1.本发明涉及农业自动化机械故障诊断技术领域,具体是基于群分解和改进多尺度权重散布熵的齿轮箱故障诊断方法。
背景技术:
2.随之人工智能及物联网的发展,智能诊断机械故障愈发的普及,农业机械作为一种重要的生产机械,其智能化受到越来越多的关注;实现农机智能化,一方面需要依靠数量众多的高精度传感器精确感知机械的状态,从而为后续处理策略奠定基础;另一方面需要对获得的数据进行加工处理找出内在关联关系,实现对机械的差异化处理;玉米穗茎兼收收获机行走系统齿轮箱经常运行在多尘多振动的环境下,齿轮箱健康状态对于整车的可靠性至关重要;齿轮箱内齿轮传动系统的故障多为渐进式故障,当缺陷到一定程度致使部件丧失功能导致车辆长时间停机,造成经济损失或安全事故,对于农业生成影响较大;
3.识别齿轮传动系统故障的类型并有针对性的处理是避免重大故障的有效手段,现阶段较常用的方法是获取传动系统的振动数据,提取出故障组件造成的冲击成分进而识别故障;但是实际工作中,获取的故障振动信号会受到传递路径的衰减与路径之间相互耦合作用的影响,并伴有强烈的背景噪音,同时信号本身也具有明显的非线性与非平稳性的特点;在这种前提下,很难直观地从信号中识别出故障;
4.因此亟需设计一种基于群分解和改进多尺度权重散布熵的齿轮箱故障诊断方法用于解决上述技术问题。
技术实现要素:
5.本发明主要是针对玉米穗茎兼收收获机行走系统齿轮箱齿轮传动系统,由信号采集系统、故障诊断系统两部分组成;信号采集系统主要用于采集齿轮箱振动信号,基于stm32开发板进行开发,由flash存储芯片、can发送模块、加速度传感器、ad转化芯片共同组成;故障诊断系统诊断齿轮箱是否故障及故障类型,对收集到的齿轮箱振动数据,使用经优化蝙蝠算法确定参数的群智能分解算法分解出有用信号成分,利用改进改进多尺度权重散布熵算法进行信号的特征提取,提取特征通过优化蝙蝠算法确定参数的svm分类器确定故障类型,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:
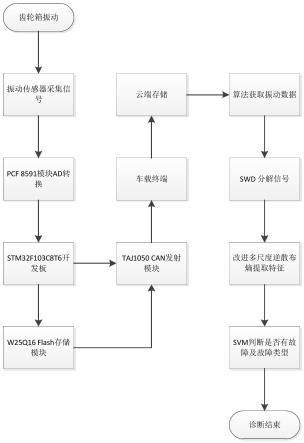
7.一种基于群分解和改进多尺度权重散布熵的齿轮箱故障诊断系统,所述的信号采集系统,采样频率为5000hz,adc位数为16位,采样时长2s,采样间隔15分钟,通信方式为低速can总线;
8.所述的信号采集系统,基于stm32开发板进行开发,开发板选用stm32f103c8t6;振动传感器yk-yd20采集齿轮箱振动信号,由pcf8591芯片为核心的ad转化模块转换为数字信号,转换后的数据经过单片机存储到w25q16 flash存储芯片;在采样间隔利用taj1050can发送模块将数据发送至车载终端,由车载终端发送到云端存储;
9.一种基于群分解和改进多尺度权重散布熵的齿轮箱故障诊断方法,所述的优化蝙蝠算法的方法是:在标准蝙蝠算法个体进行局部搜索的公式中,引入自适应速度权重因子ωi,提高全局寻优速度。
[0010][0011]
公式中,rand(
·
)为产生(0,1)随机数;xi为当前位置;x
mean
为全局位置的均值;
[0012]
计算ωi后,更新蝙蝠算法的速度公式:
[0013][0014]
公式中,为t 1时刻蝙蝠速度;为t时刻蝙蝠速度;为t时刻蝙蝠位置;x*为全局最优位置;fi为当前脉冲发射频率。
[0015]
作为本发明进一步的方案:所述群智能分解信号的方法是:输入振动信号,确定关键参数中心频率功率密度谱阈值和迭代误差,之后进行信号分解。
[0016]
作为本发明再进一步的方案:所述swd蝙蝠算法的适度函数为:采用分解后的oc分量的包络谱峭度均值的倒数作为适应度函数评估分解效果。
[0017]
