1.本发明涉及填充材料表面的测量。特别地,本发明涉及用于物位和拓扑检测的物位雷达、用于测量容器的物位和填充材料表面的拓扑的方法、程序元件以及计算机可读介质。
背景技术:
2.为了检测填充材料表面的拓扑,可以使用测量信号扫描填充材料表面。为此目的,机械地旋转测量装置或其天线,或者执行电子波束控制。也可以将两种方法混合。为进行电子波束控制,在雷达测量装置中使用辐射元件阵列。在这种情况下,该阵列也被称为阵列天线。
3.然后,可以根据检测的拓扑计算填充材料的物位和体积。
4.用于电子波束控制的硬件费用不可忽视;信号评估所需的计算工作量也可能相当大。出于这个原因,这种测量装置需要相对较大的能量。然而,取决于测量装置的使用地点和连接方式,能量通常是稀缺资源。
技术实现要素:
5.在此背景下,本发明的目的是提供一种用于物位和拓扑检测的物位雷达,其即使在有限可用能量的情况下也能提供可靠的测量结果。
6.该目的通过独立权利要求的特征来实现。本发明的改进示例在从属权利要求和实施例的以下说明中得出。
7.本发明的第一方面涉及一种用于物位和拓扑检测的物位雷达,并且尤其涉及用于工业环境中的过程自动化的物位雷达。物位雷达包括被配置为检测容器的物位的物位雷达单元或超声波单元。物位雷达还包括被配置为检测容器中的填充材料的填充材料表面的拓扑的拓扑雷达单元。设置有被配置为监测可用于测量的可用能量的能量管理单元。设置有控制电路,该控制电路被配置为在考虑可用能量的情况下调整物位雷达单元的测量和拓扑雷达单元的测量的时间顺序。
8.例如,在考虑最后测量的物位和/或最后测量的物位的变化速率的情况下执行物位雷达单元和拓扑雷达单元的测量的时间顺序。
9.例如,如果物位较低,则可以更频繁地执行拓扑测量或者可以触发在其它情况下不会在该时间发生的拓扑测量。当物位快速变化时,也可以降低拓扑测量的频率,以实现对变化的物位值的快速跟踪。
10.能量管理单元可以包括储能器,并被配置为在物位雷达单元的多个连续测量期间为储能器充电。
11.在此,这在物位雷达单元被设计为比拓扑雷达单元需要更少的能量用于测量的情况下是有帮助的。
12.特别是,物位雷达可被配置为与4至20ma接口连接。
13.根据本发明的实施例,物位雷达被配置为进行所谓的“反向操作”。在本文中,“反向操作”是指与“正常”配置相反,当容器为空时电流消耗为20ma(而不是4ma),并且当容器为满时电流消耗为4ma(而不是20ma)。
14.以此方式,当容器为空时,可以在物位测量期间收集足够的能量,以便能够尽可能快速地执行拓扑测量。
15.根据另一实施例,控制电路包括用于控制物位雷达单元的第一控制单元以及用于控制拓扑雷达单元的第二控制单元。此外,还设置有作为上级单元的第三控制单元,第三控制单元用于在考虑可用能量的情况下调整物位雷达单元和拓扑雷达单元的测量的时间顺序。用于拓扑测量和用于物位测量的所述单元可被设计为自给式单元,它们仅通过控制线从第三控制单元接收“立即测量”的信号。例如,这可以以从“0”变为“1”的状态变化的形式发生。
16.特别地,用于物位测量和拓扑测量的所述单元可以包括分别控制整个单元的第一控制单元和第二控制单元。
17.根据另一实施例,物位雷达包括被配置为检测物位的第一天线装置以及被配置为检测拓扑的第二天线装置。通常,两个天线装置不设置为“重叠”。例如,第一天线装置是相对较大的天线喇叭,而第二天线装置是例如围绕天线喇叭布置的更小辐射元件的阵列。
18.根据另一实施例,经由第二天线装置发射fmcw雷达信号,并且经由第一天线装置发射脉冲信号。
19.例如,脉冲信号可以是雷达信号或超声波信号。
20.物位雷达包括天线系统。例如,天线系统具有第一天线装置,第一天线装置被配置为检测填充材料表面的拓扑。此外,天线系统例如具有附加的第二天线装置,第二天线装置被配置为检测物位。因此,将不同的天线装置用于物位测量和拓扑检测。
21.第一天线装置是阵列天线,其具有围绕第二天线装置布置的辐射元件的阵列。
22.例如,第二天线装置是喇叭天线。
23.第一天线装置的辐射元件也可以是(更小的)喇叭天线。第一天线装置和第二天线装置也可被称为喇叭辐射器,并且可以填充有电介质。它们也可以是波导孔的形式(填充或未填充)。也可以使用贴片天线、棒状辐射器或其他天线。
24.根据一实施例,第一天线装置的辐射元件的直径或边长(明显)小于第二天线装置的直径或边长。
