
8.[0009][0010]
fmcw激光雷达能够通过一次探测同时获得距离和速度信息。而且fmcw激光雷达具有抗干扰能力更强的优势,因此fmcw激光雷达是自动驾驶感知传感器的新方向。
[0011]
但是fmcw激光雷达测得的速度是待测目标相对于激光雷达的径向速率,这是不准确的。因为速度是一个矢量。如图3所示,fmcw激光雷达所测得的径向速率vr是待测目标实际速度在待测目标与雷达连线上的投影大小,即vr=vcosα,其中α表示待测目标实际运动方向与待测目标和雷达连线之间的夹角。如果目标物实际速度方向是垂直于fmcw激光雷达(即汽车)的运动方向(即横向速度),即α接近于90
°
,那么fmcw激光雷达所测得的径向速率vr就非常小,并不能准确的反映待测目标的实际运动情况。但是在自动驾驶的应用中,因为横向速度引起的紧急情况占90%以上,闯红灯的汽车、转向的车辆、闯入街道的行人,都需要横向速度才能做出规避危险的决策。
[0012]
因此亟需一种更准确的运动速度的测量方法以获得待测目标的矢量速度。
技术实现要素:
[0013]
本发明解决的问题是如何获得待测目标的矢量速度。
[0014]
为解决上述问题,本发明提供一种激光雷达测量运动速度的方法,包括:
[0015]
提供m个收发模块,其中,m≧2;通过第i收发模块发射第j探测光束并接收第j回波光束,所述第j探测光束被反射后形成所述第j回波光束,其中,1≦i≦m,1≦j≦ni;根据所述第j回波光束,获得第(i,j)组探测数据,所述第(i,j)组探测数据包括:第(i,j)位置信息和第(i,j)径向速率;至少根据第(a,aj)组探测数据和第(b,bj)组探测数据,并结合第a收发模块的位置信息和第b收发模块的位置信息,获得待测目标的运动速度,其中,1≦a≦m,1≦b≦m,1≦aj≦na,1≦bj≦nb,且a≠b,第a收发模块和第b收发模块之间具有预设距离。
[0016]
可选的,获得所述待测目标的运动速度之前,所述方法还包括:判断所述第(a,aj)组探测数据和所述第(b,bj)组探测数据是否与同一待测目标相对应。
[0017]
可选的,判断所述第(a,aj)组探测数据和所述第(b,bj)组探测数据是否与同一待测目标相对应的步骤包括:根据第a收发模块的位置信息和第b收发模块的位置信息,进行坐标转换,使所述第(a,aj)组探测数据中的第(a,aj)位置信息和所述第(b,bj)组探测数据中的第(b,bj)位置信息转换至同一坐标系下,获得第(a,aj)转换位置信息和第(b,bj)转换位置信息;比较所述第(a,aj)转换位置信息和所述第(b,bj)转换位置信息,在第(a,aj)转换位置信息和第(b,bj)转换位置信息的差值在预设范围内时,判断第(a,aj)组探测数据和第(b,bj)组探测数据与同一待测目标相对应。
[0018]
可选的,所述运动速度包括:运动速率和运动方向角;获得所述待测目标的运动速度的步骤包括:根据第(i,j)组探测数据中的第(i,j)位置信息和所述第i收发模块的位置信息,获得第(i,j)径向方向角;至少根据第(a,aj)径向速率、第(a,aj)径向方向角、第(b,bj)径向速率和第(b,bj)径向方向角,获得所述运动速率和运动方向角。
[0019]
可选的,通过第i收发模块发射第j探测光束的步骤包括:获得第(i,j)投影角,所述第(i,j)投影角为第i收发模块发射的第j探测光束与预设平面的夹角;获得所述待测目标的运动速度的步骤中,结合所述第(i,j)投影角,获得预设平面内的运动速度。
[0020]
可选的,获得预设平面内的运动速度的步骤包括:根据所述第(i,j)径向速率和所述第(i,j)投影角,获得第(i,j)投影径向速率,所述第(i,j)投影径向速率为所述待测目标在预设平面内的径向的运动速度;根据所述第(a,aj)位置信息、所述第(b,bj)位置信息、所述第(a,aj)投影径向速率和所述第(b,bj)投影径向速率,结合所述第a收发模块和所述第b收发模块的位置信息,获得所述待测目标在所述预设平面内的运动速度。
[0021]
可选的,所述预设平面为水平面;或者,所述预设平面为所述激光雷达的垂直视场角大小为0
°
的平面;或者,所述激光雷达具有旋转轴,所述预设平面为垂直所述旋转轴的平面。
[0022]
可选的,通过第i收发模块发射第j探测光束的步骤包括:通过所述第i收发模块发射ni束探测光束进行一帧扫描,以获得所述第i收发模块的一帧扫描数据,所述第i收发模块的一帧扫描数据包括:ni组探测数据。
[0023]
可选的,获得所述待测目标的运动速度的步骤还包括:根据多组探测数据,进行余弦曲线拟合,获得所述待测目标的运动速度。
[0024]
可选的,获得第i收发模块的一帧扫描数据之后,进行余弦曲线拟合之前,获得所述待测目标的运动速度的步骤还包括:判断所述多组探测数据是否与同一待测目标相对应;在判断所述多组探测数据是与同一待测目标相对应时,根据所述多组探测数据进行余弦曲线拟合。
[0025]
可选的,提供m个收发模块的步骤包括:提供一个激光雷达,所述激光雷达包括所述m个收发模块;或者,提供m个收发模块的步骤包括:提供多个激光雷达,所述多个激光雷达包括所述m个收发模块。
[0026]
相应的,本发明还提供一种激光雷达测量运动速度的装置,包括:
[0027]
m个收发模块,其中,m≧2;第i收发模块发射第j探测光束并接收第j回波光束,所述第j探测光束被反射后形成所述第j回波光束,其中,1≦i≦m,1≦j≦ni;数据模块,所述数据模块适宜于根据所述第j回波光束,获得第(i,j)组探测数据,所述第(i,j)组探测数据包括:第(i,j)位置信息和第(i,j)径向速率;速度模块,所述速度模块适宜于至少根据第(a,aj)组探测数据和第(b,bj)组探测数据,并结合第a收发模块的位置信息和第b收发模块的位置信息,获得待测目标的运动速度,其中,1≦a≦m,1≦b≦m,1≦aj≦na,1≦bj≦nb,且a≠b,第a收发模块和第b收发模块之间具有预设距离。
[0028]
可选的,还包括:甄别模块,所述甄别模块适宜于判断所述第(a,aj)组探测数据和所述第(b,bj)组探测数据是否与同一待测目标相对应。
[0029]
可选的,所述甄别模块包括:转换单元,所述转换单元适宜于根据第a收发模块的位置信息和第b收发模块的位置信息,进行坐标转换,使所述第(a,aj)组探测数据中的第(a,aj)位置信息和所述第(b,bj)组探测数据中的第(b,bj)位置信息转换至同一坐标系下,获得第(a,aj)转换位置信息和第(b,bj)转换位置信息;比较单元,所述比较单元适宜于比较所述第(a,aj)转换位置信息和所述第(b,bj)转换位置信息,在第(a,aj)转换位置信息和第(b,bj)转换位置信息的差值在预设范围内时,判断第(a,aj)组探测数据和第(b,bj)组探测数据与同一待测目标相对应。
[0030]
可选的,所述运动速度包括:运动速率和运动方向角;所述速度模块包括:方向角单元,所述方向角单元适宜于根据第(i,j)组探测数据中的第(i,j)位置信息和所述第i收
