1.本实用新型涉及上肢外骨骼领域,具体是基于全向平台的6自由度上肢外骨骼。
背景技术:
2.自20世纪60年代外骨骼开始被研发至今,已由军事领域转向民用市场,多以医疗和工业生产为主要目的,作为帮助工人负荷执行制造、搬运任务的辅助工具,目前正在向负重能力更强、控制力和灵活性能更高的方向研发。目前,大多数国家的科研机构对外骨骼的研究尚处于基础起步阶段,上肢外骨骼产品特别是6自由度的产品仍然较少,主要应用领域为军事、民用和医疗,其中,比较领先的国家主要是美国和日本,法、俄、韩、以色列等国也在技术上有所建树,我国各科研机构也在奋起研发。因应对高负载复杂的操作工况,具有多自由度的大助力的灵活移动的上肢助力外骨骼产品成为了目前外骨骼产品细化发展的重点方向,6自由度上肢外骨骼产品结构复杂严苛,重量较重的特点,因此提出一种基于全向平台的6自由度上肢外骨骼对其进行优化。
技术实现要素:
3.本实用新型的目的在于提供基于全向平台的6自由度上肢外骨骼,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:
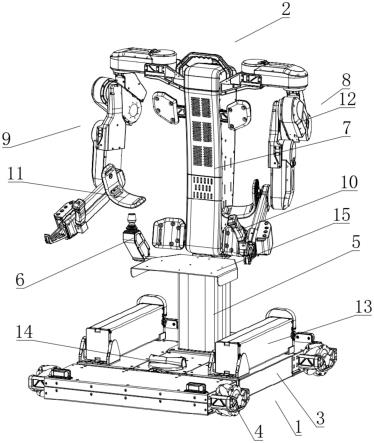
5.基于全向平台的6自由度上肢外骨骼,包括底部全向平台和6自由度上肢外骨骼,底部全向平台包括底盘框架,底盘框架上安装有四个全向轮驱动系统,通过四个全向轮驱动系统实现机器的整体移动,底盘框架的顶部后侧固定安装有升降柱,6自由度上肢外骨骼包括背板刚性结构主体、右侧3自由度上肢外骨骼和左侧3自由度上肢外骨骼,右侧3自由度上肢外骨骼和左侧3自由度上肢外骨骼对称安装在背板刚性结构主体的顶部,背板刚性结构主体安装在升降柱的顶部。
6.作为本实用新型进一步的方案:所述右侧3自由度上肢外骨骼和左侧3自由度上肢外骨骼结构件功能相同,通过左右臂的不同互为镜像安装,右侧3自由度上肢外骨骼和左侧3自由度上肢外骨骼均包括有手部末端控制杆、手臂托板和三个动力单元。
7.作为本实用新型再进一步的方案:所述手部末端控制杆安装在右侧3自由度上肢外骨骼和左侧3自由度上肢外骨骼的小臂部分前端内侧,右侧3自由度上肢外骨骼和左侧3自由度上肢外骨骼可读取手部末端控制杆的刚性力传感器信号,实现上肢助力,手臂托板安装在右侧3自由度上肢外骨骼和左侧3自由度上肢外骨骼的小臂部分后端内侧,三个动力单元相互连接。
8.作为本实用新型再进一步的方案:所述底盘框架的顶部两侧对称安装有动力电池单元,为整机提供动力,底盘框架的顶面前侧中部固定安装有升降柱控制踏板,实现对升降柱()的高低升降控制。
9.作为本实用新型再进一步的方案:所述升降柱的顶部前侧安装有座椅,座椅的一
侧固定安装有底盘操纵杆。
10.与现有技术相比,本实用新型的有益效果是:
11.1、本实用新型是一种基于全向平台的6自由度上肢外骨骼,使用者穿戴装置搬运或提起重物时,带刚性力传感器的手部末端读取压力信号,综合手臂外骨骼移动及力学信号,通过集成驱动单元驱动机械外骨骼部分传递双臂为提升重物提供助力,减少使用者上肢搬运重物时承受的压力,达到保护使用者手和肩部、减少职业伤害的直接目的,同时提高使用者耐力、提升工作效率。
12.2、本实用新型6自由度上肢外骨骼由刚性连接安装于带有升降柱的全向平台上,使使用者无需承担上肢外骨骼机器本身的自重,并通过操控底盘操纵杆和升降柱控制踏板,实现整机的组合全向移动和上下高度调节。
附图说明
13.图1为一种基于全向平台的6自由度上肢外骨骼的使用者手臂放下时的正视和侧视立体图。
14.图2为一种基于全向平台的6自由度上肢外骨骼的使用者手臂向两侧升起时正视和侧视立体图。
15.图3为一种基于全向平台的6自由度上肢外骨骼的使用者手臂向前升起时正视和侧视立体图。
16.图4为一种基于全向平台的6自由度上肢外骨骼的使用者手臂向上举起时正视和侧视立体图。
17.图5为一种基于全向平台的6自由度上肢外骨骼的其中左侧3自由度上肢外骨骼的运动范围顶视图。
18.图6为一种基于全向平台的6自由度上肢外骨骼的其中左侧3自由度上肢外骨骼的运动范围侧视图
19.图7为一种基于全向平台的6自由度上肢外骨骼的立体图。
20.图8为一种基于全向平台的6自由度上肢外骨骼的局部侧视图