作为本发明再进一步的方案:所述的改进多尺度权重散布熵特征提取方法是:在多尺度散布熵的基础上,对于输入时间序列x,粗粒化时选取最大值作为粗粒化的值,以便提取时间序列中微弱的冲击成分更好的表述信号的特征,公式为:
[0018][0019]
式中:代表最大尺度因子为τ,m为嵌入维度,d为时延,当前尺度因子为s时的粗粒化序列,x为原始输入离散时间序列;为原始序列中从x
(i-1
)s τ到x
is τ-1区间的最大值;n为信号长度。
[0020]
粗粒化后压缩维度的概率计算时,增加考虑重构向量集中度的评估权重参数ωi,更近一步突出时间序列中冲击成分,计算公式为:
[0021][0022]
式中:为第i个相空间重构向量所对应的排列样式;为第j个相空间重构向量所对应的排列样式;count(
·
)函数表示统计从到所有潜在的排列样式中与当前排列样式相同的数量;ωi为第i个相空间重构向量的权重;zi为第i个相空间重构向量;为第i个相空间重构向量均值;为第i个相空间重构向量的第j个值;
[0023]
最后计算改进多尺度权重散布熵e(x,m,d,c)为:
[0024][0025]
式中:x为原始输入离散时间序列;m为嵌入维度;d为时延;c为序列重构时分类数。
[0026]
作为本发明再进一步的方案:所述的训练svm分类器识别不同类别故障的方法是:使用libsvm模型;输入特性向量,确定支持向量机类型、核函数类型、停止训练的误差精度、每个类所占据的权重、惩罚系数、核函数系数,之后进行故障识别。
[0027]
作为本发明再进一步的方案:所述svm蝙蝠算法的适度函数为:采用5折交叉验证的准确率作为适度函数评估分类准确率。
[0028]
作为本发明再进一步的方案:所述的svm分类器可以识别类型有:正常齿轮、正常轴承、正常轴承滚动体、齿轮偏心、齿轮磨损、齿轮裂纹、齿轮断半齿、齿轮断齿、轴承外圈点蚀、轴承内圈点蚀、轴承滚动体点蚀。
[0029]
与现有技术相比,本发明的有益效果是:
[0030]
群智能分解(swd)算法的在处理强噪声、非线性与非平稳性信号方面的自适应性与分解效果相对较好,通过swd算法,可以快速、准确地从含有强噪声、非线性与非平稳性的原始信号中提取有用信号成分为后续故障识别奠定基础;
[0031]
svm分类器作为识别故障类型的分类器,对非线性的问题具有很好的识别和泛化能力;
[0032]
swd算法有两个重要的参数中心频率功率密度谱阈值和迭代误差,分别决定着信号分解的数量和每个分量的准确率;svm也有两个重要的参数惩罚系数和核函数的系数,不同的参数组合影响svm分类器的准确率;为了快速找出swd和svm参数最优组合提高算法整体运行效率,使用优化蝙蝠算法进行参数搜索,相比原蝙蝠算法,优化蝙蝠算法对于全局寻优速度更快更准确;
[0033]
熵理论作为评估时间序列规则程度与复杂程度的一种非线性动力学指标,非常适用于表征具有非平稳性的齿轮箱振动加速度信号;散布熵计算速度快,稳定性高,并且抗噪能力有大幅提升,而且振动信号微小的变化不会改变其映射后的类别标签,但是仅考虑了幅值的绝对性而没有考虑相对性,无法对信号的波动性进行评估;本发明提出的改进多尺度权重散布熵,计算速度快,受突变信号影响较小,且考虑了幅值之间的大小关系在对信号的特征提取上面作用明显,并且具有较强的鲁棒性。
[0034]
本发明综合利用群分解和改进多尺度权重散布熵的优点对玉米穗茎兼收收获机行走系统齿轮箱进行故障诊断,可以较为快速、准确地从强噪声背景下提取信号中有用冲击特征用于故障的识别,方法效率高,易于实施,鲁棒性好;
[0035]
同时具有强烈背景噪音的齿轮箱振动信号经过本方法的处理,可以较为准确的提取信号中的有用特征,保留有用冲击成分,重构信号失真度低;通过优化蝙蝠算法提高了算法整体的运行效率;通过本发明可以快速、准确地检测齿轮箱是否发生故障及故障类型,进而及时处理,避免因齿轮箱故障引起更大的经济损失甚至安全事故。