发模块的位置信息,获得第(i,j)径向方向角;计算单元,所述计算单元适宜于至少根据第(a,aj)径向速率、第(a,aj)径向方向角、第(b,bj)径向速率和第(b,bj)径向方向角,获得所述运动速率和运动方向角。
[0031]
可选的,所述速度模块还适宜于从第i收发模块获得第(i,j)投影角,所述第(i,j)投影角为第i收发模块发射的第j探测光束与预设平面的夹角;并结合所述第(i,j)投影角,获得预设平面内的运动速度。
[0032]
可选的,所述速度模块还包括:投影单元,所述投影单元适宜于根据所述第(i,j)径向速率和所述第(i,j)投影角,获得第(i,j)投影径向速率,所述第(i,j)投影径向速率为所述待测目标在预设平面内的径向的运动速度;所述速度模块适宜于根据所述第(a,aj)位置信息、所述第(b,bj)位置信息、所述第(a,aj)投影径向速率和所述第(b,bj)投影径向速率,结合所述第a收发模块和所述第b收发模块的位置信息,获得所述待测目标在预设平面内的运动速度。
[0033]
可选的,所述预设平面为水平面;或者,所述预设平面为垂直视场角大小为0
°
的平面;或者,所述激光雷达具有旋转轴,所述预设平面为垂直所述旋转轴的平面。
[0034]
可选的,所述第i收发模块发射ni束探测光束进行一帧扫描;所述数据模块适宜于获得所述第i收发模块的一帧扫描数据,所述第i收发模块的一帧扫描数据包括:ni组探测数据。
[0035]
可选的,所述速度模块还包括:拟合单元,所述拟合单元适宜于根据所述多组探测数据,进行余弦曲线拟合,获得所述待测目标的运动速度。
[0036]
可选的,在甄别模块判断所述多组探测数据是与同一待测目标相对应时,所述拟合单元根据所述多组探测数据进行余弦曲线拟合。
[0037]
可选的,包括:一个激光雷达,所述激光雷达包括所述m个收发模块;或者,包括:多个激光雷达,所述多个激光雷达包括所述m个收发模块。
[0038]
此外,本发明还提供一种控制系统,所述控制系统为自动驾驶控制系统,包括:
[0039]
测量装置,所述测量装置为本发明的激光雷达测量运动速度的装置;控制装置,所述控制装置适宜于结合所述测量装置获得的运动速度控制车辆。
[0040]
与现有技术相比,本发明的技术方案具有以下优点:
[0041]
本发明技术方案通过多个收发模块分别获得探测数据,在探测数据的基础上,结合收发模块的位置信息,获得待测目标的运动速度。由于所述多个收发模块之间具有预设距离,因此所获得的运动速度为矢量速度,即所述运动速度包括运动速率和运动方向角。矢量速度的获得能够更准确的反应待测目标的实际运动情况,能够有效提高车辆控制的准确性和精度。
[0042]
本发明可选方案中,特别是针对近距离目标物,通过一帧扫描数据的获得以获得探测数据,所获得的一帧扫描数据包括一个或多个第i组探测数据,可以根据多个第i组探测数据,进行余弦曲线拟合以获得第i拟合曲线;所述运动速度可以根据多个拟合曲线获得,以提高测量精度,降低测量误差。
[0043]
本发明可选方案中,从所述收发模块可以获得相对应的探测光束的出射角度作为投影角;结合所述投影角能够获得预设平面内的运动速度,从而将三维空间的运动速度转化为预设平面内的运动速度,进而能够有效缩短处理时间,提高处理效率。特别是针对自动
驾驶领域,预设平面可以是自动驾驶更感兴趣的平面,以同时保证测量数据处理速度和测量结果对自动驾驶指导的准确性。
附图说明
[0044]
图1是fmcw激光雷达的结构框图;
[0045]
图2是fmcw激光雷达的探测原理;
[0046]
图3是激光雷达所获得径向速率和待测目标实际速度的比较示意图;
[0047]
图4是本发明激光雷达测量运动速度的方法一实施例的流程示意图;
[0048]
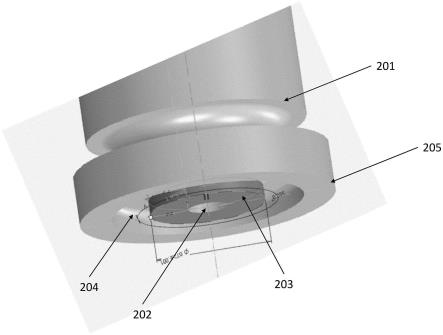
图5是图4所示激光雷达测量运动速度的方法实施例所采用激光雷达的结构示意图;
[0049]
图6是图4所示激光雷达测量运动速度的方法实施例所采激光雷达的功能框图;
[0050]
图7是图5所示激光雷达中扫描单元的光路结构示意图;
[0051]
图8是图4所示激光雷达测量运动速度的方法实施例获得待测目标的运动速度的原理示意图;
[0052]
图9是图4所示激光雷达测量运动速度的方法实施例中判断所述第(a,aj)组探测数据和所述第(b,bj)组探测数据是否与同一待测目标相对应步骤的具体流程示意图;
[0053]
图10是本发明激光雷达测量运动速度的方法另一实施例的流程示意图;
[0054]
图11是图10所示激光雷达测量运动速度的方法实施例中预设平面内的运动速度的示意图;
[0055]
图12是本发明激光雷达测量运动速度的方法再一实施例的流程示意图;
[0056]
图13是本发明激光雷达测量运动速度的装置一实施例的功能框图;
[0057]
图14是本发明激光雷达测量运动速度的装置另一实施例的功能框图;
[0058]
图15是本发明激光雷达测量运动速度的装置再一实施例的功能框图。
具体实施方式
[0059]
由背景技术可知,现有技术中的激光雷达,所测得的速度是待测目标相对于激光雷达的径向速率,难以获得所述待测目标的矢量速度。
[0060]
为解决所述技术问题,本发明提供一种激光雷达测量运动速度的方法,包括:
[0061]
提供m个收发模块,其中,m≧2;通过第i收发模块发射第j探测光束并接收第j回波光束,所述第j探测光束被反射后形成所述第j回波光束,其中,1≦i≦m,1≦j≦ni;根据所述第j回波光束,获得第(i,j)组探测数据,所述第(i,j)组探测数据包括:第(i,j)位置信息和第(i,j)径向速率;至少根据第(a,aj)组探测数据和第(b,bj)组探测数据,并结合第a收发模块的位置信息和第b收发模块的位置信息,获得待测目标的运动速度,其中,1≦a≦m,1≦b≦m,1≦aj≦na,1≦bj≦nb,且a≠b,第a收发模块和第b收发模块之间具有预设距离。
[0062]
本发明技术方案,通过多个收发模块分别获得探测数据,在探测数据的基础上,结合收发模块的位置信息,获得待测目标的运动速度。由于所述多个收发模块之间具有预设距离,因此所获得的运动速度为矢量速度,即所述运动速度包括运动速率和运动方向角。矢量速度的获得能够更准确的反应待测目标的实际运动情况,能够有效提高车辆控制的准确性和精度。
[0063]
本发明技术方案,多个收发模块分别获得探测数据,在至少两个收发模块的一帧探测数据中,各选择至少一组符合条件的探测数据,如上所述第a探测模块的第aj组探测数据和第b探测模块的第bj组探测数据,结合第a收发模块的位置信息和第b收发模块的位置信息,即可获取待测目标的运动速度;收发模块数量为3个以上时,可从3个以上的收发模块的一帧探测数据中,各选择至少一组符合条件的探测数据,结合各个收发模块的位置信息,获取待测目标的运动速度。
[0064]
为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
[0065]
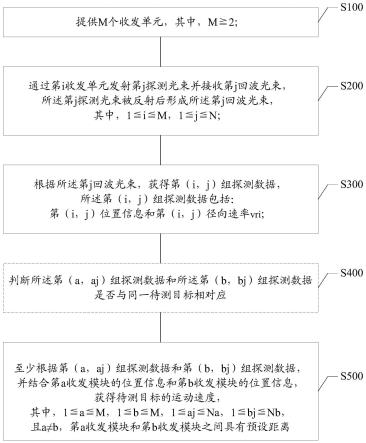
参考图4,示出了本发明激光雷达测量运动速度的方法一实施例的流程示意图。
[0066]
