1.本发明涉及具有权利要求1或10的前序部分的特征的用于容器的侧壁检查的透射光检查设备和透射光检查方法。
背景技术:
2.通常情况下,这种透射光检查设备和方法在饮料加工设施中被用于,识别容器中的透明异物,如薄膜残留物。容器例如可以是在经透射光检查后将饮料灌装到其中的瓶子。
3.透射光检查设备通常包括用于运输容器的运输机和附属于运输机的至少一个检查站,以便以偏振光对容器进行透视。在检查时,容器被引导到下游具有偏振器的照射装置与上游具有分析器的摄像机系统之间,并因此被偏振光透视并被摄像机系统检测。
4.由于透明异物往往具有应力双折射和/或分子致双折射,当用偏振光透视时,它们可以被更好地被识别,并在摄像机图像中成像为较暗的区域。然后可以用本身已公知的图像处理算法在摄像机图像中鉴别出它们。
5.在实践中避免了对线性偏振滤光器的最接近的使用,这是因为所有应力光学主轴与线性偏振滤光器的偏振方向平行或垂直的透明异物都不会变暗,因此无法被识别。因此,为了无论透明异物的定向如何都尽量保持识别,通常使用圆形的偏振滤光器。
6.然而已发现的是,一些异物只起微弱的偏振作用和/或只在光谱的一部分中起偏振作用。因此,用唯一的圆形分析器识别它们是特别困难的。
7.例如,在de 20 2013 100 834 ul中已知有一种用于识别容器上污物的设备,其中,偏振器被构造成用于对照射装置发射的光进行圆偏振或椭圆偏振,并且用两个摄像机检测容器,在摄像机上游连接具有不同偏振转动方向的分析器,以便特别良好地识别标签后面的污物。然而,这种构造是复杂和昂贵的。
技术实现要素:
8.因此,本发明的所提出任务是,提供一种透射光检查设备和透射光检查方法,以其在容器处理设施中仍能更可靠地识别到容器中的透明异物。
9.为了解决该提出任务,本发明提供了一种具有权利要求1的特征的透射光检查设备。在从属权利要求中列出了有利的实施方式。
10.申请人的广泛研究发现,当利用至少一个分析器检测至少四个不同的线性偏振方向,例如0
°
、45
°
、90
°
和135
°
时,就能最好地识别出透明异物。由于摄像机系统和至少一个分析器被构造成用于同时识别四个不同的线性偏振方向,使得即使在高通过量的容器处理设施情况下,也能以很小的耗费执行透射光检查。此外,可以被特别可靠地识别出弱偏振的异物。
11.透射光检查设备可以布置在容器处理设施中。同样,透射光检查设备也可以布置在用于制造容器的设施中。透射光检查设备可以布置在岔路器后面,以便分拣出被至少一个检查站在其中识别到一个或多个透明异物的容器。被分拣出的容器可以被清洁或回收。
此外,岔路器可以被构造成用于将没有透明异物的容器输送到容器处理机,例如灌装机。
12.容器尤其可以是玻璃瓶,但塑料瓶也是能想到的。优选地,容器可以被设置成用来容纳饮料、卫生物品、糊状物、化学产品、生物产品和/或医药产品。一般来说,容器可以被设置成用于任何能流动或能灌装的介质。容器可以是空容器或填充有产品的容器。
13.透明异物可以包括例如薄膜残留物、塑料部分和类似物。
14.运输机优选可以构造成线性运输机,其中,具有偏振器的照射装置被布置在一侧处,而具有至少一个分析器的摄像机系统被布置在对置的一侧处。也能想到的是,运输机被构造成转塔,利用其使容器在具有偏振器的照射装置与具有至少一个分析器的摄像机系统之间被运输。
15.照射装置可以包括光源、透镜、漫射体和/或遮板。光源可以包括白炽灯、气体放电灯、荧光灯管和/或led作为发光器件。优选地,光源由至少一块具有由led构成的矩阵布置结构的电路板形成。
