1.本发明涉及的是一种声发射源定位方法,具体地说是核电站安全壳声发射源定位方法。
背景技术:
2.声发射是材料中因裂缝扩展、塑性变形或相变等引起应变能快速释放而产生的应力波现象。利用接收声发射信号研究材料、动态评价结构完整性的技术称为声发射监测技术。由于声发射技术的先进性,目前已在陆上和海上核电站进行推广应用,核电站在管道泄漏、容器监测、裂纹状态监测和损伤识别等领域逐步采用声发射监测技术。由于浮动式核电站安全壳容器中储存的介质为易燃、易爆、高温和放射性物质,一旦发生泄漏,后果将是灾难性的。因此,在结构损伤破坏的早期及时发现并对损伤位置进行定位,对保证结构的完整性、提高工作效率、降低生产风险、确定使用寿命和改进结构设计等方面具有非常重要的意义。
3.声发射信号频率通常可以达到几百khz,声发射信号的采集频率要求一般在1mhz以上。声发射结构损伤识别技术作为一种新型的动态无损监测技术,可以在不破坏结构状态、不影响正常作业的情况下实现结构损伤位置和损伤程度的实时动态监测,建立应变和结构健康状态之间的映射关系,进而实现对工程结构的健康监测。由于通过缺陷形成初期产生的声发射波可以定位缺陷的坐标,声发射源定位技术可以使维修人员在不停机作业的情况下进行小范围内的集中监测,迅速消除隐患,大幅度提高工作效率。
4.现有技术中的声发射源定位方法是在工程结构物表面布置传感器阵列,一般都是采用三角时差定位和区域定位相结合的方式对工程结构物进行实时监测。具体步骤为先放置传感器阵列,将结构物表面划分成一系列三角形网格,然后根据接收到的声发射信号确定出声发射源在哪一个三角形网格区域内,再根据这个三角形网格中传感器接收到的到达时间差求解非线性方程组来确定声源位置。
5.而上述定位方法的不便之处在于,需要提前知道材料的性质,并且随着结构物的体积增加,需要的传感器数量也要增加。以容积为200-1000m3的压力球罐为例,完成对其的声发射源定位就需要布置16-32个传感器。这就导致大型球形容器表面的声发射源定位成本很高,计算量和计算误差也较大,因而往往难以及时满足工程的需求。
技术实现要素:
6.本发明的目的在于提供快速有效地实现对结构损伤区域的定位,且对声速各向同性和各向异性材料均有效的一种浮动式核电站安全壳声发射源定位方法。
7.本发明的目的是这样实现的:
8.本发明一种浮动式核电站安全壳声发射源定位方法,其特征是:
9.(1)建立声发射源定位的“l”型传感器阵列;
10.(2)记录并且存储各传感器接收到的来自声源的声发射信号;
11.(3)分析声发射信号的波形图,得到到达不同传感器的时差;
12.(4)根据时差确定真伪声发射源的位置,即结构损伤位置;
13.(5)判断出真实声发射源的位置,即结构损伤的真实位置。
14.本发明还可以包括:
15.1、对于材料为声速各向同性的浮动式核电站安全壳球形容器,取三个传感器共同构成一个“l”型传感器阵列,并配合第四个传感器共同构成一个声发射源“z”型定位传感器阵列。
16.2、对于材料为声速各向异性的浮动式核电站安全壳球形容器,取六个传感器分别构成两组“l”型传感器阵列,共同构成声发射源定位传感器阵列。
17.3、对于材料为声速各向异性的浮动式核电站安全壳球形容器,通过两组“l”型传感器阵列分别确定声发射源所在的两个大圆,两个大圆在球面上的两个交点分别为真实声发射源和伪声发射源位置。
18.4、所述步骤(3)中,声源到任意两个传感器的传播时间差δt
ij
,其计算方法为:
19.δt
ij
=t
i-tj=(t
i-t0)-(t
j-t0)=t
i-tj=δt
ij
20.其中,t0为产生声发射波的准确时间,ti、tj为到达传感器的时刻,ti、tj为到达传感器的精准传播时间。