如图4所示,首先执行步骤s100,提供m个收发模块,其中,m≧2;之后,执行步骤s200,通过第i收发模块发射第j探测光束并接收第j回波光束,所述第j探测光束被反射后形成所述第j回波光束,其中,1≦i≦m,1≦j≦ni;接着,执行步骤s300,根据所述第j回波光束,获得第(i,j)组探测数据,所述第(i,j)组探测数据包括:第(i,j)位置信息和第(i,j)径向速率vri(如图5中所示的径向速率vr1和径向速率vr2)。
[0067]
需要说明的是,其中ni是指第i收发模块进行一帧扫描所发射探测光束的数量,即所述第i收发模块发射ni束探测光束进行一帧扫描,以获得所述第i收发模块的一帧扫描数据,所述第i收发模块的一帧扫描数据包括:ni组探测数据。
[0068]
所述方法为激光雷达测量运动速度的方法,因此本发明一些实施例中,提供m个收发模块的步骤包括:提供一个激光雷达,所述激光雷达包括所述m个收发模块。
[0069]
结合参考图5,示出了图4所示激光雷达测量运动速度的方法实施例所采用激光雷达的结构示意图。
[0070]
本发明一些实施例中,提供m个收发模块的步骤包括:提供一个激光雷达,所述激光雷达包括:m个收发模块,即提供m个收发模块的步骤中所提供的激光雷达仅包括1个光源。
[0071]
需要说明的是,图5所示的激光雷达中,所述收发模块包括扫描单元。图5示出了所述激光雷达内m个收发模块中的2个扫描单元,即扫描单元a和扫描单元b。
[0072]
还需要说明的是,本发明激光雷达测量运动速度的方法所采用的激光雷达中收发模块的数量可以为2个或2个以上的数量。本发明对所述激光雷达中收发模块的数量并不限定。
[0073]
本发明一些实施例中,所述激光雷达为调频连续波(frequency modulated continuous wave,fmcw)激光雷达。fmcw激光雷达能够通过获得待测目标的径向速率和位置信息。
[0074]
结合参考图6,图6示出了图4所示激光雷达测量运动速度的方法实施例所采用fmcw激光雷达的功能框图。
[0075]
具体的,所述fmcw激光雷达获得待测目标径向速率和位置的过程如下:调频光源110产生线性调频连续的原始光束;所述原始光束经分光单元120分光后,部分原始光束导入混频单元150作为本振光,另一部分原始光束经放大单元130放大后作为探测光束,所述探测光束经过扫描单元(如图7所示)反射至待测目标所处的三维空间;待测目标反射所述原始光束所形成的回波光束被耦合入波导后,通过分束单元140与探测光束相分离,之后传
输到混频单元150;回波光束与作为本振光进行拍频,进而由探测单元160进行光电转换;处理单元(图中未示出)根据光电转换的结果计算待测目标的径向速率和位置信息。
[0076]
所述扫描单元通过改变所述探测光束的传播方向进行二维扫描,从而获得一定范围的视场。调频光源110所产生的探测光束经波导传输至扫描单元,波导端口发出的探测光束被扫描单元偏折后出射;探测光束被待测目标反射的回波光束再通过扫描单元接收后耦合至波导,通过分束单元实现与探测光束光路的分离。其中,所述分束单元140可以包括环形器,也可以包括如耦合器等其他分光元件;所述处理单元根据本振光和回波光的差频和多普勒频移计算待测目标的径向速率和位置信息。
[0077]
需要说明的是,图6所示的fmcw激光雷达的功能框图仅为一示例。本发明其他实施例中,所述分光单元也可以设置于所述放大单元的光路下游,即所述原始光束在放大后分出部分本振光,部分输出作为探测光束。
[0078]
结合参考图7,示出了图5所示fmcw激光雷达所采用扫描单元的光路结构示意图。
[0079]
如图7所示,所述扫描单元包括两个轴线垂直的扫描镜171和扫描镜172。所述扫描镜171和所述扫描镜172可以为一维振镜、摆镜、转镜等。所述扫描镜171和扫描镜172的运动的角速度不同(即如果所述扫描镜171和所述扫描镜172为振镜或摆镜,则所述扫描镜171和所述扫描镜172的偏转速度不等,如果所述扫描镜171和所述扫描镜172为转镜,则所述扫描镜171和所述扫描镜172的旋转速度不等)。
[0080]
当然本发明另一些实施例中,所述扫描单元也可以包括二维振镜进行扫描。
[0081]
需要说明的是,继续参考图4,采用一个包括m个收发模块的激光雷达进行运动速度测量的做法仅为一示例。本发明其他实施例,提供m个收发模块的步骤包括:提供多个激光雷达,所述多个激光雷达包括所述m个收发模块。而且m个收发模块可以均匀分布于所述多个激光雷达中,也可以非均匀分布于所述多个激光雷达中,本发明对此不做限定。
[0082]
而且,为了便于数据融合,提供多个激光雷达以提供m个收发模块的实施例中,所述多个激光雷达的帧频相同,从而使所述多个激光雷达能够尽可能实现同时探测。
[0083]
m个收发模块分别进行光信号收发,获得多组探测数据,分别为第(i,j)组探测数据,所述第(i,j)组探测数据包括:第(i,j)位置信息和第(i,j)径向速率vri,其中,1≦i≦m,1≦j≦ni。
[0084]
需要说明的是,本发明一些实施例中,如图所示,所述收发模块包括扫描单元。因此获得探测数据的步骤中,所述探测数据中的位置信息为所述扫描单元所处位置的信息。
[0085]
如图4和图5所示的方法实施例中,通过所述扫描单元a进行探测光束发射并接收回波光束所获得的探测数据中,位置信息是相对于所述扫描单元a的位置信息;通过所述扫描单元b进行探测光束发射并接收回波光束所获得的探测数据中,位置信息相对于所述扫描单元b的位置信息。
[0086]
继续参考图4,获得探测数据之后,执行步骤s500,至少根据第(a,aj)组探测数据和第(b,bj)组探测数据,并结合第a收发模块的位置信息和第b收发模块的位置信息,获得待测目标的运动速度,其中,1≦a≦m,1≦b≦m,1≦aj≦na,1≦bj≦nb,且a≠b,第a收发模块和第b收发模块之间具有预设距离。
[0087]
需要说明的是,本发明对激光雷达中收发模块的数量并不限定。本发明一些实施例中,所述激光模块仅包括2个收发模块,因此执行步骤s500时,第a收发模块和第b收发模
块即为所述激光雷达中的收发模块。本发明另一些实施例中,所述激光模块包括2个以上收发模块,因此执行步骤s500时,第a收发模块和第b收发模块为所述2个以上收发模块中任意两个满足条件的收发模块。
[0088]
本发明另一些实施例中,激光雷达包括3个或更多个收发模块,因此执行步骤s500时,除第(a,aj)组探测数据和第(b,bj)组探测数据,还可选取第(c,cj)组探测数据,其中,1≦c≦m,1≦cj≦nc,进而结合第a收发模块、第b收发模块和第c收发模块的位置信息,获得待测目标的运动速度。本发明对收发模块数量和选取的用于获得待测目标运动速度的探测数据所对应的收发模块数量均不作限定。
[0089]
结合参考图8,示出了图4所示激光雷达测量运动速度的方法实施例获得待测目标的运动速度的原理示意图。
[0090]
第a收发模块的扫描单元a和第b收发模块的扫描单元b的视场具有重叠区域。第a收发模块和第b收发模块分别进行一帧探测,可以获得同一待测目标的探测数据,即第a收发模块所获得的第(a,aj)组探测数据和第b收发模块所获得的第(b,bj)组探测数据与同一待测目标相对应。