25.根据另一实施例,第一天线装置的辐射元件的辐射面和第二天线装置的辐射面布置在同一平面上。例如,第二天线装置的“辐射面”是天线喇叭的开口。在喇叭天线的情况下,第一天线装置的辐射元件的辐射面也是各个天线喇叭的开口的平面。在平面辐射元件(贴片天线)的情况下,辐射面由平面辐射元件的表面形成。
26.根据另一实施例,第一天线装置的辐射元件的辐射面和/或第二天线装置的辐射面是金属板中的孔。这些孔可以填充有电介质,或者不填充。孔可以具有圆形的或有角的横截面。
27.例如,金属板被设计为圆形。
28.例如,第一天线装置的辐射元件形成矩形、六边形或具有分段直线区域的其他多边形形状。
29.根据一实施例,第一天线装置的辐射元件包括(第一)发射元件组和(第二)接收元件组。
30.本发明的另一方面涉及一种雷达测量装置,特别是物位雷达测量装置,其具有上述和下述的天线系统。
31.例如,物位雷达被配置为利用第一天线装置发射fmcw雷达信号并利用第二天线装置发射脉冲信号。
32.本发明的另一方面涉及一种用于测量容器的物位和填充材料表面的拓扑的方法,在该方法中,利用物位雷达的物位雷达单元对容器的物位进行一次或连续多次检测。在此,持续监测可用能量,并且在考虑可用能量的情况下判定何时检测拓扑。在该判定中也可以考虑其他情况,例如当前物位或当前物位变化率。如果这时判定现在应检测拓扑,则利用物位雷达的拓扑雷达单元检测填充材料表面的拓扑。
33.本发明的另一方面涉及一种程序元件,其当在物位测量装置或物位雷达的处理器上被执行时指示物位测量装置执行上述和下述的步骤。
34.本发明的另一方面涉及存储有上述程序元件的计算机可读介质。
35.术语“工业环境中的过程自动化”可以理解为技术的一个子领域,其包含无人工参与的操作机器和设备的所有措施。过程自动化的一个目标是在化学、食品、制药、石油、造纸、水泥、航运或矿业等领域中使工厂的各个部件的交互自动化。为此,可以使用大量的传感器,这些传感器特别适用于过程工业的诸如机械稳定性、对于污染物的不敏感性、极端温度、极端压力等特定要求。通常将这些传感器的测量值传送到控制室,在控制室中可以监测诸如物位、极限物位、流量、压力或密度等过程参数,并且可以手动或自动更改整个工厂的设置。
36.工业环境中的过程自动化的一个子领域涉及物流自动化。在物流自动化领域中,借助于距离传感器和角度传感器使建筑物内部或外部或者单个物流设备内的过程自动化。典型的应用是例如用于以下领域的物流自动化系统:机场的办理行李和货物托运处理领域、交通监测领域(收费系统)、贸易领域、包裹配送或还有建筑物安全(访问控制)领域。先前列出的示例的共同点在于,各个应用端都需要将存在检测与对象大小和位置的精确测量结合起来。为此,可以使用借助于激光、led、2d相机或3d相机的基于光学测量方法的传感器,这些传感器根据渡越时间原理(tof:time of flight)检测距离。
37.工业环境中的过程自动化的另一子领域涉及工厂/制造自动化。在诸如汽车制造业、食品制造业、制药业或一般包装行业等许多行业中,都可以见到这种应用示例。工厂自动化的目的是使通过机器、生产线和/或机器人执行的货物生产自动化,即,在没有人工参与的情况下运行。在此使用的传感器以及在检测对象的位置和大小时对于测量精度的特定要求与上述物流自动化示例中的传感器和特定要求相当。
38.下面将参考附图来说明本发明的其它实施例。如果在以下附图说明中使用了相同的附图标记,则它们表示相同或相似的元件。附图中的图示是示意性的,并且未按比例绘制。
附图说明
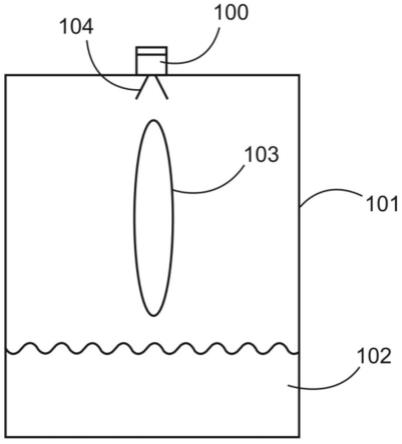
39.图1a示出了物位雷达测量装置。
40.图1b示出了检测填充材料表面拓扑的雷达测量装置。
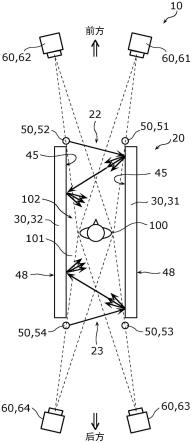
41.图2a示出了根据一实施例的雷达测量装置。
42.图2b示出了图2a的产生不同的发射波瓣的雷达测量装置。
43.图3示出了根据一实施例的物位雷达。
44.图4示出了根据一实施例的方法的流程图。
具体实施方式
45.图1a示出了安装在容器101中的具有喇叭天线104的物位雷达100。填充材料102位于容器101中。