21.图中:1、底部全向平台;2、6自由度上肢外骨骼;3、底盘框架;4、全向轮驱动系统;5、升降柱;6、底盘操纵杆;7、背板刚性结构主体;8、右侧3自由度上肢外骨骼;9、左侧3自由度上肢外骨骼;10、手部末端控制杆;11、手臂托板;12、动力单元;13、动力电池单元;14、升降柱控制踏板;15、座椅。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1~8,本实用新型实施例中,基于全向平台的6自由度上肢外骨骼,包括底部全向平台1和6自由度上肢外骨骼2,底部全向平台1包括底盘框架3,底盘框架3上安装有四个全向轮驱动系统4,通过四个全向轮驱动系统4实现机器的整体移动,底盘框架3的顶
部后侧固定安装有升降柱5,6自由度上肢外骨骼2包括背板刚性结构主体7、右侧3自由度上肢外骨骼8和左侧3自由度上肢外骨骼9,右侧3自由度上肢外骨骼8和左侧3自由度上肢外骨骼9对称安装在背板刚性结构主体7的顶部,背板刚性结构主体7安装在升降柱5的顶部。
24.右侧3自由度上肢外骨骼8和左侧3自由度上肢外骨骼9结构件功能相同,通过左右臂的不同互为镜像安装,右侧3自由度上肢外骨骼8和左侧3自由度上肢外骨骼9均包括有手部末端控制杆10、手臂托板11和三个动力单元12。
25.手部末端控制杆10安装在右侧3自由度上肢外骨骼8和左侧3自由度上肢外骨骼9的小臂部分前端内侧,右侧3自由度上肢外骨骼8和左侧3自由度上肢外骨骼9可读取手部末端控制杆10的刚性力传感器信号,实现上肢助力,同时右侧3自由度上肢外骨骼8和左侧3自由度上肢外骨骼9可信号显示左右手臂末端在三维方向上的受力大小,可用于分析使用者负载情况、位置变化、运动趋势,6自由度上肢外骨骼2可根据刚性传感器信号分别控制右侧3自由度上肢外骨骼8和左侧3自由度上肢外骨骼9上肢的三个动力单元12驱动左右手臂结构提供3自由度的综合助力,手臂托板11安装在右侧3自由度上肢外骨骼8和左侧3自由度上肢外骨骼9的小臂部分后端内侧,三个动力单元12相互连接。
26.底盘框架3的顶部两侧对称安装有动力电池单元13,为整机提供动力,底盘框架3的顶面前侧中部固定安装有升降柱控制踏板14,实现对升降柱5的高低升降控制。
27.升降柱5的顶部前侧安装有座椅15,座椅15的一侧固定安装有底盘操纵杆6。
28.为应对6自由度上肢外骨骼2产品结构复杂严苛,重量较重的特点,6自由度上肢外骨骼2刚性连接于全向平台1上,使整机可以成为为使用者提供一个更为灵活且无需使用者承担过多机器本身自重的平台。
29.右侧3自由度上肢外骨骼8和左侧3自由度上肢外骨骼9的端部均设有刚性力传感器,结合左右带刚性力传感器压力信号及左右集成驱动单元旋转位置、关节应力数据,可综合判断使用者左右手臂的运动和负载状况,提供综合助力。
30.右侧3自由度上肢外骨骼8和左侧3自由度上肢外骨骼9的端部可使用不同末端夹具针对不同使用场景中包括但不限于管材、线束、筒类、箱类等负载重物进行辅助固定搬运,减少使用者搬运重物时承受的压力,达到保护使用者手部腰部、减少工作环境中肌肉劳损的职业伤害的直接目的,同时提高佩戴者耐力、提升工作效率。
31.全向轮驱动系统4、升降柱5、底盘操纵杆6、背板刚性结构主体7、手部末端控制杆10、动力单元12、动力电池单元13和升降柱控制踏板14均为成熟机械产品结构,故不再详细赘述。
32.本实用新型的工作原理是:
33.使用时,右侧3自由度上肢外骨骼8和左侧3自由度上肢外骨骼9刚性连接于背部刚性结构主体7,并安装于底部全向平台1的升降柱5上,使用者通过控制底盘操纵杆6,实现对底部全向平台1上的四个全向轮驱动系统4的控制,从而实现整机的前进、后退、左右平移、左右旋转,使用者通过控制升降柱控制踏板14,实现对6自由度上肢外骨骼的上下高度调节。使用者手握手部末端控制杆10状态下,右侧3自由度上肢外骨骼8和左侧3自由度上肢外骨骼9可分别读取位于末端的刚性力传感器压力信号,6自由度上肢外骨骼可根据刚性传感器信号分别控制左右上肢的三个动力单元12左右手臂结构提供三自由度的综合助力。
34.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来
说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。