1.本发明属于管道振动响应分析领域,具体涉及一种白噪声激励下海底管道振动响应的近似解析方法。
背景技术:
2.海底管道是海洋油气开采系统的重要组成部分。海底管道在海洋环境下工作时,受到海底地震的冲击和波流的冲刷等随机激励是不可避免的,这些随机激励是导致海底管道失效的主要原因。管道破裂会造成严重的经济损失,海洋环境会受到不可估量污染,水下修复非常困难和昂贵。为了减少随机激励对海底管道的危害,了解管道随机振动动态特性,实验可以得到较为精确的数据,但实验成本高,实验周期长。为提升效率、节省成本,建立海底管道的数学模型,用近似解析的方法进行分析已经成为海底管道研究中一种重要的手段。
3.高斯白噪声是最为常见的随机激励之一,因其具有在不同时刻互不相关,统计独立的特点,高斯白噪声在随机振动领域已经成为重点的研究对象。白噪声作用在运动的系统上,系统的响应属于扩散的markov过程。当前对于解决多自由度系统在白噪声激励下的响应概率问题,主要是路径积分法、有限元法、等效线性化法、有限差分法、随机平均法以及广义胞映射法。其中,随机平均法是求解低自由度系统一种简单有效的方法。该方法通过对关于时间的快变量进行确定性平均,fpk方程能得到极大的简化,减小了求解fpk方程的困难,扩大了fpk方程方法可求解问题的范围。
4.传统的随机平均法主要包括幅值包线随机平均法和强非线性随机平均法。当系统存在时间快变量和慢变量时,幅值包线随机平均法对时间确定性平均可以降低系统的维度。然而幅值包线随机平均法只能求解线性恢复力的系统,不适用于恢复力是非线性的系统。强非线性随机平均法结合了广义谐和函数,解决了幅值包线随机不能求解非线性恢复力系统的问题。然而,强非线性随机平均法在计算过程中会出现公式复杂,计算量大,耗费大量时间的问题。简而言之,目前采用随机平均法计算海底管道系统的概率响应存在着计算成本高,效率低等问题,这些问题限制了对随机激励下海底管道动态响应的分析。
技术实现要素:
5.本发明的目的是针对上述随机激励下海底管道振动响应存在的问题,提供一种白噪声激励下海底管道振动响应分析的近似解析方法。用改进的随机平均法得到海底管道系统的振幅、位移和速度概率密度函数,极大地简化了海底管道随机响应的计算过程,可为海底管道在随机激励下的分析提供有力的支持。
6.为达到上述目的,本发明采用如下技术方案:
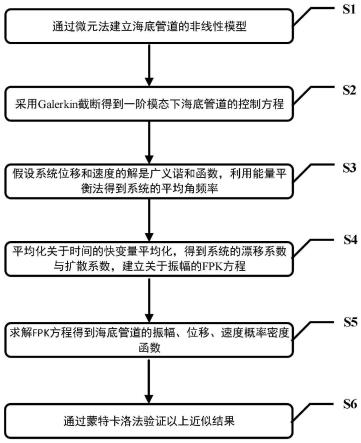
7.一种白噪声激励下海底管道振动响应分析的近似解析方法,包括以下步骤:
8.步骤s1,通过微元法建立海底管道的非线性动力学模型;
9.步骤s2,采用galerkin截断得到一阶模态下的海底管道控制方程;
10.步骤s3,假设系统响应的解是广义谐和函数,利用能量平衡法得到系统的平均角频率;
11.步骤s4,平均化关于时间的快变量,得到系统的漂移系数与扩散系数,建立关于振幅的fpk方程;
12.步骤s5,求解fpk方程得到海底管道的振幅、位移、速度概率密度函数;
13.步骤s6,通过蒙特卡洛法验证以上近似解析结果。
14.具体地,步骤s1中,考虑弯曲变形引起的轴向力的非线性,常见的输液管道非线性动力学模型如下:
[0015][0016]
其中,m为单位长度管道内流体质量,m为单位长度管道质量,l为输液管两端支撑间的距离,e为管道弹性模量,i为管道惯性矩,w为管道横向位移,f(t)为外部随机激励,c为阻尼系数,u为流速,p为管道内部的轴向张力,t为时间,x为管道上距原点处的距离;a为管道截面积。
[0017]
具体地,步骤s2中,将海底管道的横向位移离散化。分离出关于时间与空间的函数,根据海底管道的边界条件求出相应的模态函数,以模态函数作为试函数,通过galerkin截断得到一阶模态下海底管道的控制方程。至此可以将海底管道动力学方程从偏微分方程转换为常微分方程,方便后续的对系统动态响应的求解。
[0018]
具体地,步骤s3中,采用广义谐和函数法假设管道系统位移的解为简谐形式,假设位移解的形式为
[0019]
x(t)=acosθ(t),
[0020]
