技术特征:
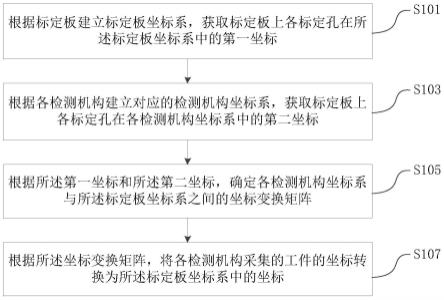
1.一种转盘检测系统的数据融合方法,其特征在于,所述方法应用于转盘检测系统,所述转盘检测系统包括转盘、转盘驱动件和环绕所述转盘设置的至少两个检测模块,所述转盘上设有标定板和至少两个用于安置工件的装载件,所述标定板上设有多个标定孔,所述转盘驱动件能够驱动所述转盘旋转,以使所述标定板和任一所述装载件均能在各个检测模块之间流转,每个所述检测模块包括至少一个检测机构,所述检测机构为相机或者激光器;所述方法包括:根据标定板建立标定板坐标系,获取标定板上各标定孔在所述标定板坐标系中的第一坐标;根据各检测机构建立对应的检测机构坐标系,获取标定板上各标定孔在各检测机构坐标系中的第二坐标;根据所述第一坐标和所述第二坐标,确定各检测机构坐标系与所述标定板坐标系之间的坐标变换矩阵;根据所述坐标变换矩阵,将各检测机构采集的工件的坐标转换为所述标定板坐标系中的坐标。2.根据权利要求1所述的方法,其特征在于,所述根据标定板建立标定板坐标系,获取标定板上各标定孔在所述标定板坐标系中的第一坐标包括:以所述标定板为依据建立世界坐标系xyz作为标定板坐标系,采集所述标定板上每个标定孔的中心点在标定板坐标系中的坐标,记为第一坐标。3.根据权利要求1所述的方法,其特征在于,所述根据各检测机构建立对应的检测机构坐标系,获取标定板上各标定孔在各检测机构坐标系中的第二坐标包括:如果所述检测机构为相机,则以所述相机为依据建立直角坐标系xy作为检测机构坐标系,在标定板随转盘转动至所述相机视野范围内时,通过相机采集所述标定板上每个标定孔的中心点在检测机构坐标系中的坐标,记为第二坐标;如果所述检测机构为激光器,则以所述激光器为依据建立世界坐标系xyz作为检测机构坐标系,在标定板随转盘转动至与所述激光器的采集面相对时,通过激光器采集所述标定板上每个标定孔的中心点在检测机构坐标系中的坐标,记为第二坐标。4.根据权利要求3所述的方法,其特征在于,所述根据所述第一坐标和所述第二坐标,确定各检测机构坐标系与所述标定板坐标系之间的坐标变换矩阵,包括:以任一检测机构为目标检测机构,获取所述目标检测机构采集的各标定孔的第二坐标;根据所述第二坐标与所述标定孔之间的映射关系和所述第一坐标与所述标定孔之间的映射关系,确定第二坐标与所述第一坐标之间的映射关系;根据所述第一坐标、所述第二坐标以及所述第二坐标与所述第一坐标之间的映射关系,计算将所述目标检测机构对应的检测机构坐标系旋转至所述标定板坐标系的旋转变换矩阵,将所述旋转变换矩阵作为所述目标检测机构的检测机构坐标系与所述标定板坐标系之间的坐标变换矩阵;返回执行以任一检测机构为目标检测机构,获取所述目标检测机构采集的各标定孔的第二坐标的步骤,直至获得所有检测机构坐标系与所述标定板坐标系之间的坐标变换矩阵。
5.根据权利要求4所述的方法,其特征在于,所述获取所述目标检测机构采集的各标定孔的第二坐标包括:判断所述目标检测机构采集的各标定孔的第二坐标是否为二维坐标;如果所述第二坐标是二维坐标,则获取所述目标检测机构与所述转盘的相对位置关系以及所述转盘的厚度,根据所述目标检测机构与所述转盘的相对位置关系以及所述转盘的厚度将所述第二坐标转换为三维坐标。6.根据权利要求5所述的方法,其特征在于,所述目标检测机构与所述转盘的相对位置关系包括所述目标检测机构位于所述转盘的上方或下方;所述根据所述目标检测机构与所述转盘的相对位置关系以及所述转盘的厚度将所述第二坐标转换为三维坐标包括:如果所述目标检测机构位于所述转盘的上方,则所述第二坐标的z轴坐标值为0,如果所述目标检测机构位于所述转盘的下方,则所述第二坐标的z轴坐标值为所述转盘厚度值取负。7.