[0091]
第a收发模块所获得的第(a,aj)组探测数据包括:第(a,aj)径向速率vr1;第b收发模块所获得的第(b,bj)组探测数据包括:第(b,bj)径向速率vr2。
[0092]
如图5和图8所示,第i收发模块所获得的径向速率,为待测目标的速度矢量在所述待测目标与收发模块的扫描单元的连线的方向上的投影,即第a收发模块所获得的第(a,aj)组探测数据中的第(a,aj)径向速率vr1为待测目标的速度矢量v在连线510a方向上的投影,第b收发模块所获得的第(b,bj)组探测数据中的第(b,bj)径向速率vr2为待测目标的速度矢量v在连线510b方向上的投影。
[0093]
由于第a收发模块和第b收发模块之间具有预设距离,即第a收发模块和第b收发模块的位置并不相同,因此第a收发模块的径向方向和第b收发模块的径向方向并不相同,待测目标的速度矢量v在不同径向方向上的投影也不相同,即第(a,aj)径向速率vr1和第(b,bj)径向速率vr2并不相同。具体的,所述预设距离大于等于1m,以保证精度。
[0094]
另一方面,第a收发模块所获得的第(a,aj)组探测数据还包括:第(a,aj)位置信息;第b收发模块所获得的第(b,bj)组探测数据还包括:第(b,bj)位置信息。
[0095]
根据第(a,aj)位置信息和第(b,bj)位置信息,结合预存的所述第a收发模块的位置信息(即所述第a收发模块中所述扫描单元a的位置信息)和所述第b收发模块的位置信息(即所述第b收发模块中所述扫描单元bj的位置信息),可以知道,待测目标相对于第a收发模块的径向方向,和待测目标相对于第b收发模块的径向方向。
[0096]
所述运动速度为矢量速度,即所述运动速度包括:运动速率v和运动方向角;所以获得待测目标的运动速度的步骤中,根据第(a,aj)径向速率vr1和第(b,bj)径向速率vr2,结合待测目标相对于第a收发模块的径向方向,和待测目标相对于第b收发模块的径向方向,获得待测目标的运动速度。
[0097]
如图8所示,基于第a收发模块获得的第(a,aj)组探测数据和第b收发模块获得的第(b,bj)组探测数据可以得到如下关系式:
[0098]vr1
=v cos(θ
1-α)
ꢀꢀ
(1
[0099]vr2
=v cos(θ
2-α)
ꢀꢀ
(2)
[0100]
其中,α表示待测目标的运动速度与横坐标正方向 x之间的夹角,即所述运动速度的运动方向角;v
r1
表示第a收发模块的径向方向所获得的径向速率,即第(a,aj)径向速率vr1;v
r2
表示第b收发模块的径向方向所获得的径向速率,即第(b,bj)径向速率vr2;θ1表示待测目标相对于第a收发模块的径向方向与横坐标x之间的夹角;θ2表示待测目标相对于第b收发模块的径向方向与横坐标x之间的夹角。
[0101]
而θ1和θ2可以分别根据待测目标相对于第a收发模块的径向方向和待测目标相对于第b收发模块的径向方向分别获得。由此可见,通过求解计算式(1)和(2)联立的二元一次方程,获得v和α,即可以获得待测目标的运动速度的运动速率v和运动方向角α。
[0102]
需要说明的是,本实施例中,以第a收发模块为原点,以第a收发模块指向第b收发模块的方向为x轴,垂直第a收发模块和第b收发模块连线且指向待测目标的方向为y轴建立坐标系进行计算。
[0103]
本发明另一些实施例中,还选取第(c,cj)组探测数据,其中,1≦c≦m,1≦cj≦nc,基于第(c,cj)组探测数据,可得到如下关系式:
[0104]vr3
=v cos(θ
3-α)
ꢀꢀ
(3)
[0105]
其中,v
r3
表示第c收发模块的径向方向所获得的径向速率,即第(c,cj)径向速率vr3,θ3表示待测目标相对于第c收发模块的径向方向与横坐标x之间的夹角。
[0106]
根据关系式(1)~(3),可求得v和α值,作为待测目标的运动速度的运动速率和运动方向角,可以减小计算误差和探测误差的影响。
[0107]
继续参考图4,本发明一些实施例中,获得所述待测目标的运动速度之前,所述方法还包括:执行步骤s400,判断所述第(a,aj)组探测数据和所述第(b,bj)组探测数据是否与同一待测目标相对应。
[0108]
由于第a收发模块和第b收发模块之间具有预设距离,即第a收发模块的扫描单元和第b收发模块的扫描单元之间具有预设距离(如图5中所示),可见,第a收发模块的扫描单元和第b收发模块的扫描单元之间的坐标系并统一,因此,判断所述第(a,aj)组探测数据和所述第(b,bj)组探测数据是否与同一待测目标相对应之前,需要进行坐标变换。
[0109]
所以结合参考图9,步骤s400,判断所述第(a,aj)组探测数据和所述第(b,bj)组探测数据是否与同一待测目标相对应的步骤包括:执行步骤s410,根据第a收发模块的位置信息和第b收发模块的位置信息,进行坐标转换,使所述第(a,aj)组探测数据中的第(a,aj)位置信息和所述第(b,bj)组探测数据中的第(b,bj)位置信息转换至同一坐标系下,获得第(a,aj)转换位置信息和第(b,bj)转换位置信息;之后执行步骤s420,比较所述第(a,aj)转换位置信息和所述第(b,bj)转换位置信息,在第(a,aj)转换位置信息和第(b,bj)转换位置信息的差值在预设范围内时,判断第(a,aj)组探测数据和第(b,bj)组探测数据与同一待测目标相对应。
[0110]
本发明一些实施例中,第(a,aj)转换位置信息和第(b,bj)转换位置信息均为世界坐标系下的位置信息,即进行坐标转换的步骤中,使所述第(a,aj)组探测数据中的第(a,aj)位置信息和所述第(b,bj)组探测数据中的第(b,bj)位置信息转换均至世界坐标系下。
[0111]
本发明另一些实施例中,第(a,aj)转换位置信息也可以是第b收发模块的坐标系下的位置信息,或者第(b,bj)转换位置信息也可以是第a收发模块的坐标系下的位置信息,即进行坐标转换的步骤中,使第(a,aj)位置信息和第(b,bj)位置信息转换至第a收发模块
和第b收发模块中一个收发模块的坐标系下。
[0112]
参考图10,示出了本发明激光雷达测量运动速度的方法另一实施例的流程示意图。
[0113]
与前述实施例不同之处在于,本发明一些实施例中,所述激光雷达测量运动速度的方法仅对待测目标在预设平面内的运动情况感兴趣。因此可以将三维空间的运动速度转化为预设平面内的运动速度,进而能够有效缩短处理时间,提高处理效率。
[0114]
本发明一些实施例中,所述激光雷达测量运动速度的方法应用于自动驾驶领域。由于自动驾驶技术主要关注于待测目标在水平面内的运动情况,所以所述预设平面为水平面,进一步为以雷达为参考的水平面,即雷达坐标系z=0的平面;或,所述预设平面为所述激光雷达的垂直视场角大小为0
°
的平面;或者,所述激光雷达具有旋转轴,所述预设平面为垂直所述旋转轴的平面。
[0115]
