1.本实用新型涉及智能门锁领域,特别是一种全自动智能门锁。
背景技术:
2.在全自动智能门锁领域中,目前的全自动智能门锁大多都是使用全自动锁体或者机械锁体加背包电机的方式,全自动锁体是通过地磁定位或者通过设置时间实现电机转动开关锁,不够智能且价格较贵;而机械锁体加背包电机的驱动方式为背包电机驱动锁芯扁条,扁条联动锁芯的转动结构,驱动锁体里面的配合结构实现开门,这种方式需要的开锁时间较长、且容易出现开关锁卡死的现象。
技术实现要素:
3.针对背景技术中的机械锁体加背包电机的驱动方式存在开锁时间较长、且容易出现开关锁卡死的问题,本实用新型提供一种全自动智能门锁,也是采用机械锁体加背包电机的驱动方式,但是相较于背景技术中的开锁方式其开关锁时间较短、开关锁不容易出现卡死的问题,且进一步降低成本。
4.为实现上述实用新型目的,本实用新型采取的技术方案如下:
5.一种全自动智能门锁,包括锁体、方钢、背包电机、安装体、外部识别系统;安装体设置有让方钢穿过的第一穿孔;背包电机设置于安装体的内部;锁体设置于安装体的外部;所述背包电机设置有驱动孔;所述方钢的一端通过所述驱动孔和所述背包电机传动连接;所述锁体设置有方孔;所述方钢的另一端通过所述方孔和锁体传动连接;安装体的内部设置有控制系统;控制系统和外部识别系统以及背包电机电连接。
6.本专利的一种全自动智能门锁的控制系统和外部识别系统以及背包电机电连接,当外部识别系统识别开门的信号:指纹、密码、人脸、卡片等时,将这些信号传输至控制系统,控制系统再驱动背包电机实现开门,且锁芯扁条设置为方钢、锁芯设置为方孔,此种开锁方法只需要方钢转动方孔45度即可完成开锁,所需的开锁时间短,且开关锁不容易出现卡死,整体成本更低。
7.优选的,安装体朝向锁体的一面侧壁设置为挡板;第一穿孔设置于挡板上;挡板还设置有第一引线孔;控制系统通过所述第一引线孔和外部识别系统以及背包电机电连接。
8.优选的,安装体的另一面侧壁设置为后面板;后面板设置有第二定位孔和门锁把手。
9.优选的,安装体的内部还设置有喇叭;喇叭和控制系统电连接。
10.优选的,锁体还设置有钥匙孔;挡板还设置有第一定位孔;钥匙孔和第一定位孔位置相对应。
11.优选的,挡板背向锁体的一侧设置有盖板;盖板设置有第二引线孔和第二穿孔;第二引线孔和第一引线孔的位置相对应;第二穿孔和第一穿孔的位置相对应。
12.优选的,第二定位孔和驱动孔、方孔的位置相对应。
13.优选的,锁体还包括锁舌和弹性连接件;弹性连接件的一端和方孔弹性连接;弹性连接件的另一端和锁舌弹性连接。
14.优选的,第二定位孔和背包电机之间还填充有内挡片,第二定位孔的外部还设置有用于堵住第二定位孔的外挡片。
15.优选的,锁体还设置有安装孔和安装钩。
16.有益效果:
17.本实用新型的一种全自动智能门锁:
18.1.控制系统和外部识别系统以及背包电机电连接,当外部识别系统识别开门的信号:指纹、密码、人脸、卡片等时,将这些信号传输至控制系统,控制系统再驱动背包电机实现开门;
19.2.将背包电机与锁体之间的锁芯扁条设置为方钢、锁芯设置为方孔,此种开锁方法只需要方钢转动方孔45度即可完成开锁,所需的开锁时间短,且开关锁不容易出现卡死,整体成本更低。
附图说明
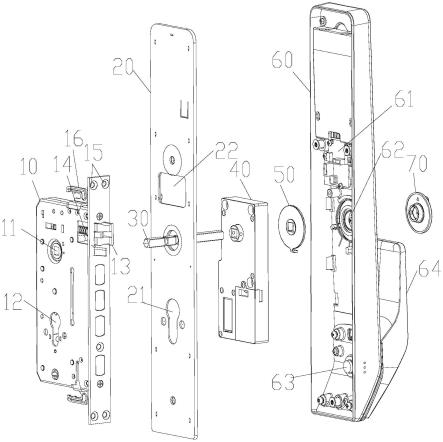
20.图1所示为本实施例的一种全自动智能门锁的爆炸图;
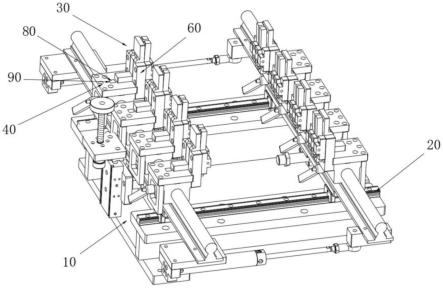
21.图2所示为图1的锁体和背包电机的其他视角图;
22.图3所示为图1的安装体的其他视角图;
23.图4所示为图1的后面板的结构图。
24.附图标记
25.10、锁体;11、方孔;12、钥匙孔;13、锁舌;14、弹性连接件;15、安装孔;16、安装钩;20、挡板;21、第一定位孔;22、第一引线孔;23、第一穿孔;201、盖板;202、第二引线孔;203、第二穿孔;30、方钢;40、背包电机;41、驱动孔;50、内挡片;60、安装体;61、控制系统;62、第二定位孔;63、喇叭;64、门锁把手;65、后面板;70、外挡片。
具体实施方式
26.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对照附图说明本实用新型的具体实施方式。显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
27.下面以具体实施例详细介绍本实用新型的技术方案。
28.实施例