21.5、对于材料为声速各向同性的浮动式核电站安全壳球形容器,通过下列方式确定声源位置的纬度坐标θ
p
:
22.r*(π-θ
p
)-r*θ
p
=c*δt
24
23.其中,声源的球坐标为r为浮动式核电站球形壳体的半径,c为波速。
24.6、对于材料为声速各向同性的浮动式核电站安全壳球形容器,通过“l”型传感器阵列的时差,通过下列公式确定声发射源位置的经度坐标由在(0,2π)范围内得到的两个值确定真实声发射源和伪声发射源的坐标:
25.其中,声发射源的球坐标为
26.7、在步骤(5)中,“l”型传感器阵列的角平分线所在的大圆为等时线,通过等时线将球壳划分成两个半球,根据两个半球上的传感器接收到声发射波信号的先后即可判断出真实声发射源的位置。
27.8、当两个半球上的传感器接收到声波信号的时间不同时,先接收到声波信号的传感器所在半球上的声源为真实声发射源。
28.9、当两个半球上的传感器接收到声波信号的时间相同时,真实声源位于等时线所在大圆上,并通过比较三个传感器之间的时间差确定真实声发射源的位置。
29.本发明的优势在于:本发明不仅适用于声速各向同性球形容器,也能够很好地适用于声速各向异性的球形容器;仅需要4-6个声发射传感器,能够大大减少连续监测结构的成本;不需要任何迭代算法,有效地提高了定位精度和速度。本发明对声发射监测中的浮动式核电站安全壳球形容器表面声发射源定位问题提出了新的方法,通过及时发现损伤位置及潜在威胁从而保障结构的安全性,在船舶与海洋工程、土木工程、石油化工、深海潜水、道路桥梁、海上新能源等领域有着良好的应用前景。
附图说明
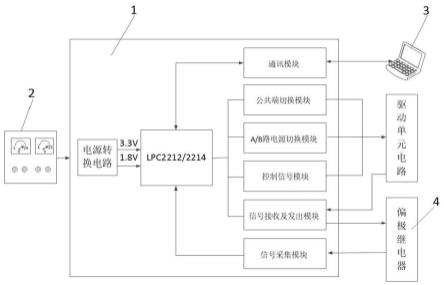
30.图1为本发明的总体布置图;
31.图2为“l”型传感器阵列的示意图;
32.图3为各向同性浮动式核电站安全壳球形容器表面的声源定位的结构示意图;
33.图4为为各向同性浮动式核电站安全壳球形容器表面上计算声源纬度的原理示意图;
34.图5为各向异性浮动式核电站安全壳球形容器表面的声源定位的结构示意图;
35.图6为判断真实声源位置的原理图;
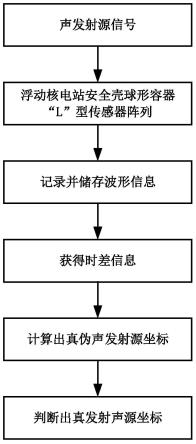
36.图7为声发射源定位方法的流程图。
具体实施方式
37.下面结合附图举例对本发明做更详细地描述:
38.结合图1-7,本发明一种适用于浮动式核电站安全壳球形容器的声发射源定位方法,包括如下步骤:
39.a)建立声发射源定位的“l”型传感器阵列;
40.b)记录并且存储各传感器接收到的来自声源的声发射信号;
41.c)分析声发射信号的波形图,得到到达不同传感器的时差;
42.d)根据时差确定真伪声发射源的位置,即结构损伤位置;
43.e)判断出真实声发射源的位置,即结构损伤的真实位置;
44.对于材料为声速各向同性的浮动式核电站安全壳球形容器和材料为声速各向异性的浮动式核电站安全壳球形容器,通过不同方法建立声发射源“l”型传感器阵列以及确定真伪声发射源的位置;
45.对于材料为声速各向同性的浮动式核电站安全壳球形容器,取三个传感器共同构成一个“l”型传感器阵列,并配合第四个传感器共同构成一个声发射源“z”型定位传感器阵列;
46.对于材料为声速各向异性的浮动式核电站安全壳球形容器,取六个传感器分别构成两组“l”型传感器阵列,共同构成声发射源定位传感器阵列;
47.对于材料为声速各向异性的浮动式核电站安全壳球形容器,通过两组“l”型传感器阵列分别确定声发射源所在的两个大圆,两个大圆在球面上的两个交点分别为真实声发射源和伪声发射源位置。
48.在步骤c)中,计算声源到任意两个传感器的传播时间差δt
ij
,其公式为:
49.δt
ij
=t
i-tj=(t
i-t0)-(t
j-t0)=t
i-tj=δt
ij
50.其中,t0为产生声发射波的准确时间,ti、tj为到达传感器的时刻,ti、tj为到达传感器的精准传播时间。
51.在步骤d)中,对于材料为声速各向同性的浮动式核电站安全壳球形容器,通过下列公式确定声源位置的纬度坐标θ
p
:
52.r*(π-θ
p
)-r*θ
p
=c*δt
24
53.其中,声源的球坐标为r为浮动式核电站球形壳体的半径,c为波速。
54.对于材料为声速各向同性的浮动式核电站安全壳球形容器,通过“l”型传感器阵
列的时差,通过下列公式确定声发射源位置的经度坐标由在(0,2π)范围内得到的两个值确定真实声发射源和伪声发射源的坐标:
55.其中,声发射源的球坐标为
56.在步骤e)中,“l”型传感器阵列的角平分线所在的大圆为等时线,通过等时线将球壳划分成两个半球,根据两个半球上的传感器接收到声发射波信号的先后即可判断出真实声发射源的位置。
57.当两个半球上的传感器接收到声波信号的时间不同时,先接收到声波信号的传感器所在半球上的声源为真实声发射源。
58.当两个半球上的传感器接收到声波信号的时间相同时,真实声源位于等时线所在大圆上,并通过比较三个传感器之间的时间差确定真实声发射源的位置。
59.实施例一:
60.图2示意性地显示了根据本发明的一种实施方式的一种适用于浮动式核电站安全壳球形容器表面的声发射源定位方法的“l”型传感器阵列的结构,图3显示了图2中的浮动式核电站安全壳球形容器表面的声发射源定位方法的各向同性浮动式核电站安全壳球形容器表面的声源定位的结构,图4显示了图1中的适用于浮动式核电站安全壳球形容器表面的声发射源定位方法的各向同性球形容器表面上计算声源纬度的原理,图5显示了图1中的浮动式核电站安全壳球形容器表面的声发射源定位方法的各向异性球形容器表面的声源定位的结构,图6显示了图1中的浮动式核电站安全壳球形容器表面的声发射源定位方法的判断真实声源位置的原理,图7显示了图2所示的适用于浮动式核电站安全壳球形容器表面的声发射源定位方法的流程。如图1-7所示,该定位方法主要包括五个步骤:第一步,根据浮动式核电站安全壳球形容器材料的声速分布性质建立声发射源定位传感器阵列;第二步,记录并且存储各传感器接收到的来自声源的声波信号;第三步,分析声波信号图,得到所需时差;第四步,根据时差确定真伪声发射源的位置,即结构损伤位置;第五步,判断出真实声发生源的位置,即结构损伤的真实位置。
61.第一步中的建立声发射源定位传感器阵列,需要根据浮动式核电站安全壳球形容器材料的声速分布性质进行,则对于材料为声速各向同性的浮动式核电站安全壳球形容器,以及材料为声速各向异性的浮动式核电站安全壳球形容器,其各自建立声发射源定位传感器阵列的方法不同。
62.对于材料为声速各向同性的浮动式核电站安全壳球形容器,其建立声发射源定位传感器阵列的方法为:在浮动式核电站安全壳球形容器中建立三维坐标,取三个传感器s1、s2和s3,将s2放在球形容器顶部作为原点,s1和s3分别布置在负x和负y方向,且与s2的距离为d,则设s1、s2和s3共同构成一个“l”型传感器阵列;然后,将另一个传感器s4放置在球形外壳的底部,并且使其相对于s2关于球心o对称,则该四个传感器共同构成声速各向同性的浮动式核电站安全壳球形容器表面声发射源定位传感器阵列。
63.对于材料为声速各向异性的浮动式核电站安全壳球形容器,其建立声发射源定位传感器阵列的方法为:在球形容器中建立三维坐标,取六个传感器s1、s2、s3、s4、s5和s6,将其中的s1、s2和s3以及s4、s5和s6分别构建成两个“l”型传感器阵列,并将两个“l”型传感器阵列
