1.本发明涉及斑马鱼胚胎细胞的非线性粘弹性力学模型的构建方法,属于非线性粘弹性力学分析技术领域。
背景技术:
2.粘弹性模型中的应力与应变呈线性的关系,即在一定时间内,应力与应变有比例关系并且可以叠加。在粘弹性的模型里,杨氏模量通常用弹簧来表示,粘性通常用阻尼来表示,通过它们之间的不同组合就可以得到各种模型。粘弹性模型中的经典形式为:麦克斯韦(maxwell)模型和开尔文-沃格特(kelvin
–
voight)模型,麦克斯韦模型由弹簧和阻尼器串联构成,开尔文-沃格特模型由弹簧和阻尼器并联构成。标准线性实体模型既能描述材料蠕变,也能描述材料的应力松弛。以往采用线性粘弹性力学模型来描述显微注射过程中斑马鱼胚胎细胞的力学行为,但是效果不佳,均方根误差等比较大,无法准确地描述细胞的力学行为。
3.蚁狮算法是seyedali mirjalili提出来的一种群体智能优化算法,该算法模拟了自然界中蚁狮捕猎蚂蚁的行为,通过蚂蚁的随机游走和陷阱的变化来实现优化问题的求解,具有精度高、不易陷入局部最优解等优点。
4.在利用粘弹性理论建立细胞模型时,研究中大多采用是线性的粘弹性模型,并假设变形与穿刺力之间的关系是线性的。但是现在已有一些研究者对细胞的粘弹性参数和细胞生物学之间进行了研究,发现并不是所有的细胞都表现为线性粘弹性,所以线性粘弹性模型并不能准确地描述斑马鱼胚胎细胞在显微注射过程中的力学行为。因此,建立斑马鱼胚胎细胞的非线性粘弹性力学模型,可以提高描述显微注射过程中斑马鱼胚胎细胞力学行为的准确度。
5.在模型参数的求解过程中,模型参数的优化是提高模型描述注射过程中细胞力学行为的准确度的关键。传统的参数优化一般基于泛化误差估计和梯度下降,在关键数据的匹配上还是存在很大的误差。因此,使用改进的蚁狮优化算法对模型进行求解,提高了一些关键数据上的匹配度。针对穿破细胞时的数据比穿刺过程中的数据更重要的特点,在算法适应度函数设定中,提出一种新型函数loss,这种函数既能描述整体数据也能描述关键数据的匹配程度,从而能得到非线性模型的最佳参数。
技术实现要素:
6.本发明的技术目的在于提出了斑马鱼胚胎细胞的非线性粘弹性力学模型的构建方法,针对于线性粘弹性力学模型无法准确描述显微注射过程中斑马鱼胚胎细胞的力学行为的问题,采用非线性粘弹性模型显著提高了模型的准确度。
7.为实现上述目的,本发明采用的技术方案为斑马鱼胚胎细胞的非线性粘弹性力学模型的构建方法,步骤如下所示:
8.步骤1:将非线性弹簧元件和麦克斯韦单元并联,建立描述显微注射过程中斑马鱼
胚胎细胞的注射力与注射速度、细胞变形量之间关系的非线性粘弹性力学模型方程;
9.步骤2:进行若干次实验,通过实验,得到在不同注射速度下整个显微注射过程中的注射力和细胞变形量的数据;
10.步骤3:修改蚁狮算法的适应度函数,根据步骤2的实验数据完成模型参数的求解,建立起注射过程中注射力与注射速度、细胞变形量之间的关系,完成斑马鱼胚胎细胞的非线性粘弹性力学模型的构建。
11.进一步的,所述步骤1中,注射力是在显微注射过程中注射针对胚胎细胞产生的力,等效于力学模型中非线性和麦克斯韦单元两部分受到的力的和;细胞变形量等效于整个力学模型的变形量。
12.进一步的,所述的斑马鱼胚胎细胞等效非线性粘弹性力学模型由一个刚度为ke、非线性系数为ε的非线性弹簧和麦克斯韦单元并联而成,其中麦克斯韦单元由一个刚度为k的弹簧和一个阻尼系数为η的阻尼串联而成。