具体的,如图10所示,获得所述待测目标的运动速度的步骤包括:先执行步骤s510,根据第(i,j)组探测数据中的第(i,j)位置信息和所述第i收发模块的位置信息,获得第(i,j)径向方向角,其中第(i,j)径向方向角是指第i收发装置指向待测目标的方向;再执行步骤s520,至少根据第(a,aj)径向速率、第(a,aj)径向方向角、第(b,bj)径向速率和第(b,bj)径向方向角,获得所述运动速率和运动方向角。
[0116]
结合参考图11,通过第i收发模块发射第j探测光束的步骤包括:获得第(i,j)投影角γ,所述第(i,j)投影角γ为第i收发模块发射的第j探测光束与预设平面的夹角。所以,获得所述待测目标的运动速度的步骤中,结合所述第(i,j)投影角γ,获得预设平面内的运动速度vr//。
[0117]
需要说明的是,在获得第(i,j)投影角的步骤中,以通过第i收发模块所处位置为原点,以垂直预设平面的方向为z轴建立坐标系,因此所述预设平面为xoy平面。
[0118]
具体的,获得预设平面内的运动速度的步骤包括:根据所述第(i,j)径向速率v
ri
和所述第(i,j)投影角γ,获得第(i,j)投影径向速率v
ri//
,所述第(i,j)投影径向速率为所述待测目标在预设平面内的径向的运动速度;根据所述第(a,aj)位置信息、所述第(b,bj)位置信息、所述第(a,aj)投影径向速率和所述第(b,bj)投影径向速率,结合所述第a收发模块和所述第b收发模块的位置信息,获得所述待测目标在所述预设平面内的运动速度。
[0119]
也就是说,基于第a收发模块获得的第(a,aj)组探测数据和第b收发模块获得的第(b,bj)组探测数据可以得到如下关系式:
[0120]vr1//
=v
//
cos(θ
1-α)
ꢀꢀ
(4
[0121]vr2//
=v
//
cos(θ
2-α)
ꢀꢀ
(5)
[0122]
其中,α表示待测目标在预设平面内的运动速度与横坐标正方向 x之间的夹角;v
r1//
表示第a收发模块的径向方向所获得的径向速率在预设平面内的投影,即第(a,aj)投影径向速率;v
r2//
表示第b收发模块的径向方向所获得的径向速率在预设平面内的投影,即第(b,bj)投影径向速率;θ1表示预设平面内待测目标相对于第a收发模块的径向方向与横坐标x之间的夹角;θ2表示预设平面内待测目标相对于第b收发模块的径向方向与横坐标x之间的夹角。可见,所获得的v
//
也是待测目标运动速度在预设平面内的投影分量。
[0123]
本发明另一些实施例中,进一步基于第c收发模块的第(c,cj)组探测数据或更多收发模块的探测数据获得待测目标运动速度时,可求得v
//
作为待测目标运动速度在预设平
面内的投影分量,在此不再赘述。
[0124]
在本发明另一些实施例中,一个收发模块获得多组对应同一待测目标的探测数据,利用上述多组探测数据求得v和α。
[0125]
结合参考图12,示出了本发明激光雷达测量运动速度的方法再一实施例的流程示意图。
[0126]
本发明一些实施例中,通过第i收发模块发射第j探测光束的步骤包括:执行步骤s501,通过所述第i收发模块发射ni束探测光束进行一帧扫描,以获得所述第i收发模块的一帧扫描数据,所述第i收发模块的一帧扫描数据包括:ni组探测数据。其中,第(i,j)探测数据根据第i收发模块接收第j回波光束而获得,其中第j回波光束由第i收发模块发射的第j探测光束所形成,1≦j≦ni。
[0127]
可见,本发明技术方案可以通过一帧扫描数据,获得包括运动速率和运动方向角在内的所述待测目标的运动速度,从而能够有效提高待测目标运动状态判定的速度和准确性。
[0128]
本发明一些实施例中所述激光雷达测量运动速度的方法应用于自动驾驶领域,对某一待测目标,每个收发模块都可能在一帧内获得与该待测目标相对应的多组探测数据,利用上述多组探测数据计算待测目标的运动速度,可以有效减小测量误差造成的结果偏差。
[0129]
具体的,获得所述待测目标的运动速度的步骤还包括:执行步骤s521,根据多组探测数据,进行余弦曲线拟合,获得所述待测目标的运动速度。
[0130]
需要说明的是,为了提高计算精度、控制误差,用以进行余弦曲线拟合的所述多组探测数据必须与同一目标物相对应;而且所述多组探测数据的组数必须达到一定数量。
[0131]
如图12所示,执行步骤s501获得第i收发模块的一帧扫描数据之后,执行步骤s521进行余弦曲线拟合之前,获得所述待测目标的运动速度的步骤还包括:执行步骤s511,判断所述多组探测数据是否与同一待测目标相对应;在判断所述多组探测数据是与同一待测目标相对应时,根据所述多组探测数据进行余弦曲线拟合。
[0132]
具体的,通过第d收发模块发射nd束探测光束进行一帧扫描,以获得所述第d收发模块的一帧扫描数据,所述第d收发模块的一帧扫描数据包括:nd组探测数据,其中,n1组探测数据与一待测目标相对应;同样的,通过所述第e收发模块发射ne束探测光束进行一帧扫描,以获得所述第e收发模块的一帧扫描数据,所述第e收发模块的一帧扫描数据包括:ne组探测数据,其中,n2组探测数据与所述待测目标相对应。
[0133]
需要说明的是,本发明一些实施例中,第i收发模块进行一帧扫描、获得一帧扫描数据之后,判断一帧扫描数据中的ni组探测数据是否与同一待测目标相对应,从而获得与一待测目标相对应的ni组探测数据;其中,可以根据ni组探测数据的位置信息的差值在预设范围内,判断探测数据与同一待测目标相对应。
[0134]
本发明一些实施例中,对所述nd组探测数据和所述ne组探测数据进行坐标变换,根据nd组探测数据和ne组探测数据转换后的位置信息差值在预设范围内,确定所述nd组探测数据和ne组探测数据对应同一待测目标。进一步,对所述nd组探测数据采用聚类算法进一步判断是否与同一待测目标相对应,获得与同一待测目标相对应的n1组探测数据;对所述ne组探测数据采用聚类算法进一步判断是否与同一待测目标相对应,获得与同一待测目标相
对应的n2组探测数据。从而获得多个收发模块的探测数据中与同一待测目标相对应的多组探测数据。
[0135]
前述计算式(4)和(5)可以看作由幅值v
//
和相位α确定的余弦曲线,而与同一待测目标相对应的n1组探测数据和n2组探测数据均分布于幅值相等、相位相同的余弦曲线上。可见,基于n1组探测数据和n2组探测数据进行余弦曲线拟合,可以确定幅值|v
//
|和相位α。
[0136]
具体的,本发明一些实施例中,进行余弦曲线拟合的步骤包括:采用最小二乘法进行余弦曲线拟合。
[0137]
相应的,本发明还提供一种激光雷达测量速度的装置。
[0138]
参考图13,示出了本发明激光雷达测量运动速度的装置一实施例的功能框图。
[0139]
所述激光雷达测量运动速度的装置包括:m个收发模块310,其中,m≧2;第i收发模块310发射第j探测光束并接收第j回波光束,所述第j探测光束被反射后形成所述第j回波光束,其中,1≦i≦m,1≦j≦ni。
[0140]
需要说明的是,其中ni是指第i收发模块进行一帧扫描所发射探测光束的数量,即所述第i收发模块发射ni束探测光束进行一帧扫描,以获得所述第i收发模块的一帧扫描数据,所述第i收发模块的一帧扫描数据包括:ni组探测数据。
[0141]