29.如图1~4所示,本实施例的一种全自动智能门锁,包括锁体10、方钢30、背包电机40、安装体60、外部识别系统;安装体60设置有让方钢30穿过的第一穿孔23;背包电机40设置于安装体60的内部;锁体10设置于安装体60的外部;背包电机40设置有驱动孔41;方钢30的一端通过驱动孔41和背包电机40传动连接;锁体10设置有方孔11;方钢30的另一端通过方孔11和锁体10传动连接;安装体60的内部设置有控制系统61;控制系统61和外部识别系统以及背包电机40电连接。
30.具体地,驱动孔31的形状和方钢30的形状相匹配;方孔11的形状也和方钢30的形
状相匹配。
31.本实施例的一种全自动智能门锁的控制系统61和外部识别系统以及背包电机40电连接,当外部识别系统识别开门的信号:指纹、密码、人脸、卡片等时,将这些信号传输至控制系统61,控制系统61再驱动背包电机40实现开门,且锁芯扁条设置为方钢30、锁芯设置为方孔11,此种开锁方法只需要方钢30转动方孔11达到45度即可完成开锁,所需的开锁时间短,且开关锁不容易出现卡死,整体成本更低。
32.具体地,本实施例的一种全自动智能门锁,应用于门体,且锁体10背向安装体60的一侧安装于门体外的室外;安装体60背向锁体10的一侧安装于门体内的室内。
33.优选的,安装体60朝向锁体10的一面侧壁设置为挡板20;第一穿孔23设置于挡板20上;挡板20还设置有第一引线孔22;控制系统61通过第一引线孔22和外部识别系统以及背包电机40电连接。
34.优选的,安装体60的另一面侧壁设置为后面板65;后面板65设置有第二定位孔62和门锁把手64。
35.优选的,安装体60的内部还设置有喇叭63;喇叭63和控制系统61电连接。
36.具体地,当控制系统61接收到来自外部识别系统的开门信号时,喇叭63会发出提示声。
37.优选的,锁体10还设置有钥匙孔12;挡板20还设置有第一定位孔21;钥匙孔12和第一定位孔21位置相对应。
38.优选的,挡板20背向锁体10的一侧设置有盖板201;盖板201设置有第二引线孔202和第二穿孔203;第二引线孔202和第一引线孔22的位置相对应;第二穿孔203和第一穿孔23的位置相对应。
39.具体地,本实施例的一种全自动智能门锁可以配置传统的手动钥匙,用户可通过钥匙插入钥匙孔12实现手动拧钥匙开锁,且盖板201挡住第一定位孔21防止钥匙插入过深触碰到电机。
40.具体地,第一引线孔22和第二引线孔202是设置为让控制系统61连接外部识别系统的导线通过的。
41.优选的,第二定位孔62和驱动孔41、方孔11的位置相对应。
42.具体地,背包电机40内部设置有很多个互相啮合的齿轮以及一个旋转电机和一个马达,当背包电机40接收到来自控制系统61的信号时,马达启动发动旋转电机,旋转电机转动,使旋转电机联轴器连接的齿轮转动,进一步带动所有互相啮合的齿轮转动,最后驱动方钢30转动。
43.具体地,当方钢30的一端被背包电机40转动后,方钢30带动其另一端的方孔11转动。
44.优选的,锁体10还包括锁舌13和弹性连接件14;弹性连接件14的一端和方孔11弹性连接;弹性连接件14的另一端和锁舌13弹性连接。
45.具体地,当方孔11被方钢30带动而转动后,会使和其弹性连接的弹性连接件14收缩,进而带动弹性连接件14另一端的锁舌收缩,从而实现开门。
46.优选的,锁体10还设置有安装孔15和安装钩16。
47.具体地,安装孔15和安装钩16是为了方便本实施例的一种全自动智能门锁的实际
安装。
48.具体地,第二定位孔62和背包电机40的位置相对应,用于方便安装。且第二定位孔62和背包电机40之间还填充有内挡片50,第二定位孔62外部还设置有用于堵住第二定位孔62的外挡片70。
49.本实施例的一种全自动智能门锁:
50.1.控制系统61和外部识别系统以及背包电机40电连接,当外部识别系统识别开门的信号:指纹、密码、人脸、卡片等时,将这些信号传输至控制系统61,控制系统61再驱动背包电机40实现开门;
51.2.将背包电机40与锁体10之间的锁芯扁条设置为方钢30、锁芯设置为方孔11,此种开锁方法只需要方钢30转动方孔11达到45度即可完成开锁,所需的开锁时间短,且开关锁不容易出现卡死,整体成本更低。
52.以上对本实用新型所提供的一种全自动智能门锁的实施例进行了详细阐述。本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型的原理的前提下,还可以本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。