16.光源可以发射可见的光谱和/或红外的光谱。可见的光谱的波长范围可以处在380nm到780nm,优选440nm到650nm,并且/或者红外的光谱的波长范围可以处在780nm到3μm,优选是800nm
‑
1μm。同样能想到的是,可见的光谱和/或红外的光谱分别只是单色的光谱。
17.偏振器可以布置在照射装置内部或布置在照射装置的出光口的区域中。偏振器和/或分析器可以至少区段式地呈盘状或薄膜状地构造。例如,偏振器和/或分析器可以是偏振薄膜。
18.偏振器和/或分析器可以彼此无关地包括圆形的偏振滤光器。由此可以识别到处于所有转动位置中的薄膜。出于实践原因,由此可以避免使用4个具有不同取向的线性偏振滤光器的照射装置。因此,优选地,照射装置配备了圆形的偏振滤光器作为偏振器,从而向容器和摄像机的方向射出圆形光。
19.摄像机系统可以包括摄像机和物镜。摄像机可以包括行传感器或矩阵传感器,例如ccd传感器或cmos传感器。摄像机系统可以经由数据线路与图像处理单元相连接,以便在透明异物方面评估被透视的容器的摄像机图像。然而,也能想到的是,图像处理单元被集成到摄像机系统中。
20.利用至少一个分析器和摄像机系统检测到的线性偏振方向可以包括0
°
、45
°
、90
°
和135
°
。换句话说,四个不同的线性偏振方向可以相对彼此扭转45
°
。至少一个分析器可以是至少一个线性偏振滤光器。换句话说,至少一个分析器可以被构造为至少一个线性偏振器。
21.能想到的是,在摄像机系统的上游连接镜柜,以便使容器的多个容器侧面并排地作为摄像机图像的图像扇区被检测到。
22.透射光检查设备可以包括控制装置,以便控制照射装置和/或摄像机系统。此外,控制装置可以包括图像处理单元,以便接收摄像机系统的摄像机图像,并针对透明异物进行评估。此外,控制装置可以被构造成用于控制输送机和/或检测容器的运输定位。能想到的是,控制装置包括数字处理器(cpu)、存储器单元、接口单元、输入单元和/或输出单元。
23.摄像机系统可以包括物镜和矩阵传感器,其中,至少一个分析器被构造成分析器矩阵,它布置在物镜与矩阵传感器的光敏传感器元件之间,以便用矩阵传感器同时检测至少四个不同的线性偏振方向。由此可以以特别简单的方式构建摄像机系统,这是因为四个
不同的线性偏振方向用正好一个矩阵传感器来检测,而不是用多个矩阵传感器来检测。“其中,至少一个分析器被构造成分析器矩阵,它布置在物镜与矩阵传感器的光敏传感器元件之间”在这里可以意味着,分析器矩阵直接布置在拜尔滤光器和/或矩阵传感器的光敏传感器元件前面。矩阵传感器可以包括被构造成分析器矩阵的分析器,其作为集成在光敏传感器元件前面的元件。由此使得摄像机系统的结构更加紧凑且更简单。能想到的是,构造为分析器矩阵的分析器布置在微透镜阵列与矩阵传感器的光敏传感器元件之间。由此能使用特别多的物镜类型,而不损害成像质量。然而,也能想到的是,构造为分析器矩阵的分析器直接布置在矩阵传感器的微透镜阵列前面。
24.构造为分析器矩阵的分析器可以包括多个布置成矩阵的偏振器元件,它们分别与光敏传感器元件中的一个相配属,并且优选沿至少四个不同的线性偏振方向交替取向。由此,给矩阵传感器的每个光敏传感器元件都配属有分析器的不同偏振器元件,从而由此在考虑到每个像素的偏振情况下,能获得容器的特别高分辨率的成像。每个光敏传感器元件可以相当于从矩阵传感器输出的摄像机图像的一个像素,尤其是其中,给每个光敏传感器元件都配属有分析器的偏振器元件。布置成矩阵的偏振器元件可以分别构造成偏振滤光器,其中,偏振滤光器以如下方式相互扭转地呈矩阵布置,即,使得用它们检测四个不同的线性偏振方向。例如,线性偏振方向为0