13.进一步的,建立显微注射过程中的斑马鱼胚胎细胞的非线性粘弹性力学模型的推导步骤为:
14.1)非线性弹簧在注射过程中受到的力fe与变形量x之间的关系为:
15.fe=kex εkex3ꢀꢀꢀꢀ
(1)
16.其中ke是非线性弹簧的刚度,ε是非线性系数。
17.2)麦克斯韦单元在注射过程中的弹簧力f1与弹簧变形x1之间的关系为:
18.f1=kx1ꢀꢀꢀꢀꢀ
(2)
19.其中k是麦克斯韦单元的弹簧刚度。
20.3)麦克斯韦单元在注射过程中的阻尼力f1与阻尼变形x2之间的关系:
21.f1=ηv=η(dx2/dt)
ꢀꢀ
(3)
22.其中η是麦克斯韦单元的阻尼常数,v是注射速度,t是注射时间。
23.4)整个系统的变形x:
24.x=x1 x2ꢀꢀꢀꢀ
(4)
25.5)从上面的表达式可以得到麦克斯韦单元的表达式,并对其进行拉普拉斯变换如下:
[0026][0027][0028]
6)由于x(t)=vt,v是常数,拉普拉斯变换x(s)=v/s2,所以拉普拉斯变换后的公式(6)可以表示为:
[0029]
f1=η(1-e-(k/η)t
)v
ꢀꢀꢀꢀꢀ
(7)
[0030]
7)注射力f为非线性弹簧受到的力fe与麦克斯韦单元受到的力f1之和,注射速度v在整个显微注射的过程中是不变的,则注射力f与注射速度v、变形量x之间的关系为:
[0031]
f=fe f1=kex εkex3 η(1-e-(k/η)t
)v
ꢀꢀꢀ
(8)
[0032]
其中需要求解的模型参数是ke、ε、η、k,有了模型参数后,就可以建立起注射力与注射速度、细胞变形量之间的关系。
[0033]
进一步的,所述步骤2中,一共进行了11种速度的显微注射实验,11种速度分别为
100μm/s、200μm/s、300μm/s、400μm/s、500μm/s、600μm/s、700μm/s、800μm/s、900μm/s、1000μm/s、1700μm/s。每种速度下在不同胚胎上重复注射10次,记录注射力和细胞变形后取它们的平均值。
[0034]
进一步的,所述步骤3中,蚁狮算法运行的具体步骤为:
[0035]
1)随机产生蚂蚁的位置,并进行随机游走,随机游走的过程表达式为:
[0036]
x(t)=[0,cumsum(2r(t1)-1),cumsum(2r(t2)-1),...,cumsum(2r(tn)-1)]
ꢀꢀꢀ
(9)
[0037]
该公式中:cumsum为累积函数,n是最大迭代次数,t为当前迭代次数,rand是[0,1]上的随机数。
[0038]
2)将蚂蚁的位置限制在一定搜索空间中,需要对其进行归一化处理:
[0039][0040]
该公式中:ai和bi分别表示第i只蚂蚁所在的最小位置和最大位置,和分别表示在第t次迭代中第i只蚂蚁所在的最小位置和最大位置。
[0041]
3)蚂蚁行走会受到蚁狮陷阱的影响步入陷阱,表达式为:
[0042][0043]
该公式中:代表第j只蚁狮在第t次迭代中的位置。
[0044]
4)在蚂蚁落入了蚁狮的陷阱后,它行走的半径将会缩小,模型表达式为:
[0045][0046]
该公式中:i是一种自适应迭代因子,它的公式如下:
[0047][0048]
5)在蚁狮捕猎成功后,可以认为蚂蚁所在位置更适合捕食,蚁狮将更新到蚂蚁的位置,表达式为:
[0049][0050]