其中a为振幅,θ为相位,ω为瞬时角频率,为相位角。列出系统的势能与动能,进一步得到系统的hamilton总能量,用能量平衡法求出系统的平均角频率,用平均角频率ω
*
代替位移解中的瞬时角频率ω,t为时间。
[0021]
具体地,步骤s4中,将平均角频率带入到假设的位移解中,再将假设的位移解带入到控制方程中,得到关于振幅a和相位的随机微分方程:
[0022][0023][0024]
其中m1,m2为漂移系数,b1,b2为扩散系数,ξ表示随机激励。对平均化之前的飘移系数与扩散系数关于角θ在(0,2π)上进行确定性平均,得到平均化之后的漂移系数m(a)与扩散系数σ2(a):
[0025][0026][0027]
其中,r
ij
表示是自相关函数,i表示t时刻,j表示t τ时刻;τ表示时间间隔,《
·
》表
示平均化算子
[0028]
白噪声激励下的系统是一个markov扩散过程,fpk方程应用于白噪声激励下的系统,在已知漂移系数和扩散系数的情况下可以建立起相应的fpk方程:
[0029][0030]
其中,p为概率密度函数。
[0031]
具体地,步骤s5中,markov扩散过程属于一维扩散过程时,fpk方程存在精确的解析解。fpk方程在边界条件a=0和a=∞下,概率密度函数p(a,t)=0,振幅的概率密度函数为:
[0032][0033]
其中,n为归一化系数。通过振幅-能量-位移速度之间的关系,得到位移与速度的联合概率密度函数:
[0034][0035]
其中,其中,表示系统的hamilton总能量。g(x)表示系统中仅关于位移x的项。
[0036]
具体地,步骤s6中,用蒙特卡洛方法对系统进行模拟。系统的随机激励为高斯白噪声,在matlab中可以randn函数模拟高斯分布的白噪声。选取足够并且合适的样本数量,结合runge-kutta法,得到白噪声激励下海底管道的振幅、位移与速度概率密度函数。
[0037]
本发明公开提供一种白噪声激励下海底管道振动响应分析的近似解析方法,采用近似解析的方法分析海底管道在随机激励下的概率响应;建立数学模型,使用能量平衡法改进的随机平均法,得到了系统的振幅、位移和速度的概率密度函数;通过蒙特卡洛模拟,对比了近似解析解与数值解,观测了该方法的误差,保证了方法的正确性和精确性。
[0038]
本发明与现有技术相比,具有如下有益效果:
[0039]
本发明采用结合了能量平衡法改进的随机平均法计算海底管道的随机响应,与数值解结果对比表明该方法有着很高的精度;改进了传统的随机平均法计算效率低、成本高、时间长的问题;可以应用于强非线性海底管道的情况,具有较强的适用性。
附图说明
[0040]
此处的附图被并入说明书中并构成本说明书的一部分,显示出了符合本发明的实施例,并与说明书一起用于解释本发明的原理。此处附图仅仅是本发明的一些实施例中的过程,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0041]
图1为白噪声激励下海底管道振动响应分析的近似解析方法的流程图。
[0042]
图2为示例的两端简支海底管道系统。
[0043]
图3为振幅概率密度函数理论解与数值解对比图。
[0044]
图4为位移概率密度函数理论解与数值解对比图。
[0045]
图5为速度概率密度函数理论解与数值解对比图。
具体实施方式
[0046]
以下所述,是以层层推进的方式对本发明进行详细说明。下面将结合本发明中的附图,对实施例中的具体实施方式进行清楚、完整的描述。本说明书中所述实施例能够以多种形式实施,且不应被理解为限于在此阐述的范例。
[0047]
用语“一个”、“—”、“所述”用以表示存在一个或多个要素/组成部分/等;用语“包括”和“具有”用以表示开放式的包括在内的意思并且是指除了列出的要素/组成部分/等之外还可存在另外的要素/组成部分/等。
[0048]
如图1所示,本发明提供的一种白噪声激励下海底管道振动响应分析的近似解析方法,包括以下步骤:
[0049]