根据权利要求5所述的方法,其特征在于,如果所述目标检测机构为位于所述转盘上方的激光器,则所述目标检测机构采集的第二坐标的z轴坐标值为0;如果所述目标检测机构为位于所述转盘下方的激光器,则所述目标检测机构采集的第二坐标的z轴坐标值为所述转盘厚度值取负。8.一种转盘检测系统,其特征在于,包括:工作台,所述工作台上设有上下料工位和至少两个检测工位;转移模块,设于所述工作台上,包括转盘、转盘驱动件、标定板和至少两个用于安置工件的装载件,所述标定板上设有多个标定孔,所述标定板和至少两个装载件沿所述转盘的周向依次设于所述转盘的边缘,所述转盘驱动件用于驱动所述转盘转动,以使所述标定板及任一所述装载件均能在所述上下料工位和各检测工位之间依次流转;当任一装载件与所述上下料工位或者任一检测工位相对时,其余装载件分别与其他工位一一相对;与检测工位一一对应设置的检测模块,每个检测模块包括驱动机构和检测机构,所述驱动机构设于工作台上,所述驱动机构用于带动所述检测机构相对于所述标定板和所述装载件移动,所述检测机构包括相机或者激光器;控制装置,包括控制器和处理器;所述控制器分别与所述转盘驱动件和每个检测模块的驱动机构连接,用于驱动所述转盘驱动件和各驱动机构动作;所述处理器与每个检测模块的检测机构信号连接,用于:获取所述标定板上各标定孔在标定板坐标系中的第一坐标以及各检测机构采集的各标定孔在检测机构坐标系中的第二坐标;根据所述第一坐标和所述第二坐标,确定各检测机构坐标系与所述标定板坐标系之间的坐标变换矩阵;根据所述坐标变换矩阵,将各检测机构采集的工件的坐标转换为所述标定板坐标系中的坐标。9.根据权利要求8所述的转盘检测系统,其特征在于,所述处理器包括:第一坐标获取单元,用于根据标定板建立标定板坐标系,获取标定板上各标定孔在所述标定板坐标系中的第一坐标;第二坐标获取单元,用于根据各检测机构建立对应的检测机构坐标系,获取标定板上各标定孔在各检测机构坐标系中的第二坐标;转换关系确定单元,用于根据所述第一坐标和所述第二坐标,确定各检测机构坐标系
与所述标定板坐标系之间的坐标变换矩阵;转换单元,用于根据所述坐标变换矩阵,将各检测机构采集的工件的坐标转换为所述标定板坐标系中的坐标。10.根据权利要求9所述的转盘检测系统,其特征在于,所述转换关系确定单元用于:以任一检测机构为目标检测机构,获取所述目标检测机构采集的各标定孔的第二坐标;根据所述第二坐标与所述标定孔之间的映射关系和所述第一坐标与所述标定孔之间的映射关系,确定第二坐标与所述第一坐标之间的映射关系;根据所述第一坐标、所述第二坐标以及所述第二坐标与所述第一坐标之间的映射关系,计算将所述目标检测机构对应的检测机构坐标系旋转至所述标定板坐标系的旋转变换矩阵,将所述旋转变换矩阵作为所述目标检测机构的检测机构坐标系与所述标定板坐标系之间的坐标变换矩阵;返回执行以任一检测机构为目标检测机构,获取所述目标检测机构采集的各标定孔的第二坐标的步骤,直至获得所有检测机构坐标系与所述标定板坐标系之间的坐标变换矩阵。
技术总结
本发明公开一种转盘检测系统的数据融合方法。该方法应用于转盘检测系统,包括:根据标定板建立标定板坐标系,获取标定板上各标定孔在所述标定板坐标系中的第一坐标;根据各检测机构建立对应的检测机构坐标系,获取标定板上各标定孔在各检测机构坐标系中的第二坐标;根据所述第一坐标和所述第二坐标,确定各检测机构坐标系与所述标定板坐标系之间的坐标变换矩阵;根据所述坐标变换矩阵,将各检测机构采集的工件的坐标转换为所述标定板坐标系中的坐标。本发明基于坐标变换矩阵,将各检测模块采集的工件的坐标数据融合至同一三维坐标系,从而可以迅速获得工件的尺寸等信息,其运算简单,检测效率高。检测效率高。检测效率高。
技术研发人员:陆平
受保护的技术使用者:苏州博众智能机器人有限公司
技术研发日:2022.11.18
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。