该公式中:f(
·
)为适应度函数。
[0051]
6)每次迭代中适应度最高的蚁狮为精英蚁狮,蚂蚁的随机游走受到轮盘赌选择的蚁狮和精英蚁狮共同影响,蚂蚁的位置为:
[0052][0053]
该公式中:为第t次迭代中第i只蚂蚁的位置,表示蚂蚁受到的轮盘赌选择的蚁狮的影响,表示蚂蚁受到的精英蚁狮的影响。
[0054]
进一步的,所述步骤3中,对蚁狮算法中的适应度函数进行修改。新的适应度函数
loss包括两部分:一部分为全部数据的均方误差loss1,表示对全部数据的匹配程度;另一部分为穿破胚胎细胞那一时刻数据的均方误差loss2,表示穿破时刻数据的匹配程度。新的适应度函数表示为:
[0055][0056]
其中i为全部数据的个数,j为穿破胚胎细胞那一刻数据的个数。新的适应度函数越小,模型对注射过程的拟合程度就越高,适应度就越高。那么,式(14)转变成:
[0057][0058]
该公式中:f(
·
)=loss。
[0059]
进一步的,所述步骤3中,所有的蚂蚁和蚁狮都处在4维空间中,4个维度对应非线性粘弹性模型的4个需要求解的模型参数ke、ε、η、k。利用改进的蚁狮算法完成对非线性粘弹性模型的4个模型参数ke、ε、η、k进行求解,具体步骤为:
[0060]
1)数据初始化。设定各个模型参数的范围为0到10,最大迭代次数为600。在4维空间随机产生50组模型参数作为蚂蚁的50个位置,存入矩阵m
ant,
随机产生50组模型参数作为蚁狮的50个位置,存入矩阵m
antion
,蚂蚁和蚁狮的位置矩阵如下:
[0061][0062][0063]
其中i∈[1,50],j∈[51,100]。
[0064]
2)设置适应度函数为改进后的适应度函数loss,然后计算蚁狮的位置矩阵中每组模型参数的适应度函数值,将蚁狮的位置矩阵中适应度最高的一组模型参数作为目前的最优解b
best
,即精英蚁狮。
[0065]
3)蚂蚁的位置矩阵m
ant
中的每一组模型参数ai,通过轮盘赌的方式选择蚁狮位置矩阵中的一组模型参数bj后,围绕着bj和b
best
根据式(11)随机游走,并根据式(15)完成模型参数ai的更新。
[0066]
4)比较步骤3)中的ai和bj两组模型参数的适应度函数值,根据式(17),更新模型参数bj后,计算出本次迭代蚁狮位置矩阵中适应度最高的一组模型参数作为目前新的最优解b
best
,即新的精英蚁狮。
[0067]
5)判断是否达到最大迭代次数。如果已经达到最大迭代次数,则输出最后一次迭代中适应度最高的一组模型参数(精英蚁狮位置)作为最优解b
best
,即为模型的4个参数的最优解;如果还未达到最大迭代次数,则重复进行步骤3和步骤4。
[0068]
经过步骤3,即可求解出力学模型中ke、ε、η、k,从而建立起显微注射过程中注射力
f与注射速度v、变形量x之间的关系,完成力学模型的搭建。
[0069]
本发明的有益效果是:
[0070]
本发明建立的非线性粘弹性力学模型的均方根误差、决定系数等远低于线性粘弹性模型,能够准确地描述显微注射过程中斑马鱼胚胎细胞的力学行为。
[0071]
与使用传统的最小二乘法相比,本发明使用蚁狮算法求解参数得到的非线性粘弹性模型的均方根误差、决定系数等明显减小,对斑马鱼胚胎细胞的力学行为描述也更准确。
[0072]