步骤1:以一两端简支的海底管道为例,图2所示为两端简支的海底管道模型示意图。本发明基于euler-bernoulli梁模型建立海底管道模型,忽略剪切变形和转动惯量的影响。考虑弯曲变形引起的轴向力的非线性,使用微元法建模得到的海底管道非线性动力学模型如下:
[0050][0051]
其中,m为单位长度管道内流体质量,m为单位长度管道质量,l为输液管两端支撑间的距离,e为管道弹性模量,i为管道惯性矩,w为管道横向位移,f(t)为外部随机激励,c为阻尼系数,u为流速,p为管道内部的轴向张力,t为时间,x为管道上距原点处的距离;a为管道截面积。
[0052]
步骤2,将海底管道横向位移的解离散为关于时间和空间的两个函数。根据的两端简支梁模型的边界条件,两端简支梁的模态函数为sin(nπx/l)。取一阶模态下的试函数sin(πx/l),通过galerkin截断得到一阶模态下海底管道的控制方程为:
[0053][0054]
其中η=c/(m m),α=eiπ4/l4(m m)-mu2π2/l2(m m) pπ2/l2(m m),β=eaπ4/4l4(m m),w(t)为高斯白噪声,强度为2d,高斯分布下的白噪声的自相关函数r
ij
为2dδ(t)。
[0055]
步骤3,根据广义谐和函数法假设管道系统位移的解为简谐形式,假设解的形式为:
[0056]
x(t)=acosθ(t),
[0057]
其中a为振幅,θ为相位,ω为瞬时角频率,为相位角。列出海底管道系统的势能与动能,两者之和求出hamilton总能量h,残余项r可以由hamilton总能量h在θ=0和θ=4/π时相减得到。由galerkin-petrov法可以建立关于残余项的等式,求解该等式可以求出系统的平均角频率ω
*
。t为时间。
[0058]
步骤4,利用上述得到的平均角频率代替瞬时角频率,再将假设的位移解带入到控制方程中,得到振幅a和相位随机微分方程,ξ为随机激励;
[0059][0060][0061]
对平均化之前的飘移系数与扩散系数关于角θ在(0,2π)上进行确定性平均,得到平均化之后的漂移系数m(a)与扩散系数σ2(a):
[0062][0063][0064]
进而可以建立起相应的fpk方程:
[0065][0066]
步骤5,fpk方程在边界条件a=0和a=∞下,概率密度函数p(a,t)=0,fpk方程存在精确的解析解,振幅的概率密度函数为:
[0067][0068]
其中,n为归一化系数。通过振幅-能量-位移速度之间的关系,得到位移与速度的联合概率密度函数:
[0069][0070]
其中,
[0071]
步骤6,为验证本发明所述方法的正确性,使用蒙特卡洛方法对系统进行模拟。系统的随机激励为高斯白噪声,选取10000个高斯白噪声的样本数量,每个样本中含有4000个噪声点,结合runge-kutta法,得到白噪声激励下海底管道的振幅、位移与速度概率密度函数。
[0072]
本发明选取的海底管道的参数,弹性模量e为207gpa,管道外径为0.44m,管道内径为0.4m,管道长度l为25m,管道密度为7850kg/m3,油密度为800kg/m3,流速u取1m/s,轴向张力p为5n,阻尼系数η取1,高斯白噪声激励强度d为0.1。
[0073]
图3为海底管道的振幅概率密度函数,图4为海底管道的位移概率密度函数,图5为海底管道的速度概率密度函数。图中空心圆表示蒙特卡洛结果,实线表示改进的随机平均结果。峰值处误差数据如表1所示。
[0074]
表1 海底管道概率响应峰值处误差分析
[0075][0076]
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本公开的其他实施例。本技术旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由权利要求指出。
[0077]
应当理解的是,本公开并不局限于上面已经描述的实施例,并且可以在不脱离其范围进行各种修改和改变。本公开的范围仅由所附的权利要求来限。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。