°
、45
°
、90
°
和135
°
。
25.布置成矩阵的偏振器元件可以以如下方式分组,即,使得四个相邻布置的偏振器元件沿至少四个不同的线性偏振方向取向并形成一个组。由此,使得不同的线性偏振方向被矩阵传感器的光敏传感器元件交替检测,由此在考虑到偏振的情况下在摄像机图像中得到较高的空间分辨率。能想到的是,这些组本身在矩阵传感器上呈矩阵状地布置。由此,使得不同的线性偏振方向沿着矩阵传感器的两个轴线被交替检测。
26.例如,矩阵传感器可以是索尼imx250mzr或imx250myr型的图像传感器,尤其是其中,被构造为分析器矩阵的分析器布置在矩阵传感器的微透镜阵列与像素阵列之间。然而,也能想到的是,被构造为分析器矩阵的分析器在摄像机系统的光路中直接布置在矩阵传感器的微透镜阵列前面。
27.替选地,还能想到的是,摄像机系统包括至少四个具有各一个分析器、物镜和矩阵传感器的摄像机,其中,至少四个摄像机的分析器沿至少四个不同的线性偏振方向取向,以便在多个摄像机图像中检测到它们。由此虽然需要多个摄像机,但对容器的检测是空间分辨率更高的。能想到的是,分析器分别包括线性偏振滤光器。线性偏振滤光器可以以如下方式彼此扭转,即,使得能检测到线性偏振方向0
°
、45
°
、90
°
和135
°
。
28.在另外的替选方案中,还能想到的是,摄像机系统包括具有物镜且具有矩阵传感器的至少四个摄像机,其中,至少一个分析器包括两个偏振分光器,以便将至少四个不同的线性偏振方向中的两个分别划分给至少四个摄像机中的两个。由此使得图像场可以分别由两个摄像机叠加而成,从而使相应的摄像机图像中的图像视角相似,甚至完全相同。由此可以支持在评估时对摄像机图像中的容器上的图像区域的分配。偏振分光器可以是光学元件,其使第一线性偏振方向透过,却反射相对第一线性偏振方向转动90
°
的第二线性偏振方向。
29.优选地,照射装置的偏振器可以包括圆形或椭圆形的偏振滤光器。申请人的广泛研究发现,这与四个不同的线性偏振方向的措施相结合,导致了对透明异物的特别可靠的
检测。然而,原则上也能想到使用线性偏振滤光器作为照射装置的偏振器。
30.还能想到的是,摄像机系统构造有用于分开检测不同光波长的滤光器,尤其是至少一个拜尔滤光器或至少一个像素式彩色滤光器,以便除了检测不同的线性偏振方向,还检测偏振光的不同的光波长。由此使识别特别可靠,这是因为透明异物的偏振效应也会取决于光波长。由此可以改善对无色容器的识别。这例如可以涉及索尼imx250myr类型的矩阵传感器,其除了能够进行偏振外还能进行色彩检测。
31.此外,本发明还提供了一种具有权利要求10的特征的用于容器的侧壁检查的透射光检查方法。在从属权利要求中列出了本发明的有利实施方式。
32.申请人的广泛研究发现,当用至少一个分析器检测至少四个不同的线性偏振方向时,能够最优地识别到透明异物。由于具有至少一个分析器的摄像机系统同时检测四个不同的线性偏振方向,使得即使在高通量的容器处理设施情况下,也能以很小的耗费可靠地执行透射光检查。此外,弱偏振的异物可以被特别可靠地识别出来。