46.天线104在填充材料102的方向上发射雷达波束103。填充材料可以是液体或松散材料。雷达信号在填充材料表面上受到反射,并然后被天线104接收。然后,可通过专用评估电路来确定距填充材料102的距离。
47.图1b示出了检测拓扑的物位测量装置,其通过光学方法、声学方法或基于雷达的方法扫描松散材料表面106b。在下文中,特别考虑利用电子或数字波束扫掠(strahlschwenkung)来检测拓扑的雷达装置105。在这些装置中使用多个雷达通道,它们可以通过对发射通道的不同控制和/或对接收通道的不同评估来执行主发射方向108的波束扫掠。这种装置通过相关的天线或天线系统107、203而具有多个发射和接收通道。
48.图2a示出了物位雷达201,其具有物位天线203和可用于电子波束控制的天线阵列203。借助于该测量装置可以扫描填充材料表面。也可以识别容器壁上的粘附物201。
49.图2b示出了如何改变天线阵列203的主辐射方向。
50.图3示出了这种物位雷达201的详细视图。物位雷达201包括可检测例如松散材料堆106(参见图2a和图2b)的拓扑的拓扑雷达单元302以及可测量物位的物位雷达单元305。这些单元可以在电路方面分开设计,并且可以相互独立地操作。此外,还设置有上级控制单元303,其可以以与可设定参数无关的方式开启用于检测拓扑的雷达单元或用于确定物位的雷达单元304或者同时开启这两个单元。
51.该装置的优点是除物位值之外还可提供额外信息。例如,这种装置可用于松散材料容器101,并识别容器壁上的粘附物202。物位测量装置通常不能识别粘附物。容器壁上的粘附物还导致容器不稳定。此外,在填充容器时必须考虑容器壁上的粘附物。当订购特定数量的材料时,订购量基于当前的物位值。然而,如果在容器101中形成了较大的粘附物,则订购的材料不能完全装入到容器中,且在最坏的情况下必须丢弃。
52.在此,物位雷达单元304可被设计为雷达装置100的形式。例如,物位雷达单元包含具有天线305的单站fmcw或脉冲雷达,该天线输出距填充材料的距离的值。拓扑雷达单元302代表包括电子波束扫掠类型(相控阵、数字波束成形)的雷达装置。在这种情况下,需要多个天线元件306a至306f以及相应数量的发射和/或接收通道。例如,可以将被扫描的松散材料表面106b、体积、容器中的粘附物202的指示等看作输出。
53.拓扑雷达单元和物位雷达单元的工作频率范围也相互独立。例如,单元302、304在不同的频率范围内工作,以在通道之间同时操作时减少干扰和相应的干扰信号。例如,拓扑雷达单元302可以在80ghz的范围内操作,而物位雷达单元304可以在180ghz的范围内操作。
54.两个单元302、304都可以根据fmcw原理操作。在此,它们的扫掠参数(带宽、斜坡陡
度等)可能不同。两个单元的调制类型也可能根本不同,因此例如物位雷达单元304作为脉冲雷达操作,而拓扑雷达单元302根据fmcw原理进行操作。
55.在此,控制单元303可以由微型控制器或fpga来实现。该单元是可调节的,并且能够控制测量速率。例如,可预定义的测量周期可以由以下部分组成:在一秒的网格(raster)内执行15次物位测量,并然后进行拓扑检测测量。在此,拓扑检测测量的持续时间例如可以是几百毫秒。
56.可以根据可用能量调节时间网格。例如,在过程工业领域中,物位雷达100、105、201通常利用双线接口312操作。在此,只有非常有限的能量可用于操作该装置。通过经由能量监测单元301接收关于当前可用能量的信息,控制单元303可根据可调整的预定参数来调整该网格。
57.拓扑检测雷达单元302的能耗明显高于物位雷达单元304的能耗。出于这个原因,提出了上述测量网格。物位测量期间可用的多余能量可以暂时存储在储能器中(该储能器可放置在单元301中),并在拓扑检测雷达测量时再次使用。
58.从过程测量技术的角度来看,这种栅格也是有意义的。与粘附物202相比,物位可以是快速变化的。而且,粘附物202经常经历缓慢变化的增长过程。因此,为物位测量选择比拓扑检测或粘附物识别的测量速率更高的测量速率是有意义的。