附图说明
[0036]
图1为基于群分解和改进多尺度权重散布熵的齿轮箱故障诊断方法的整体流程
图。
[0037]
图2为基于群分解和改进多尺度权重散布熵的齿轮箱故障诊断方法采集到的振动信号图。
[0038]
图3为基于群分解和改进多尺度权重散布熵的齿轮箱故障诊断方法中振动信号的oc1分量图。
[0039]
图4为基于群分解和改进多尺度权重散布熵的齿轮箱故障诊断方法中振动信号的oc2分量图。
具体实施方式
[0040]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0041]
请参阅图1~4,本发明实施例中,一种基于群分解和改进多尺度权重散布熵的齿轮箱故障诊断系统,包括信号采集系统和故障诊断系统;
[0042]
所述信号采集系统采集齿轮箱振动数据,基于stm32开发板进行开发,由flash存储芯片、can发送模块、加速度传感器、ad转化芯片共同组成;
[0043]
所述故障诊断系统诊断齿轮箱故障类型,对收集到的齿轮箱振动数据,使用经优化蝙蝠算法确定参数的群智能分解(swd)算法分解出有用信号成分;
[0044]
利用改进多尺度权重散布熵算法进行信号的特征提取;提取特征通过优化蝙蝠算法确定参数svm分类器确定故障类型;
[0045]
所述的信号采集系统,采样频率为5000hz,adc位数为16位,采样时长2s,采样间隔15分钟,通信方式为低速can总线;基于stm32开发板进行开发,开发板选用stm32f103c8t6;振动传感器yk-yd20采集齿轮箱振动信号,由pcf8591芯片为核心的ad转化模块转换为数字信号,转换后的数据经过单片机存储到w25q16 flash存储芯片;在采样间隔利用taj1050can发送模块将数据发送至车载终端,由车载终端发送到云端存储;
[0046]
所述的优化蝙蝠算法的方法是,在标准蝙蝠算法个体进行局部搜索的公式中,引入自
[0047]
适应速度权重因子ωi,提高全局寻优速度;
[0048][0049]
公式中,rand(
·
)为产生(0,1)随机数;xi为当前位置;x
mean
为全局位置的均值;
[0050]
所述swd蝙蝠算法的适度函数为:采用分解后的oc分量的包络谱峭度均值的倒数作为适应度函数评估分解效果;
[0051]
所述的改进多尺度权重散布熵特征提取方法是:
[0052]
步骤1)在多尺度散布熵的基础上,对于输入时间序列x,粗粒化时选取最大值作为粗粒化的值,以便提取时间序列中微弱的冲击成分更好的表述信号的特征,公式为:
[0053][0054]
式中:代表最大尺度因子为τ,m为嵌入维度,d为时延,当前尺度因子为s时的粗粒化序列,x为原始输入离散时间序列;为原始序列中从x
(i-1)s τ
到x
is τ-1
区间的最大值;n为信号长度。
[0055]
步骤2)粗粒化后压缩维度的概率计算时,增加考虑重构向量集中度的评估权重参数ωi,更近一步突出时间序列中冲击成分,计算公式为:
[0056][0057]
式中:为第i个相空间重构向量所对应的排列样式;为第j个相空间重构向量所对应的排列样式;count(
·
)函数表示统计从到所有潜在的排列样式中与当前排列样式相同的数量;ωi为第i个相空间重构向量的权重;zi为第i个相空间重构向量;为第i个相空间重构向量均值;为第i个相空间重构向量的第j个值;
[0058]
步骤3)最后计算改进多尺度权重散布熵e(x,m,d,c)为:
[0059][0060]
式中:x为原始输入离散时间序列;m为嵌入维度;d为时延;c为序列重构时分类数;
[0061]
利用优化蝙蝠算法确定swd的参数设置是:种群数量为60、变量维度为2、最大迭代次数150、参数中心频率功率密度谱阈值搜索范围(0.01,1)、参数迭代误差搜索范围(0.01,2)。