本发明对蚁狮算法的适应度函数进行的改进既能考虑到模型对整个注射过程中细胞力学行为的描述,又能考虑到模型对穿破细胞那一刻的细胞力学行为的描述,与未进行修改得到的模型相比,其均方根误差、决定系数等明显减小。
附图说明
[0073]
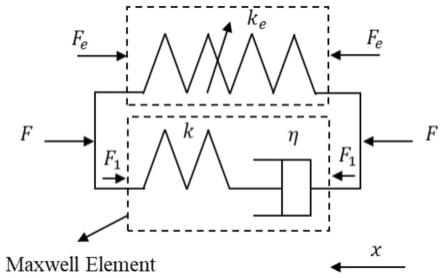
图1是斑马鱼胚胎细胞的非线性粘弹性力学模型的构建方法的非线性粘弹性力学模型示意图。
[0074]
图2是斑马鱼胚胎细胞的非线性粘弹性力学模型的构建方法的不同模型结果对比示意图。
[0075]
图3是斑马鱼胚胎细胞的非线性粘弹性力学模型的构建方法的不同模型结果对比示意图。
具体实施方式
[0076]
以下结合附图和实例对本发明进行详细说明。
[0077]
本发明提出了一种显微注射过程中斑马鱼胚胎细胞的非线性粘弹性模型的构建方法,用非线性弹簧代替线性弹簧以模拟斑马鱼胚胎细胞显微注射下的非线性行为,并通过改进的蚁狮优化算法对模型进行求解,能够实现准确地描述显微注射过程中斑马鱼胚胎细胞的力学行为。模型结构包括:一个非线性弹簧和一个麦克斯韦单元,其中非线性弹簧是在线性弹簧的基础添加了一个非线性系数。
[0078]
本发明提出了一种基于改进蚁狮优化算法的斑马鱼胚胎细胞的非线性粘弹性模型的构建方法,步骤如下所示:
[0079]
步骤1、将非线性弹簧元件和麦克斯韦单元并联,建立描述显微注射过程中斑马鱼胚胎细胞的注射力与注射速度、细胞变形量之间关系的细胞等效非线性粘弹性力学模型方程;
[0080]
步骤2、通过大量的实验,得到在不同注射速度下整个显微注射过程中的注射力和细胞变形量的数据,建立注射力与细胞变形量在不同的注射速度下的关系曲线;
[0081]
步骤3、利用改进的蚁狮优化算法对模型参数求解,完成描述显微注射过程中斑马鱼胚胎细胞力学行为的非线性粘弹性力学模型的建模过程。
[0082]
其中,注射力是在显微注射过程中注射针对胚胎细胞产生的力,等效于力学模型中非线性和麦克斯韦单元两部分受到的力的和;细胞的变形量在此处等效于整个力学模型的变形量。
[0083]
在显微注射过程中斑马鱼胚胎细胞的非线性粘弹性力学模型的参数指的是非线性弹簧刚度ke、非线性系数ε、麦克斯韦单元阻尼系数η、麦克斯韦单元弹簧刚度k,有了模型
参数后,就可以建立起注射力与注射速度、细胞变形量之间的关系。
[0084]
步骤1中,所述的斑马鱼胚胎细胞等效非线性粘弹性力学模型由一个刚度为ke、非线性系数为ε的非线性弹簧和麦克斯韦单元并联而成,其中麦克斯韦单元由一个刚度为k的弹簧和一个阻尼系数为η的阻尼串联而成,如图1所示。注射力使非线性弹簧和麦克斯韦单元产生相同的变形量x,也是整个力学模型的变形量。
[0085]
步骤1,建立显微注射过程中的斑马鱼胚胎细胞的非线性粘弹性力学模型的推导步骤为:
[0086]
1)非线性弹簧在注射过程中受到的力fe与变形量x之间的关系为:
[0087]
fe=kex εkex3ꢀꢀꢀꢀꢀ
(1)
[0088]
其中ke是非线性弹簧的刚度,ε是非线性系数。
[0089]
2)麦克斯韦单元在注射过程中的弹簧力f1与弹簧变形x1之间的关系为:
[0090]
f1=kx1ꢀꢀꢀꢀꢀ
(2)
[0091]
其中k是麦克斯韦单元的弹簧刚度。
[0092]
3)麦克斯韦单元在注射过程中的阻尼力f1与阻尼变形x2之间的关系:
[0093]
f1=ηv=η(dx2/dt)
ꢀꢀꢀꢀ
(3)