59.图3的示例性实施例示出了物位雷达201的内部结构。控制单元303通过连接线307连接到能量管理单元301并由其供电。还通过连接线307交换关于当前可用能量的信息。此外,控制单元303连接到物位检测单元304和拓扑检测单元302。通过连接线311和308双向地交换数据。控制单元303还通过连接线311和308发送控制信号,通过这些连接线可以打开和关闭单元304和302。此外,例如可以将单元304或其他单元的测量结果发送到控制单元303。能量管理单元301通过线路310和309向单元304和302供电。
60.物位雷达单元304具有发送/接收天线305,发送/接收天线305可以用于发送和接收高频雷达信号。
61.拓扑雷达单元302具有多个独立的天线元件306a至306f,这些天线元件也可以用于发送和接收高频雷达信号。所有天线元件305、306a至306f可以组合成整个天线系统203。
62.能量管理单元301具有接口312,可以通过该接口向装置201供电。此外,也可以通过该接口将测量数据(物位、体积、有关粘附物的信息等)传输到过程控制系统。能量管理单元从控制单元303接收该数据。在这种情况下,能量管理单元是抽象单元。能量管理单元的控制任务也可能由控制单元接管。例如,该功能可以由微型处理器接管。
63.在另一实施例中,测量间隔可以由用户预定。例如,可以在用户预定参数中设定是否例如进行如下分割:80%的拓扑测量和20%的物位测量、50%的拓扑测量和50%的物位测量、100%的拓扑测量和0%的物位测量或者还有0%的拓扑测量和100%的物位测量。
64.当然,只有当能量管理单元及其储能器中有足够的能量可供测量时,才能满足这些预定参数。然后,在此基础上确定相应的周期时间。由于物位测量比拓扑测量需要更少的能量,因此100%的物位测量中的测量速率可能高于100%的拓扑测量中的测量速率。
65.此外,可以确定拓扑测量和物位测量之间的百分比分配发生变化时的时间。例如,可以在夜间比白天更频繁地测量拓扑。
66.在另一示例性实施例中,测量速率的调节取决于物位。例如,在物位快速变化时,
可以降低拓扑测量的频率,以快速跟踪变化的物位值。
67.在容器几乎为空时,表面拓扑的确定能够提供比容器几乎填满时更多的信息。因此,特别地,当容器变空时,可以缩短两次拓扑测量之间的持续时间。
68.也可以相同地设定4至20ma接口,以便反向使用特性曲线。通常,空容器以4ma的电流消耗向外部发出信号,而满容器以20ma的电流消耗向外部发出信号。但是,当容器为空时消耗20ma的电流,当容器为满时消耗4ma的电流。通过以这种方式使特性曲线反向,可以在端电压保持不变的情况下实现物位测量装置在容器变空时接收到越来越多的能量,然后可以使用该能量来减少两个拓扑测量之间的时间间隔。通过相应的设定,可以在评估装置(例如,plc)中再次补偿物位测量装置的反向操作而不会出现大问题。
69.在另一实施例中,用于物位测量和拓扑测量的物位雷达可以从集成在装置中的储能器和/或能量收集模块中获取其操作所需的所有能量。在这种情况下,该装置补充有可由控制电路设定的实时时钟。特别地,可以设定物位测量或拓扑测量的下一时间点。在到达相应的时间点之后,激活相应的单元并确定相关的测量值。例如,以无线方式将测量值向外传输到云端。此外,可在非易失性存储元件中存储关于在实时时钟执行的下一次激活之后应将两个可用雷达单元中的哪一者用于测量的信息。
70.因此,物位雷达201具有物位确定雷达单元和拓扑检测雷达单元,所述单元分别通过控制单元以可预定的时间顺序并行或顺序地操作。
71.在考虑可用能量(控制单元从能量管理单元接收该信息)的情况下,控制单元可以确定拓扑雷达单元应何时进行下一次测量。
72.图4示出了根据一实施例的方法的流程图。在步骤401中,用物位雷达的物位雷达单元多次检测容器的物位。在步骤402中,监测可用能量,并且在步骤403中,在考虑可用能量的情况下,判定现在要检测拓扑。然后,在步骤404中,用物位雷达的拓扑雷达单元检测填充材料表面的拓扑。物位雷达单元和拓扑雷达单元具有不同的天线并且分别具有自己的控制单元,如有必要,另一控制单元可以是这些控制单元的上级单元,以便控制时间顺序。
73.还应注意,“包括”或“具有”不排除其他元件和步骤,“一”或“一个”不排除多个。此外,应注意,已经参考其中一个上述示例性实施例说明的特征或步骤也可以与上述其他示例性实施例的其他特征或步骤组合使用。权利要求中的附图标记不应被解释为限制性的。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。