33.该透射光检查方法可以合理地单独或以任意组合方式包括上述关于透射光检查设备的特征,尤其是根据权利要求1
‑
9中任一项的特征。能想到的是,该透射光检查方法是用上述透射光检查设备、尤其是根据权利要求1
‑
9中任一项的透射光检查设备执行。
34.优选地,透射光检查方法可以用在空瓶检测时,尤其是用在底部壁和/或侧壁检查时。然而,也能想到的是,透射光检查方法被用在全瓶检查时以识别漂浮的塑料部分,尤其是在侧壁检测时使用。
35.至少一个分析器可以作为分析器矩阵在物镜后并在矩阵传感器的光敏传感器元件前以如下方式将四个不同的线性偏振方向进行划分,即,使得四个不同的线性偏振方向在矩阵传感器的摄像机图像中被检测到。由此,可以特别简单地构建摄像机系统,这是因为四个不同的线性偏振方向用正好一个矩阵传感器来检测,而不是用多个矩阵传感器。
36.替选地,还能想到的是,四个不同的线性偏振方向由具有各一个分析器、物镜且分别具有矩阵传感器的至少四个摄像机来检测。由此,虽然需要更多的摄像机,但对容器的检测空间分辨率是更高的。
37.此外替选能想到的是,不同的线性偏振方向通过具有各一个物镜且具有各一个矩阵传感器的至少四个摄像机来检测,其中,至少一个分析器包括两个偏振分光器,用这些偏振分光器将至少四个不同的线性偏振方向中的两个分别划分给这至少四个摄像机中的两个。由此使得图像场可以分别由两个摄像机叠加而成,从而使相应的摄像机图像中的图像视角相似,甚至完全相同。
38.由此可以支持在评估时对摄像机图像中的容器上的图像区域的分配。
39.还能想到的是,利用摄像机系统通过滤光器检测偏振光的不同的光波长。由此使识别特别可靠,这是因为透明异物的偏振效应也会取决于光波长。由此可以改善对无色容器的识别。
附图说明
40.下面将参照附图中所示的实施例更详细地解释本发明的其他特点和优点。其中:
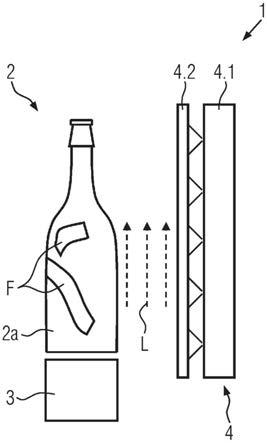
41.图1以侧视图示出透射光检查设备的根据本发明的实施例;
42.图2以前视图示出具有构造为分析器矩阵的分析器的矩阵传感器在细节图;
43.图3以侧视图示出透射光检查设备的根据本发明的另外的实施例,其具有四个摄像机,在摄像机前面分别布置有分析器;以及
44.图4以侧视图示出透射光检查设备的根据本发明的另外的实施例,其具有四个摄像机和两个偏振分光器。
具体实施方式
45.在图1中以侧视图示出了透射光检查设备1的根据本发明的实施例。可以看到运输机3和附属于该运输机的检查站4、5,检查站用于以偏振光l对容器2的侧壁2a进行透视。
46.运输机3在这里例如被构造为线性运输机,以便让容器2在照射装置4与摄像机系统5之间运输穿过。在此,容器2优选可以连续运输,并被摄像机系统5持续检测。
47.照射装置4包括光源4.1,其用于发出可见的和/或红外的光谱。例如,光源4.1构造有多个发射优选波长范围在380nm至780nm的白光的led。优选是使用含有用于不同颜色的多个芯片的led。这就能够实现灯色与容器的颜色相协调。还能想到的是,光源4.1构造有多个发射波长范围优选在780nm至3μm的红外光的led。
48.此外,光源4.1下游接有偏振器4.2,该偏振器被构造成用于对光源4.1发出的光谱进行圆偏振。通过偏振器4.2对光源4.1的非偏振光进行圆偏振,并且因此将其作为偏振光l发去。然而,也能想到的是,偏振器是线性或椭圆偏振器。
