1.本实用新型涉及一种压力凝胶成型机,尤其涉及一种用于压力凝胶成型机的机械臂。
背景技术:
2.为了解决环氧树脂自动压力凝胶成型机缺少适用的机械臂,中国实用新型专利(cn204640669)公开了一种压力凝胶成型机的多功能辅助手臂,具有结构简单、稳定性好等优点。但是,这种多功能辅助手臂采用液压动力,是通过油缸提升基座,液压站功率需要在7.5kw以上,因此多功能辅助手臂的能耗和制造成本较高;由于多功能辅助手臂不能液压站停机状态下保持在提升位置,因此在成型机短时间停机时, 液压站仍需要保持开机状态,导致设备的能耗和运行成本增加。
技术实现要素:
3.本实用新型主要是解决现有技术所存在的设备能耗及成本较高的技术缺陷,提供一种节能高效、成本下降的用于压力凝胶成型机的机械臂。
4.本实用新型针对上述技术问题主要是通过下述技术方案得以解决的:本实用新型包括底板,固定于底板的轨道、基座以及固定于基座的转动臂,转动臂包括一端与基座铰接的后臂,与后臂远离基座一端铰接的前臂,其特征在于,还包括固定于底板的电机、与电机输出端连接的丝杆,基座与丝杆采用螺纹连接,电机驱动丝杆转动时基座沿轨道移动。
5.作为优选,后臂设置有与基座铰接的第一枢轴,基座设置有与第一枢轴连接的第一制动器。
6.作为优选,前臂设置有与后臂铰接的第二枢轴,后臂与前臂的铰接端设置有与第二枢轴连接的第二制动器。
7.作为优选,第一制动器和第二制动器采用失电制动器。
8.本实用新型结构简单,具有以下优点:
9.本实用新型中,基座通过电机驱动丝杆沿轨道丝杆提升,基座与丝杆采用螺纹连接结构,因而基座在电机停机情况下仍可保持提升位置不变,安全可靠;电机提升功率只需在0.75kw左右,而且运行时可即开即停,大大降低了能耗。同时,相比于价格较高的液压提升部件,本实用新型采用电机提升,制造成本大幅降低。
10.进一步地,在两个水平摆动关节上安装制动器,可有效控制机械臂在水平方向的定位;制动器采用失电制动器,仅在机械臂需要移动时通电,节省了电能,由于在失电状态下机械臂被制动,不会出现自行摆动,因而更加安全可靠。
11.因此,本实用新型具有结构简单、节能高效、安全可靠等优点。
附图说明
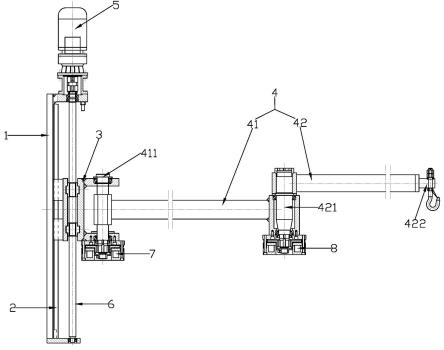
12.附图1是本实用新型一种优选实施例的示意图。
13.附图标记:1.底板;2.轨道;3.基座;4.转动臂;41.后臂;411.第一枢轴;42.前臂;421.第二枢轴;422.连接块;5.电机;6.丝杆;7.第一制动器;8.第二制动器。
具体实施方式
14.下面通过实施例,并结合附图,对本实用新型的技术方案作进一步具体的说明。
15.实施例1:如附图1所示,本实用新型包括底板1,固定于底板1的轨道2、基座3以及固定于基座3的转动臂4,固定于底板1的电机5、与电机5输出端连接的丝杆6,基座3与丝杆6通过螺纹结构相连接,电机5驱动丝杆6转动时基座3沿轨道2移动;
16.转动臂4包括一端与基座3铰接的后臂41,与后臂41远离基座3一端铰接的前臂42;
17.后臂41通过第一枢轴411与基座3铰接,第一枢轴411连接第一制动器7,第一制动器7用于限制第一枢轴411与基座3之间相对转动;
18.前臂42通过第二枢轴421与后臂41铰接,第二枢轴421连接第二制动器8,第二制动器8用于限制第二枢轴421与后臂42之间的相对转动,前臂42远离第二枢轴421的一端设置有用于连接夹具或吊钩的连接块422。
19.第一制动器7和第二制动器8采用失电制动器。
20.本实用新型在使用时,底板固定于压力凝胶成型机竖梁的外侧。当电机驱动丝杆旋转时,基座基于与丝杆的螺纹连接沿轨道上下移动,带动转动臂在竖直方向上下移动,准确调准需要安装的嵌件和需要拆卸的制品的竖直中心位置,同时通过控制第一枢轴和第二枢轴的转动,调准水平中心位置。
21.当然上述附图和实施例仅为了用于解释和说明本实用新型,并不能作为本实用新型的不当限定。凡本领域技术人员依据本实用新型做出等效调整与变化而得到的技术方案均落入本实用新型的保护范围。
技术特征:
1.一种用于压力凝胶成型机的机械臂,包括底板(1),固定于所述底板(1)的轨道(2)、基座(3)以及固定于所述基座(3)的转动臂(4),所述转动臂(4)包括一端与所述基座(3)铰接的后臂(41),与所述后臂(41)远离所述基座(3)一端铰接的前臂(42),其特征在于,还包括固定于底板(1)的电机(5)、与所述电机(5)输出端连接的丝杆(6),所述基座(3)与所述丝杆(6)采用螺纹连接,所述电机(5)驱动所述丝杆(6)转动时所述基座(3)沿所述轨道(2)移动。2.根据权利要求1所述的一种用于压力凝胶成型机的机械臂,其特征在于,所述后臂(41)设置有与所述基座(3)铰接的第一枢轴(411),所述基座(3)设置有与所述第一枢轴(411)连接的第一制动器(7)。3.根据权利要求1或2所述的一种用于压力凝胶成型机的机械臂,其特征在于,所述前臂(42)设置有与所述后臂(41)铰接的第二枢轴(421),所述后臂(41)与所述前臂(42)的铰接端设置有与所述第二枢轴(421)连接的第二制动器(8)。4.根据权利要求2所述的一种用于压力凝胶成型机的机械臂,其特征在于,所述第一制动器(7)采用失电制动器。5.根据权利要求3所述的一种用于压力凝胶成型机的机械臂,其特征在于,第二制动器(8)采用失电制动器。
技术总结
本实用新型涉及一种用于压力凝胶成型机的机械臂。本实用新型包括底板,固定于底板的轨道、基座以及固定于基座的转动臂,转动臂包括一端与基座铰接的后臂,与后臂远离基座一端铰接的前臂,还包括固定于底板的电机、与电机输出端连接的丝杆,基座与丝杆采用螺纹连接,电机驱动丝杆转动时基座沿轨道移动。本实用新型采用电机提升结构,转动臂的枢轴连接失电制动器,具有结构简单、节能高效、安全可靠等优点。点。点。
技术研发人员:纪开来 倪新祥 张龙 周浩 刘宗胜 沈颂三 韩志刚 张庆家
受保护的技术使用者:浙江旭实机电设备有限公司
技术研发日:2022.09.29
技术公布日:2023/2/6
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