所述装置为激光雷达测量运动速度的装置,因此本发明一些实施例中,所述装置包括:一个激光雷达,所述激光雷达包括所述m个收发模块310。
[0142]
结合参考图5,示出了图13所示激光雷达测量运动速度的装置实施例中所述激光雷达的结构示意图。
[0143]
本发明一些实施例中,所述激光雷达测量运动速度的装置仅包括1个具有m个收发模块310的激光雷达,即所述装置中的激光雷达仅包括1个光源。
[0144]
需要说明的是,图5所示的激光雷达中,所述收发模块包括扫描单元。图5示出了所述激光雷达内m个收发模块中的2个扫描单元,即扫描单元a和扫描单元b。
[0145]
还需要说明的是,所述激光雷达中收发模块的数量可以为2个或2个以上的数量。本发明对所述激光雷达中收发模块的数量并不限定。
[0146]
本发明一些实施例中,所述激光雷达为fmcw激光雷达,即所述激光雷达为调频连续波(frequency modulated continuous wave,fmcw)激光雷达。fmcw激光雷达能够通过获得待测目标的径向速率和位置信息。
[0147]
需要说明的是,所述激光雷达的具体技术方案参考前述方法实施例中的记载,本发明在此不再赘述。
[0148]
还需要说明的是,所述装置包括:1个激光雷达的做法仅为一示例。本发明其他实施例,所述装置也可以包括:多个激光雷达,所述多个激光雷达包括所述m个收发模块。而且m个收发模块可以均匀分布于所述多个激光雷达中,也可以非均匀分布于所述多个激光雷达中,本发明对此不做限定。
[0149]
而且,为了便于数据融合,所述装置包括多个激光雷达的实施例中,所述多个激光雷达的帧频相同,从而使所述多个激光雷达能够尽可能实习同时探测。
[0150]
m个收发模块310分别进行光信号收发,获得多组探测数据,分别为第(i,j)组探测数据,所述第(i,j)组探测数据包括:第(i,j)位置信息和第(i,j)径向速率vri,其中,1≦i≦m,1≦j≦ni。
[0151]
需要说明的是,本发明一些实施例中,如图所示,收发模块包括扫描单元。因此所述探测数据中的位置信息为所述扫描单元所处位置的信息。
[0152]
如图4和图5所示的方法实施例中,所述扫描单元a进行探测光束发射并接收回波光束所获得的探测数据中,位置信息是相对于所述扫描单元a的位置信息;通过所述扫描单元b进行探测光束发射并接收回波光束所获得的探测数据中,位置信息相对于所述扫描单元b的位置信息。
[0153]
继续参考图13,所述装置还包括:数据模块320,所述数据模块320适宜于根据所述第j回波光束,获得第(i,j)组探测数据,所述第(i,j)组探测数据包括:第(i,j)位置信息和第(i,j)径向速率;速度模块330,所述速度模块340适宜于至少根据第(a,aj)组探测数据和第(b,bj)组探测数据,并结合第a收发模块的位置信息和第b收发模块的位置信息,获得待测目标的运动速度,其中,1≦a≦m,1≦b≦m,1≦aj≦na,1≦bj≦nb,且a≠b,第a收发模块和第b收发模块之间具有预设距离。
[0154]
需要说明的是,本发明对激光雷达中收发模块的数量并不限定。本发明一些实施例中,所述激光模块仅包括2个收发模块,即为第a收发模块和第b收发模块。本发明另一些实施例中,所述激光模块包括2个以上收发模块,第a收发模块和第b收发模块为所述2个以上收发模块中任意两个满足条件的收发模块。
[0155]
本发明另一些实施例中,激光雷达包括3个或更多个收发模块,即所述激光雷达还包括:第c收发模块;因此除第(a,aj)组探测数据和第(b,bj)组探测数据,所述速度模块330还可选取第(c,cj)组探测数据,其中,1≦c≦m,1≦cj≦nc,进而结合第a收发模块、第b收发模块和第c收发模块的位置信息,获得待测目标的运动速度。本发明对收发模块数量和选取的用于获得待测目标运动速度的探测数据所对应的收发模块数量均不作限定。
[0156]
结合参考图8,示出了图13所示激光雷达测量运动速度的装置实施例获得待测目标的运动速度的原理示意图。
[0157]
第a收发模块的扫描单元a和第b收发模块的扫描单元b的视场具有重叠区域。第a收发模块和第b收发模块分别进行一帧探测,所述数据模块320可以获得同一待测目标的探测数据,即第a收发模块所获得的第(a,aj)组探测数据和第b收发模块所获得的第(b,bj)组探测数据与同一待测目标相对应。
[0158]
所述数据模块320通过所述第a收发模块所获得的第(a,aj)组探测数据包括:第(a,aj)径向速率vr1;所述数据模块320通过所述第b收发模块所获得的第(b,bj)组探测数据包括:第(b,bj)径向速率vr2。
[0159]
结合参考图5和图8,第i收发模块所获得的径向速率,为待测目标的速度矢量在所述待测目标与收发模块的扫描单元的连线的方向上的投影,即第a收发模块所获得的第(a,aj)组探测数据中的第(a,aj)径向速率vr1为待测目标的速度矢量v在连线510a方向上的投影,第b收发模块所获得的第(b,bj)组探测数据中的第(b,bj)径向速率vr2为待测目标的速度矢量v在连线510b方向上的投影。
[0160]
由于第a收发模块和第b收发模块之间具有预设距离,即第a收发模块和第b收发模块的位置并不相同,因此第a收发模块的径向方向和第b收发模块的径向方向并不相同,待测目标的速度矢量v在不同径向方向上的投影也不相同,即第(a,aj)径向速率vr1和第(b,bj)径向速率vr2并不相同。具体的,所述预设距离大于等于1m,以保证精度。
[0161]
另一方面,所述数据模块320通过第a收发模块所获得的第(a,aj)组探测数据还包括:第(a,aj)位置信息;所述数据模块320通过第b收发模块所获得的第(b,bj)组探测数据还包括:第(b,bj)位置信息。
[0162]
根据第(a,aj)位置信息和第(b,bj)位置信息,结合预存的所述第a收发模块的位置信息(即所述第a收发模块中所述扫描单元a的位置信息)和所述第b收发模块的位置信息(即所述第b收发模块中所述扫描单元bj的位置信息),所述速度模块340可以获得所述待测目标相对于第a收发模块的径向方向,和待测目标相对于第b收发模块的径向方向。
[0163]
所述运动速度为矢量速度,即所述运动速度包括:运动速率v和运动方向角;所以所述速度模块340根据第(a,aj)径向速率vr1和第(b,bj)径向速率vr2,结合待测目标相对于第a收发模块的径向方向,和待测目标相对于第b收发模块的径向方向,获得待测目标的运动速度。
[0164]
结合参考图8,基于第a收发模块获得的第(a,aj)组探测数据和第b收发模块获得的第(b,bj)组探测数据可以得到如下关系式:
[0165]vrl
=v cos(θ
1-α)
ꢀꢀ
(1
[0166]vr2
=v cos(θ
2-α)
ꢀꢀ
(2)
[0167]
其中,α表示待测目标的运动速度与横坐标正方向 x之间的夹角,即所述运动速度的运动方向角;v
r1
表示第a收发模块的径向方向所获得的径向速率,即第(a,aj)径向速率vr1;v
r2
表示第b收发模块的径向方向所获得的径向速率,即第(b,bj)径向速率vr2;θ1表示待测目标相对于第a收发模块的径向方向与横坐标x之间的夹角;θ2表示待测目标相对于第b收发模块的径向方向与横坐标x之间的夹角。