49.此外可以看到,摄像机系统5包括物镜5.3、分析器5.m和矩阵传感器5.2,其中,分析器5.m被构造为分析器矩阵,它被布置在物镜5.3与矩阵传感器5.2的光敏传感器元件(5.21)之间。由此可以在矩阵传感器5.2的摄像机图像中检测四个不同的偏振方向。此外,构造为分析器矩阵的分析器5.m被构造为矩阵传感器5.2的集成的元件。例如,矩阵传感器5.2和构造为分析器矩阵的分析器5.m可以是imx250mzr(单色)或imx250myr(彩色)类型的索尼图像传感器。下面将参照图2更详细地解释矩阵传感器5.2以及分析器5.m的结构。
50.利用物镜5.3,经由分析器5.m将容器2成像到摄像机系统5的矩阵传感器5.2上。因此,利用摄像机系统5可以在四个不同的偏振方向上空间分辨地同时检测容器2的侧壁2a。
51.也能想到的是,在摄像机系统5上游接有在这里没有更详细地示出的镜柜。由此可能的是,将多个容器侧面并排地作为图像扇区成像进入到摄像机系统5中。例如,利用镜柜和物镜5.3,使得容器2的来自不同视角的至少两个视图可以并排成像到矩阵传感器5.2上,并且因此在摄像机图像中被检测到。
52.此外,可以看到控制装置6,利用控制装置能控制照射装置4和摄像机系统5。能想到的是,控制装置6包括图像处理装置,用于评估来自摄像机系统5的摄像机图像。此外,还能想到的是,控制装置6例如基于来自光栅的信号来控制照射装置4,从而当容器2在照射装置4前面位于摄像机系统5的视野中时,照明装置发出光脉冲。
53.在图2中以前视图示出具有构造为分析器矩阵的分析器5.m的矩阵传感器5.2的细节图。可以看到矩阵传感器5.2,它在图1所示的摄像机系统中充当图像传感器。
54.矩阵传感器5.2相应于cmos或ccd图像传感器的常见结构,其中,光敏传感器元件5.21被布置在矩阵式的栅格中,以便拍摄摄像机图像。然而,光敏传感器元件5.21的六边形布置也是能想到的。
55.此外,在光敏传感器元件5.21前面布置有被构造为分析器矩阵的分析器5.m,其包
括多个布置成矩阵的偏振器元件5.ml
‑
5.m4。偏振器元件5.ml
‑
5.m4的矩阵在此相应于矩阵传感器5.2的光敏传感器元件5.21的定位。偏振器元件5.ml
‑
5.m4分别与光敏传感器元件5.21中的一个相配属,如在细节d中可以看到的那样,交替地沿四个不同的线性偏振方向取向。例如,偏振器元件5.ml
‑
5.m4相应地沿偏振方向0
°
,向40
°
、90
°
和135
°
布置。能想到的是,被构造成分析器矩阵的分析器5.m布置在微透镜阵列与矩阵传感器5.2的光敏传感器元件5.21之间。
56.此外,布置成矩阵的偏振器元件5.ml
‑
5.m4以如下方式分组,即,使得四个相邻布置的偏振器元件5.ml
‑
5.m4分别沿四个不同的线性偏振方向取向,并且形成一个组g。若干组g同样分别矩阵式布置。
57.还能想到的是,矩阵传感器5.2包括拜尔滤光器,以便除了进行偏振之外还在摄像机图像中分开颜色,并因此分开地检测不同的光波长。由此可以基于色彩信息更可靠地识别透明异物f。
58.由此,利用图2中所示的矩阵传感器可以在摄像机图像中检测到所有四个偏振方向。因此,图1中所示的透射光检查设备1可以特别容易地只用一台摄像机来构建。