[0062]
经过优化蝙蝠算法计算,swd的中心频率功率密度谱阈值和迭代误差的最优参数为(0.19,0.16);使用最优参数对振动信号分解的2个oc分量如图3所示。
[0063]
对2个oc分量计算改进多尺度权重散布熵如下表所示:
[0064][0065]
将所提出的特征值合并,组成特征向量,则每一条信号样本对应的特征向量长度为40。
[0066]
利用优化蝙蝠算法确定svm的参数设置是:种群数量为50、变量维度为2、最大迭代次数150、参数c搜索范围(0.01,100)、参参数g搜索范围(1,100);svm其它参数设置为类型选用c-支持向量分类机;核函数选用rbf径向基核函数;停止训练的误差精度为0.001;每个类所占据的权重为1。
[0067]
经过优化蝙蝠算法计算,svm的最优参数为(9.13,17.09);
[0068]
将特征向量输入svm分类器进行分类振动故障类型为轴承内圈点蚀。
[0069]
尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
[0070]
本发明原交底技术方案
[0071]
本发明主要是针对玉米穗茎兼收收获机行走系统齿轮箱齿轮传动系统,由信号采集、故障诊断两部分组成;信号采集系统主要用于采集齿轮箱振动信号,基于stm32开发板进行开发,由flash存储芯片、can发送模块、加速度传感器、ad转化芯片共同组成;故障诊断系统诊断齿轮箱是否故障及故障类型,对收集到的齿轮箱振动数据,使用经优化蝙蝠算法确定参数的群智能分解算法分解出有用信号成分,利用改进改进多尺度权重散布熵算法进行信号的特征提取,提取特征通过优化蝙蝠算法确定参数的svm分类器确定故障类型。
[0072]
所述的信号采集系统,采样频率为5000hz,adc位数为16位,采样时长2s,采样间隔15分钟,通信方式为低速can总线。
[0073]
所述的信号采集系统,基于stm32开发板进行开发,开发板选用stm32f103c8t6;振动传感器yk-yd20采集齿轮箱振动信号,由pcf8591芯片为核心的ad转化模块转换为数字信号,转换后的数据经过单片机存储到w25q16 flash存储芯片;在采样间隔利用taj1050can发送模块将数据发送至车载终端,由车载终端发送到云端存储。
[0074]
所述的优化蝙蝠算法的方法是:在标准蝙蝠算法个体进行局部搜索的公式中,引入自适应速度权重因子ωi,提高全局寻优速度。
[0075][0076]
公式中,rand(
·
)为产生(0,1)随机数;xi为当前位置;x
mean
为全局位置的均值;
[0077]
计算ωi后,更新蝙蝠算法的速度公式:
[0078][0079]
公式中,为t 1时刻蝙蝠速度;为t时刻蝙蝠速度;为t时刻蝙蝠位置;x*为全局最优位置;fi为当前脉冲发射频率。
[0080]
所述群智能分解信号的方法是:输入振动信号,确定关键参数中心频率功率密度谱阈值和迭代误差,之后进行信号分解。
[0081]
swd蝙蝠算法的适度函数为:采用分解后的oc分量的包络谱峭度均值的倒数作为适应度函数评估分解效果。
[0082]
所述的改进多尺度权重散布熵特征提取方法是:在多尺度散布熵的基础上,对于
输入时间序列x,粗粒化时选取最大值作为粗粒化的值,以便提取时间序列中微弱的冲击成分更好的表述信号的特征,公式为:
[0083][0084]
式中:代表最大尺度因子为τ,m为嵌入维度,d为时延,当前尺度因子为s时的粗粒化序列,x为原始输入离散时间序列;为原始序列中从x
(i-1)s τ
到x
is τ-1
区间的最大值;n为信号长度。
[0085]
粗粒化后压缩维度的概率计算时,增加考虑重构向量集中度的评估权重参数ωi,更近一步突出时间序列中冲击成分,计算公式为:
[0086][0087]
式中:为第i个相空间重构向量所对应的排列样式;为第j个相空间重构向量所对应的排列样式;count(
·
)函数表示统计从到所有潜在的排列样式中与当前排列样式相同的数量;ωi为第i个相空间重构向量的权重;zi为第i个相空间重构向量;为第i个相空间重构向量均值;为第i个相空间重构向量的第j个值;
[0088]
最后计算改进多尺度权重散布熵e(x,m,d,c)为:
[0089][0090]
式中:x为原始输入离散时间序列;m为嵌入维度;d为时延;c为序列重构时分类数。
[0091]
所述的训练svm分类器识别不同类别故障的方法是:使用libsvm模型;输入特性向量,确定支持向量机类型、核函数类型、停止训练的误差精度、每个类所占据的权重、惩罚系数、核函数系数,之后进行故障识别。
[0092]
svm蝙蝠算法的适度函数为:采用5折交叉验证的准确率作为适度函数评估分类准确率。
[0093]
所述的svm分类器可以识别类型有:正常齿轮、正常轴承、正常轴承滚动体、齿轮偏心、齿轮磨损、齿轮裂纹、齿轮断半齿、齿轮断齿、轴承外圈点蚀、轴承内圈点蚀、轴承滚动体点蚀。
[0094]
本发明提出的一种基于群分解和改进多尺度权重散布熵的齿轮箱故障诊断方法,其有益效果是:具有强烈背景噪音的齿轮箱振动信号经过本方法的处理,可以较为准确的提取信号中的有用特征,保留有用冲击成分,重构信号失真度低;通过优化蝙蝠算法提高了算法整体的运行效率;通过本发明可以快速、准确地检测齿轮箱是否发生故障及故障类型,进而及时处理,避免因齿轮箱故障引起更大的经济损失甚至安全事故。
[0095]
利用优化蝙蝠算法确定swd的参数设置是:种群数量为60、变量维度为2、最大迭代
次数150、参数中心频率功率密度谱阈值搜索范围(0.01,1)、参数迭代误差搜索范围(0.01,2)。
[0096]
经过优化蝙蝠算法计算,swd的中心频率功率密度谱阈值和迭代误差的最优参数为(0.19,0.16);使用最优参数对振动信号分解的2个oc分量如图3所示。
[0097]
对2个oc分量计算改进多尺度权重散布熵如下表所示:
[0098]
尺度因子12345678oc10.000730.000470.000820.001280.001750.001980.002100.00249oc20.016190.011280.011230.008180.015990.029620.037790.03918
[0099]
尺度因子910111213141516oc10.002780.002620.002790.003680.004710.005670.006040.00639oc20.034090.028760.024810.020680.018050.015420.013270.01178
[0100]
尺度因子17181920oc10.006600.006990.007050.00712oc20.010710.009280.008390.00750
[0101]
将所提出的特征值合并,组成特征向量,则每一条信号样本对应的特征向量长度为40。
[0102]
利用优化蝙蝠算法确定svm的参数设置是:种群数量为50、变量维度为2、最大迭代次数150、参数c搜索范围(0.01,100)、参参数g搜索范围(1,100);svm其它参数设置为类型选用c-支持向量分类机;核函数选用rbf径向基核函数;停止训练的误差精度为0.001;每个类所占据的权重为1。
[0103]
经过优化蝙蝠算法计算,svm的最优参数为(9.13,17.09);
[0104]
将特征向量输入svm分类器进行分类振动故障类型为轴承内圈点蚀。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。