分别放置在球形壳体的顶部(z方向)和左侧(负y方向)。其中,顶部传感器阵列以s2为原点,s1和s3分别布置在负x和负y方向,且与s2的距离为d;而左侧传感器阵列以s5为原点,s4和s6分别布置在负x和负z方向,且与s5的距离为d。则该两组“l”型传感器阵列共同构成各向异性的浮动式核电站安全壳球形容器表面声发射源定位传感器阵列。
64.第二步中的记录并且存储各传感器接收到的来自声发射源的声波信号,采用现有的相应的设备即可完成。
65.第三步中的分析声波信号图,得到所需时差,具体方法如下所述。
66.在浮动式核电站安全壳球形容器的在薄球壳壁中传播的波都不是单一的波,声波在传播过程中不断地在边界之间反射和折射,形成包含很多模式的lamb波,使得传感器接收到的声波很复杂。而如果根据球壳壁的厚度选择合适的频率,则可以使球壳壁中只存在s0和a0低阶模式波。其中,s0模式波的速度往往最快,会成为最先到达的为首波,而通过首波的分析得到同一波阵面的到达时差。
67.由于声学事件产生声波的准确时间t0是未知的,所以无法从到达各传感器s1…
s6的不同时刻t1…
t8获得精准的传播时间t1…
t8,但是各声波之间的到达时间差却很容易获得,从声源p到第i、j个传感器si、si的传播时间差表示为δt
ij
,则
68.δt
ij
=t
i-tj=(t
i-t0)-(t
j-t0)=t
i-tj=δt
ij
69.虽然声波到达各传感器的时刻ti、tj和传播时间ti、tj不同,但是它们的差值δt
ij
和δt
ij
是一样的。通过分析传感器s1…
s6接收到的波形图,读取比较首波到达时刻,即可得到任意两个传感器的首波到达时差。其中,如果球形容器表面中的波速定义为c,传播距离定义为di,那么声波从第i个传感器到第j个传感器的时差与从第i个传感器到第j个传感器的距离关系为d
ij
=c
×
δt
ij
。
70.第四步中的根据时差确定声发射源位置,具体步骤如下所述。
71.通过一组“l”型传感器阵列的时差,可以确定一个声发射源所在的大圆即传播方向;假设各传感器s1、s2、和s3的坐标分别为(x1,y1)、(x2,y2)、(x3,y3),声源p的坐标是(x
p
,y
p
),则三个接收传感器的坐标关系为:x1=x
2-d,y1=y2,x3=x2以及y3=y
1-d。其中传感器之间的距离d需要远小于从声发射源p到形传感器阵列(s1、s2、和s3)的距离,因此从声发射源到达同一阵列中的三个传感器的斜率大致相同。
72.当声发射信号到达同一阵列中的传感器时,可以将波阵面看作相互平行的平面,即使对于各向异性的材料,声发射源到各传感器在方向α上的波速c(α)也可看做近似相同,则附图中的角度α根据几何关系可以表示为:
[0073][0074]
将传感器s1和s2接收到声发射信号的时间差定义为δt
21
,传感器s2和s3接收到声发射信号的时间差定义为δt
23
,则:
[0075][0076]
[0077]
由上述二式可得:
[0078][0079]
则声速可以表示为:
[0080][0081]
此外,由于传感器之间的距离d远小于球形壳体的半径r,因此可以忽略“l”型传感器阵列所在区域的曲率,将其视为一个平面。假设声源p的球坐标为则声源位置的经度可以近似为α,如附图3所示,则有
[0082][0083]
由此可以得到,声源位于经度所在的大圆上。
[0084]
对于各向同性球壳,参考附图4,根据声源到s2和s4的距离差,根据下式可以求出θ
p
:
[0085]
r*(π-θ
p
)-r*θ
p
=c*δt
24
[0086]
而由于球的空间对称性,往往会获得两个θ
p
值,则意味着在同一大圆上有一个真实声源和一个伪声源。