[0094]
其中η是麦克斯韦单元的阻尼常数,v是注射速度,t是注射时间。
[0095]
4)整个系统的变形x:
[0096]
x=x1 x2ꢀꢀꢀꢀ
(4)
[0097]
5)从上面的表达式可以得到麦克斯韦单元的表达式,并对其进行拉普拉斯变换如下:
[0098][0099][0100]
6)由于x(t)=vt,v是常数,拉普拉斯变换x(s)=v/s2,所以拉普拉斯变换后的公式(6)可以表示为:
[0101]
f1=η(1-e-(k/η)t
)v
ꢀꢀꢀꢀꢀ
(7)
[0102]
7)注射力f为非线性弹簧受到的力fe与麦克斯韦单元受到的力f1之和,注射速度v在整个显微注射的过程中是不变的,则注射力f与注射速度v、变形量x之间的关系为:
[0103]
f=fe f1=kex εkex3 η(1-e-(k/η)t
)v
ꢀꢀꢀꢀ
(8)
[0104]
步骤2中,实验使用的斑马鱼胚胎半径在500μm左右,微力传感探针(ft-sgh03)的钨针尖半径在0.1μm~2μm之间,注射针半径为25μm。一共进行了11种速度的显微注射实验,11种速度分别为100μm/s、200μm/s、300μm/s、400μm/s、500μm/s、600μm/s、700μm/s、800μm/s、900μm/s、1000μm/s、1700μm/s,每种速度下在不同胚胎上重复注射10次,记录注射力和细胞变形后取它们的平均值。
[0105]
步骤3中,蚁狮算法运行的具体步骤为:
[0106]
1)随机产生蚂蚁的位置,并进行随机游走,随机游走的过程表达式为:
[0107]
x(t)=[0,cumsum(2r(t1)-1),cumsum(2r(t2)-1),...,cumsum(2r(tn)-1)]
ꢀꢀꢀ
(9)
[0108]
该公式中:cumsum为累积函数,n是最大迭代次数,t为当前
迭代次数,rand是[0,1]上的随机数。
[0109]
2)将蚂蚁的位置限制在一定搜索空间中,需要对其进行归一化处理:
[0110][0111]
该公式中:ai和bi分别表示第i只蚂蚁所在的最小位置和最大位置,和分别表示在第t次迭代中第i只蚂蚁所在的最小位置和最大位置。
[0112]
3)蚂蚁行走会受到蚁狮陷阱的影响步入陷阱,表达式为:
[0113][0114]
该公式中:代表第j只蚁狮在第t次迭代中的位置。
[0115]
4)在蚂蚁落入了蚁狮的陷阱后,它行走的半径将会缩小,模型表达式为:
[0116][0117]
该公式中:i是一种自适应迭代因子,它的公式如下:
[0118][0119]
5)在蚁狮捕猎成功后,可以认为蚂蚁所在位置更适合捕食,蚁狮将更新到蚂蚁的位置,表达式为:
[0120][0121]
该公式中:f(
·
)为适应度函数。
[0122]
6)每次迭代中适应度最高的蚁狮为精英蚁狮,蚂蚁的随机游走受到轮盘赌选择的蚁狮和精英蚁狮共同影响,蚂蚁的位置为:
[0123][0124]
该公式中:为第t次迭代中第i只蚂蚁的位置,表示蚂蚁受到的轮盘赌选择的蚁狮的影响,表示蚂蚁受到的精英蚁狮的影响。
[0125]
步骤3中,对蚁狮算法中的适应度函数进行修改。新的适应度函数loss包括两部分:一部分为全部数据的均方误差loss1,表示对全部数据的匹配程度;另一部分为穿破胚胎细胞那一时刻数据的均方误差loss2,表示穿破时刻数据的匹配程度。新的适应度函数表示为:
[0126][0127]
其中i为全部数据的个数,j为穿破胚胎细胞那一刻数据的个数。新的适应度函数越小,模型对注射过程的拟合程度就越高,适应度就越高。那么,式(14)转变成:
[0128]
[0129]
该公式中:f(
·
)=loss。
[0130]
步骤3中,所有的蚂蚁和蚁狮都处在4维空间中,4个维度对应非线性粘弹性模型的4个需要求解的模型参数ke、ε、η、k。利用改进的蚁狮算法完成对非线性粘弹性模型的4个模型参数ke、ε、η、k的求解,具体步骤为:
[0131]
1)数据初始化。设定各个模型参数的范围为0到10,最大迭代次数为600。在4维空间随机产生50组模型参数作为蚂蚁的50个位置,存入矩阵m
ant,
随机产生50组模型参数作为蚁狮的50个位置,存入矩阵m
antion
,蚂蚁和蚁狮的位置矩阵如下:
[0132][0133][0134]
其中i∈[1,50],j∈[51,100]。
[0135]
2)设置适应度函数为改进后的适应度函数loss,然后计算蚁狮的位置矩阵中每组模型参数的适应度函数值,将蚁狮的位置矩阵中适应度最高的一组模型参数作为目前的最优解b
best
,即精英蚁狮。
[0136]
3)蚂蚁的位置矩阵m
ant
中的每一组模型参数ai,通过轮盘赌的方式选择蚁狮位置矩阵中的一组模型参数bj后,围绕着bj和b
best
根据式(11)随机游走,并根据式(15)完成模型参数ai的更新。
[0137]
4)比较步骤3)中的ai和bj两组模型参数的适应度函数值,根据式(17),更新模型参数bj后,计算出本次迭代蚁狮位置矩阵中适应度最高的一组模型参数作为目前新的最优解b
best
,即新的精英蚁狮。
[0138]
5)判断是否达到最大迭代次数。如果已经达到最大迭代次数,则输出最后一次迭代中适应度最高的一组模型参数(精英蚁狮位置)作为最优解b
best
,即为模型的4个参数的最优解;如果还未达到最大迭代次数,则重复进行步骤3和步骤4。
[0139]
根据步骤2得到的实验数据,经过步骤1、3,即可求解出力学模型中ke、ε、η、k,从而建立起显微注射过程中注射力f与注射速度v、变形量x之间的关系,完成力学模型的搭建。
[0140]
图2显示了本发明所建立的非线性粘弹性力学模型与线性粘弹性力学模型的均方根误差、决定系数、以及前面定义的loss的对比结果。
[0141]
根据图2的结果对比,本发明实施的非线性粘弹性力学模型的均方根误差、决定系数和loss远低于线性粘弹性模型。
[0142]
图3显示了本发明所建立的使用改进蚁狮算法求解的非线性粘弹性力学模型与使用传统的最小二乘法求解出来的非线性粘弹性力学模型的均方根误差、决定系数、以及前面定义的loss的对比结果。
[0143]
根据图3的结果对比,本发明所建立的使用改进蚁狮算法求解的均方根误差、决定系数和loss远低于使用传统的最小二乘法求解出来的非线性粘弹性力学模型。
[0144]
本发明提出了一种基于蚁狮算法求解的斑马鱼胚胎细胞非线性粘弹性力学模型。目前,针对于线性粘弹性力学模型无法准确描述显微注射过程中斑马鱼胚胎细胞的力学行为的问题,采用非线性粘弹性模型显著提高了模型的准确度。此外,使用蚁狮算法求解模型参数进一步提高了模型的准确度。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。