[0168]
而θ1和θ2可以分别根据待测目标相对于第a收发模块的径向方向和待测目标相对于第b收发模块的径向方向分别获得。由此可见,所述速度模块340通过求解计算式(1)和(2)联立的二元一次方程,获得v和α,即可以获得待测目标的运动速度的运动速率v和运动方向角α。
[0169]
需要说明的是,本实施例中,通过求解计算式的过程中,所述速度模块340基于以第a收发模块为原点,以第a收发模块指向第b收发模块的方向为x轴,垂直第a收发模块和第b收发模块连线且指向待测目标的方向为y轴建立坐标系进行计算。
[0170]
本发明另一些实施例中,还选取第(c,cj)组探测数据,其中,1≦c≦m,1≦cj≦nc,基于第(c,cj)组探测数据,可得到如下关系式:
[0171]vr3
=v cos(θ
3-α)
ꢀꢀ
(3)
[0172]
其中,v
r3
表示第c收发模块的径向方向所获得的径向速率,即第(c,cj)径向速率vr3,θ3表示待测目标相对于第c收发模块的径向方向与横坐标x之间的夹角。
[0173]
在探测完全精准的情况下,根据关系式(1)~(3)求得的v和α应为相等的,但激光雷达的探测存在一定的偏差或误差,则根据关系式(1)~(3),可两两结合求得一组v和α值,将多组|v|和α值求其平均值,作为待测目标的运动速度的运动速率v和运动方向角α,可以减小探测误差的影响。
[0174]
继续参考图13,本发明一些实施例中,所述装置还包括:甄别模块330,所述甄别模块330适宜于判断所述第(a,aj)组探测数据和所述第(b,bj)组探测数据是否与同一待测目标相对应。
[0175]
由于第a收发模块和第b收发模块之间具有预设距离,即第a收发模块的扫描单元和第b收发模块的扫描单元之间具有预设距离(如图5中所示),可见,第a收发模块的扫描单元和第b收发模块的扫描单元之间的坐标系并统一,因此,除了判断所述第(a,aj)组探测数据和所述第(b,bj)组探测数据是否与同一待测目标相对应,所述甄别模块330在还需要进行坐标变换。
[0176]
如图4所示,所述甄别模块330包括:转换单元331,所述转换单元331适宜于根据第a收发模块的位置信息和第b收发模块的位置信息,进行坐标转换,使所述第(a,aj)组探测数据中的第(a,aj)位置信息和所述第(b,bj)组探测数据中的第(b,bj)位置信息转换至同一坐标系下,获得第(a,aj)转换位置信息和第(b,bj)转换位置信息;比较单元332,所述比较单元332适宜于比较所述第(a,aj)转换位置信息和所述第(b,bj)转换位置信息,在第(a,aj)转换位置信息和第(b,bj)转换位置信息的差值在预设范围内时,判断第(a,aj)组探测数据和第(b,bj)组探测数据与同一待测目标相对应。
[0177]
本发明一些实施例中,第(a,aj)转换位置信息和第(b,bj)转换位置信息均为世界坐标系下的位置信息,即所述转换单元331使所述第(a,aj)组探测数据中的第(a,aj)位置信息和所述第(b,bj)组探测数据中的第(b,bj)位置信息转换均至世界坐标系下。
[0178]
本发明另一些实施例中,第(a,aj)转换位置信息也可以是第b收发模块的坐标系下的位置信息,或者第(b,bj)转换位置信息也可以是第a收发模块的坐标系下的位置信息,即所述转换单元使第(a,aj)位置信息和第(b,bj)位置信息转换至第a收发模块和第b收发模块中一个收发模块的坐标系下。
[0179]
参考图14,示出了本发明激光雷达测量运动速度的装置另一实施例的功能框图。
[0180]
与前述实施例不同之处在于,本发明一些实施例中,所述激光雷达测量运动速度的方法仅对待测目标在预设平面内的运动情况感兴趣。因此可以将三维空间的运动速度转化为预设平面内的运动速度,进而能够有效缩短处理时间,提高处理效率。
[0181]
本发明一些实施例中,所述激光雷达测量运动速度的方法应用于自动驾驶领域。由于自动驾驶技术主要关注于待测目标在水平面内的运动情况,所以所述预设平面为水平面;或,所述预设平面为所述激光雷达的垂直视场角大小为0
°
的平面;或者,所述激光雷达具有旋转轴,所述预设平面为垂直所述旋转轴的平面。
[0182]
具体的,如图14所示,所述速度模块340包括:方向角单元341,所述方向角单元341适宜于根据第(i,j)组探测数据中的第(i,j)位置信息和所述第i收发模块的位置信息,获得第(i,j)径向方向角,其中第(i,j)径向方向角是指第i收发装置指向待测目标的方向;计算单元343,所述计算单元343适宜于至少根据第(a,aj)径向速率、第(a,aj)径向方向角、第(b,bj)径向速率和第(b,bj)径向方向角,获得所述运动速率和运动方向角。
[0183]
结合参考图11,所述速度模块340还适宜于从第i收发模块310获得第(i,j)投影角γ,所述第(i,j)投影角γ为第i收发模块310发射的第j探测光束与预设平面的夹角;结合所述第(i,j)投影角γ,获得预设平面内的运动速度。所以,所述速度模块340适宜结合所述第(i,j)投影角γ,获得预设平面内的运动速度vr//。
[0184]
需要说明的是,所述速度模块340获得第(i,j)投影角γ的过程中,以通过第i收发模块所处位置为原点,以垂直预设平面的方向为z轴建立坐标系,因此所述预设平面为xoy平面。
[0185]
具体的,如图14所示,所述速度模块340还包括:投影单元342,所述投影单元342适宜于根据所述第(i,j)径向速率v
ri
和所述第(i,j)投影角γ,获得第(i,j)投影径向速率v
ri//
,所述第(i,j)投影径向速率为所述待测目标在预设平面内的径向的运动速度;所述计算单元343适宜于根据所述第(a,aj)位置信息、所述第(b,bj)位置信息、所述第(a,aj)投影径向速率和所述第(b,bj)投影径向速率,结合所述第a收发模块和所述第b收发模块的位置信息,获得所述待测目标在所述预设平面内的运动速度。
[0186]
也就是说,基于第a收发模块获得的第(a,aj)组探测数据和第b收发模块获得的第(b,bj)组探测数据,所述计算单元343可以得到如下关系式:
[0187]vr1//
=v
//
cos(θ
1-α)
ꢀꢀ
(4
[0188]vr2//
=v
//
cos(θ
2-α)
ꢀꢀ
(5)
[0189]
其中,α表示待测目标在预设平面内的运动速度与横坐标正方向 x之间的夹角;v
r1//
表示第a收发模块的径向方向所获得的径向速率在预设平面内的投影,即第(a,aj)投影径向速率;v
r2//
表示第b收发模块的径向方向所获得的径向速率在预设平面内的投影,即第(b,bj)投影径向速率;θ1表示预设平面内待测目标相对于第a收发模块的径向方向与横坐标x之间的夹角;θ2表示预设平面内待测目标相对于第b收发模块的径向方向与横坐标x之间的夹角。所述速度模块340通过求解计算式(4)和(5)联立的二元一次方程,所获得的v
//
也是待测目标运动速度在预设平面内的投影分量。
[0190]