[0087]
而对于各向异性球壳,如附图5所示,两个“l”型传感器阵列可以分别确定声源所在的两个大圆。由于球的空间对称性,两个大圆在球面上具有两个交点。则两个交叉点之一是真实声源,另一个则是伪声源。
[0088]
假设α1是声发射源与s2所在的大圆a与本初子午线之间的角度,α2是声发射源与s5所在的大圆b与赤道之间的角度。
[0089]
对于大圆a,可以将其视为球面与法线向量n1的平面交点,其中法线向量n1为(sinα1,-cosα1,0),并且平面穿过球心。因此,该平面的参数方程可以表示为:
[0090]
sinα1x-cosα1y=0
[0091]
对于大圆b所在的平面,其法线向量n2为(sinα2,0,cosα2),则该平面的参数方程为:
[0092]
sinα2x cosα2z=0
[0093]
该两个平面的相交线穿过球心,并与球面有两个交点,而这两个交点就是真实声发射源和伪声发射源的位置。其中,真伪声发射源坐标可以通过联立两个平面和球面的参数方程获得,具体如下:
[0094][0095]
然后,根据θs和的取值范围,即可获得真实声发射源和伪声发射源坐标。
[0096]
第五步中的判断真实声发射源的位置的具体方法如下所述。
[0097]“l”型传感器阵列的角平分线所在的大圆为等时线,则在该大圆上的声源到达传感器s1和s3的时间相同。如附图6所示,等时线将球壳划分成a、b两个半球,其中a半球是传感器s1所在的半球,b半球是传感器s3所在的半球,则根据传感器s1和s3接收到声波信号的先后即可判断出真实声源的位置。
[0098]
其中,如果传感器s3比s1先接收到声波信号,即t3<t1,则位于b半球上的声源是真实声源;相反,如果t1<t3,则位于a半球上的声源是真实的声源;而如果t3=t1,则表示真实声源在等时线大圆上。而z轴将等时线大圆分成a、b两个半圆,则真实声源在等时线大圆上时,可以通过比较传感器s2和s1(或s3)之间的时间差,以确定真实声源位于等时线的哪个半圆上。例如,如果t2>t1=t3,则真实声源位于等时线的半圆b上;如果t2<t1=t3,则真实声源位于等时线的半圆a上。
[0099]
实施例二:
[0100]
具体步骤如下:
[0101]
步骤a,在直径为60cm的各向异性球形容器表面上建立球坐标系,s2和s5的坐标分别为(0
°
,0
°
),(270
°
,90
°
)。传感器间隔d为2cm,s1、s2和s3共同构成一个“l”型传感器阵列,s4、s5和s6共同构成一个“l”型传感器阵列,两组“l”型传感器阵列共同构成各向异性的球形容器表面声发射源定位传感器阵列。
[0102]
步骤b,用铅笔在随机选取的位置折断笔芯,模拟声发射源。
[0103]
步骤c,记录并且存储各传感器接收到的来自声源的声发射信号。
[0104]
步骤d,通过各传感器收集到的声发射信号到达时间,计算出各传感器之间的时差δt
ij
。
[0105]
步骤e,根据各向异性的浮动式核电站安全壳球形容器表面声发射源定位方法确定坐标的经纬度:
[0106][0107]
根据θs和的取值范围,获得真伪声发射源坐标。
[0108]
其中,在步骤e中,通过比较s1、s2和s3接收到声发射信号的先后顺序,区分出真伪声发射源坐标。实际声发射源坐标定义为预测声发射源坐标定义为表中误差计算公式为:
[0109][0110]
通过多次改变模拟声源的位置,进行重复实验,实验结果表明不同声发射源位置预测的误差都不大,证明该技术能够在浮动式核电站安全壳球形容器表面实现声发射源的快速定位。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。