59.利用图1和图2中所示的透射光检查设备1,容器2通过运输机3被运输到附属于该运输机的检查站4、5,并在那里用偏振光l进行透视。为此,来自光源4.1的最初非偏振光被偏振器4.2例如圆形偏振,并作为偏振光l发出。在透视时,光的偏振受到透明异物f的影响,例如由于应力双折射而转动。以这种方式被透视的容器2利用摄像机系统5检测,该摄像机系统包括矩阵传感器5.2和构造为分析器矩阵的分析器5.m。由此,在摄像机系统5的摄像机图像中同时检测到不同的线性偏振方向。于是,根据透明异物f的布置和特性而定地,与容器2的侧壁2a的其余区域相比,这些透明异物在摄像机图像中在特定的线性偏振方向的情况下显得更暗或更亮,从而它们可以用本身常见的图像处理方法进行识别。
60.在图3中以侧视图示出透射光检查设备1的根据本发明的另外的实施例,其具有四个摄像机5a
‑
5d,在摄像机前面分别布置有分析器5.fl
‑
5.f4。图3中所示的实施例与图1的实施例仅在摄像机系统5的结构上有所不同。因此,图1中的实施例中的照射装置4和运输机3的特征也相应地适用于图3,或也适用于下面的图4。
61.可以看出,摄像机5a
‑
5d的物镜5.3分别在前面布置有分析器5.fl
‑
5.f4。在此,它们例如是线性偏振滤光器,线性偏振滤光器围绕物镜5.3的轴线以如下方式扭转到不同的转动位置中,即,使得它们分别允许不同的线性偏振方向穿过,例如0
°
、45
°
、90
°
和135
°
方向。由此分别利用摄像机5a
‑
5d的一个可以检测其中一个线性偏振方向。因此,虽然构建更加复杂,但是仍能够实现摄像机图像中的更高的空间分辨率。
62.在图4中以侧视图示出透射光检查设备1的根据本发明的另外的实施例,其具有四个摄像机5a
‑
5d和两个偏振分光器5.t1
‑
5.t2。图4中的实施例与图3中的不同之处仅在于分析器的类型5.t1
‑
5.t2。在此,四个不同的线性偏振方向并不通过偏振滤光器而是通过所示的偏振分光器5.t1
‑
5.t2划分到四个摄像机5a
‑
5d上,据此,可以叠加摄像机5a、5b或5c、5d的图像场,从而使得相应的摄像机图像中的图像视角相似,甚至完全相同。由此可以支持在评估时对摄像机图像中容器2的图像区域的分配。
63.利用图3和图4中所示的透射光检查设备1,容器2利用运输机3被运输到附属于该运输机的检查站4、5,并在那里用偏振光l进行透视。为此,来自光源4.1的最初非偏振光被
偏振器4.2例如圆形偏振,并作为偏振光l发出。在透视时,光的偏振受到透明异物f的影响,例如由于应力双折射而转动或者沿特定的方向被吸收。以这种方式被透视的容器2利用四个摄像机5a
‑
5d在四个不同的线性偏振方向被检测。为此,在摄像机5a
‑
5b前面布置有偏振滤光器5.fl
‑
5.f4或偏振分光器5.t1
‑
5.t2。由此,在摄像机系统5的四个摄像机图像中分别同时检测不同的线性偏振方向。于是,根据透明异物f的布置和特性而定地,与容器2的侧壁2a的其他区域相比,这些透明异物在摄像机图像中在特定的线性偏振方向上显得更暗,从而它们可以用本身常见的图像处理方法进行识别。
64.由于在图1
‑
4的实施例中,摄像机系统5和至少一个分析器5.m、5.fl
‑
5.f4或5.t1
‑
5.t2被构造成用于同时识别四个不同的线性偏振方向,使得即使在高通量的容器处理设施情况下,也能以很小的耗费执行对容器2的侧壁2a的透射光检查。此外,弱偏振的异物f可以被特别可靠地识别出来。
65.应理解,前面描述的实施例中提到的特征并不限于这种特征组合,而是也能单独或以任何其他方式组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。