本发明另一些实施例中,进一步基于第c收发模块的第(c,cj)组探测数据或更多收发模块的探测数据获得待测目标运动速度时,可求得多个v
//
并求其平均值,作为待测目标运动速度在预设平面内的投影分量,在此不再赘述。
[0191]
结合参考图15,示出了本发明激光雷达测量运动速度的装置再一实施例的功能框图。
[0192]
本发明一些实施例中,所述第i收发模块(图中未示出)发射ni束探测光束进行一帧扫描;所述数据模块(图中未示出)适宜于获得所述第i收发模块的一帧扫描数据,所述第i收发模块的一帧扫描数据包括:ni组探测数据。其中,第(i,j)探测数据根据第i收发模块接收第j回波光束而获得,其中第j回波光束由第i收发模块发射的第j探测光束所形成,1≦j≦ni。
[0193]
可见,本发明技术方案可以通过一帧扫描数据,获得包括运动速率和运动方向角在内的所述待测目标的运动速度,从而能够有效提高待测目标运动状态判定的速度和准确性。
[0194]
本发明一些实施例中,所述激光雷达测量运动速度的装置应用于自动驾驶领域。特别是针对近距离、大体积的待测目标(例如近距离的公交车等),相对于所述激光雷达而言,其垂直方向俯仰角较大,即在垂直视场范围内,所述的待测目标所覆盖的范围相对较大,利用不同垂直角度的数据,可以有效减小测量误差造成的结果偏差。
[0195]
基于同样的分辨率,对于近距离待测目标(例如相距50m以内或者相距20m以内)而言,所述数据模块能够获得同一待测目标的探测数据组数较多,例如一辆车可以探测到几百组探测数据,即这几百组探测数据均与同一待测目标相对应。可见,所述速度模块340可以通过与同一待测目标相对应的多组探测数据的综合处理,以有效减小测量误差、提高计算精度。而且通过多组探测数据的综合处理以减小测量误差的做法,判断精度高,更适合于
城市道路的使用场景。
[0196]
具体的,如图15所示,所述速度模块340还包括:拟合单元344,所述拟合单元344适宜于根据所述多组探测数据,进行余弦曲线拟合,获得所述待测目标的运动速度。
[0197]
为了提高计算精度、控制误差,用以进行余弦曲线拟合的所述多组探测数据必须与同一目标物相对应;而且所述多组探测数据的组数必须达到一定数量。
[0198]
所以如图12所示,在甄别模块330判断所述多组探测数据是与同一待测目标相对应时,所述拟合单元344根据所述多组探测数据进行余弦曲线拟合。
[0199]
具体的,通过第d1收发模块发射n
d1
束探测光束进行一帧扫描,所述数据模块获得所述第d1收发模块的一帧扫描数据,所述第d1收发模块的一帧扫描数据包括:n
d1
组探测数据,其中,n1组探测数据与一待测目标相对应;同样的,通过第e1收发模块发射n
e1
束探测光束进行一帧扫描,所述数据模块获得所述第e1收发模块的一帧扫描数据,所述第d1收发模块的一帧扫描数据包括:n
e1
组探测数据,其中,n2组探测数据与所述待测目标相对应。
[0200]
需要说明的是,本发明一些实施例中,所述装置还包括:甄别模块330,第i收发模块进行一帧扫描、获得一帧扫描数据之后,所述甄别模块330适宜于判断一帧扫描数据中的ni组探测数据是否与同一待测目标相对应,从而获得与一待测目标相对应的ni组探测数据。具体的,所述甄别模块330可以根据ni组探测数据的位置信息的差值在预设范围内,判断探测数据与同一待测目标相对应。
[0201]
本发明一些实施例中,所述甄别模块330对所述nd组探测数据和所述ne组探测数据进行坐标变换,根据nd组探测数据和ne组探测数据转换后的位置信息差值在预设范围内,确定所述nd组探测数据和ne组探测数据对应同一待测目标。进一步,所述甄别模块330对所述nd组探测数据采用聚类算法进一步判断是否与同一待测目标相对应,获得与同一待测目标相对应的n1组探测数据;所述甄别模块330对所述ne组探测数据采用聚类算法进一步判断是否与同一待测目标相对应,获得与同一待测目标相对应的n2组探测数据。从而获得多个收发模块的探测数据中与同一待测目标相对应的多组探测数据。
[0202]
前述计算式(4)和(5)可以看作由幅值v
//
和相位α确定的余弦曲线,而与同一待测目标相对应的n1组探测数据和n2组探测数据均分布于幅值相等、相位相同的余弦曲线上。所以,所述拟合单元344基于n1组探测数据和n2组探测数据分别进行余弦曲线拟合,可以分别获得相应的计算式(4)和(5);所述速度模块340根据拟合所获得的计算式(4)和(5),进而可以确定幅值v
//
和相位α。具体的,本发明一些实施例中,所述拟合单元344采用最小二乘法进行余弦曲线拟合。
[0203]
另外,本发明还提供一种控制系统,所述控制系统为自动驾驶系统。
[0204]
具体的,所述控制系统包括:测量装置和控制装置;其中所述测量装置为本发明的激光雷达测量运动速度的装置;所述控制装置适宜于结合所述测量装置获得的运动速度控制车辆。
[0205]
所述测量装置为本发明的激光雷达测量运动速度的装置,因此所述测量装置的具体技术方案参考前述激光雷达测量运动速度的装置的实施例的记载,本发明在此不再赘述。
[0206]
由于所述测量装置通过间隔预设距离的2个以上的收发模块对待测目标进行探测,通过运动速度与探测数据之间的函数关系,可以在一帧数据的基础上,获得待测目标的
运动速度,能够避免多帧数据处理所造成的决策延迟问题,能够有效提高探测和计算速度。
[0207]
而且在一些实施例中,所述测量装置可以通过一帧扫描数据中多组探测数据的拟合曲线,获得所述待测目标的运动速度。利用与同一探测目标相对应的多组探测数据的综合处理,能够有效减小测量误差、提高计算精度;所述测量装置误差的减小,能够有效的提高所述控制系统的判断精度,使所述控制系统更适合于城市道路的使用场景。
[0208]
综上,本发明技术方案通过多个收发模块分别获得探测数据,在探测数据的基础上,结合收发模块的位置信息,获得待测目标的运动速度。由于所述多个收发模块之间具有预设距离,因此所获得的运动速度为矢量速度,即所述运动速度包括运动速率和运动方向角。矢量速度的获得能够更准确的反应待测目标的实际运动情况,能够有效提高车辆控制的准确性和精度。本发明可选方案中,特别是针对近距离目标物,通过一帧扫描数据的获得以获得探测数据,所获得的一帧扫描数据包括一个或多个第i组探测数据,可以根据多个第i组探测数据,进行余弦曲线拟合以获得第i拟合曲线;所述运动速度可以根据多个拟合曲线获得,以提高测量精度,降低测量误差。本发明可选方案中,从所述收发模块可以获得相对应的探测光束的出射角度作为投影角;结合所述投影角能够获得预设平面内的运动速度,从而将三维空间的运动速度转化为预设平面内的运动速度,进而能够有效缩短处理时间,提高处理效率。特别是针对自动驾驶领域,预设平面可以是自动驾驶更感兴趣的水平面,以同时保证测量精度和测量速度。
[0209]
虽然本发明披露如上,但本发明并非限定于此。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各种更动与修改,因此本发明的保护范围应当以权利要求所限定的范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。