技术特征:
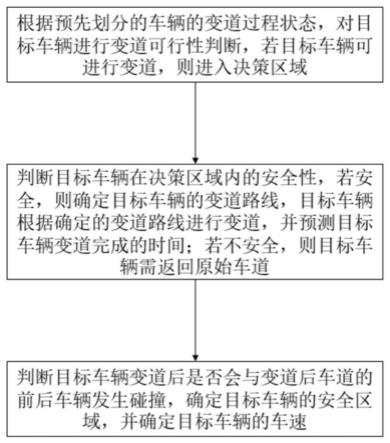
1.一种无人驾驶车辆的变道方法,其特征在于,包括:根据预先划分的车辆的变道过程状态,对目标车辆进行变道可行性判断,若目标车辆可进行变道,则进入决策区域;判断目标车辆在决策区域内的安全性,若安全,则确定目标车辆的变道路线,目标车辆根据确定的变道路线进行变道,并预测目标车辆变道完成的时间;若不安全,则目标车辆需返回原始车道;判断目标车辆变道后是否会与变道后车道的前后车辆发生碰撞,确定目标车辆的安全区域,并确定目标车辆的车速。2.如权利要求1所述的一种无人驾驶车辆的变道方法,其特征在于,所述车辆的变道过程状态包括保持车辆状态、改变车辆状态、到达目标车道状态和车辆调整状态。3.如权利要求1所述的一种无人驾驶车辆的变道方法,其特征在于,所述根据预先划分的车辆的变道过程状态,对目标车辆进行变道可行性判断,若目标车辆可进行变道,则进入决策区域,包括:变道过程的变道场景包括目标车辆所在的车道以及需变道的目标车道两条车道,涉及的车辆包括目标车辆所在车道的目标车辆和目标车辆的前车辆、后车辆以及需变道的目标车道中与目标车辆距离最近的前车辆和后车辆;在进行变道过程前,对目标车辆进行变道可行性判断,判断目标车辆是否会与周围车辆发生碰撞,若目标车辆可进行变道,则进入决策区域。4.如权利要求3所述的一种无人驾驶车辆的变道方法,其特征在于,所述在进行变道过程前,对目标车辆进行变道可行性判断,判断目标车辆是否会与周围车辆发生碰撞,若目标车辆可进行变道,则进入决策区域,包括:
①
定义函数f(x)={f(x,u),u∈u}和车辆a、b、c和d之间的向量ac、ab、ba、bd、ca、cd、db和dc,其中,x为车辆的状态;u为控制变量,包括制动踏板的深度和方向盘的转角;u为控制变量组成的集合;a为与目标车辆距离最近的前车辆;b为与目标车辆距离最近的后车辆;c为目标车辆的前车辆;d目标车辆的后车辆;
②
若则目标车辆保持车辆状态;若则进入步骤
③
;
③
若则目标车辆保持车辆状态;若则进入步骤
④
;
④
若则目标车辆保持车辆状态;若则进入步骤
⑤
;
⑤
若则目标车辆保持车辆状态;若则目标车辆可进行换道,改变车辆状态,目标车辆进入决策区域;其中,a、b为满足归一化条件的权重系数;u1为控制变量。5.如权利要求4所述的一种无人驾驶车辆的变道方法,其特征在于,所述判断目标车辆在决策区域内的安全性,若安全,则确定目标车辆的变道路线,目标车辆根据确定的变道路线进行变道,并预测目标车辆变道完成的时间;若不安全,则目标车辆需返回原始车道,包
括:判断目标车辆在决策区域内的安全性,若安全,则确定目标车辆的变道路线;若不安全,则目标车辆需返回原始车道;目标车辆根据确定的变道路线进行变道,并预测目标车辆变道完成的时间。6.如权利要求5所述的一种无人驾驶车辆的变道方法,其特征在于,所述判断目标车辆在决策区域内的安全性,若安全,则确定目标车辆的变道路线;若不安全,则目标车辆需返回原始车道,包括:将决策区域设定为一个正六边形区域;根据目标车辆的位置,确定正六边形区域以及以正六边形的顶点为顶点的凸锥t
k
(g)=f(x,u1),其中,k表示正六边形点集,g表示六边形的一个顶点;根据正六边形的凸锥t
k
(g)=f(x,u1),判断目标车辆在一个正六边形区域内的安全性,当正六边形区域的六个点上的凸锥和函数f(x)存在交集,则目标车辆安全,确定目标车辆的变道路线;反之,则目标车辆需返回原始车道。7.如权利要求1所述的一种无人驾驶车辆的变道方法,其特征在于,所述判断目标车辆变道后是否会与变道后车道的前后车辆发生碰撞,确定目标车辆的安全区域,并确定目标车辆的车速,包括:基于目标车辆的动力学方程,判断目标车辆变道后是否会与变道后车道的前后车辆发生碰撞,确定目标车辆的安全区域,并确定目标车辆的车速,其中,目标车辆的动力学方程为:其中,x(t)为目标车辆的水平位移;u(t)为目标车辆制动踏板的深度;t为时间。8.一种无人驾驶车辆的变道系统,其特征在于,包括:可行性判断模块,用于根据预先划分的车辆的变道过程状态,对目标车辆进行变道可行性判断,若目标车辆可进行变道,则进入决策区域;安全性判断模块,用于判断目标车辆在决策区域内的安全性,若安全,则确定目标车辆的变道路线,目标车辆根据确定的变道路线进行变道,并预测目标车辆变道完成的时间;若不安全,则目标车辆需返回原始车道;碰撞判断模块,用于判断目标车辆变道后是否会与变道后车道的前后车辆发生碰撞,确定目标车辆的安全区域,并确定目标车辆的车速。9.一种处理设备,其特征在于,包括计算机程序指令,其中,所述计算机程序指令被处理设备执行时用于实现权利要求1-7中任一项所述的无人驾驶车辆的变道方法对应的步骤。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序指令,其中,所述计算机程序指令被处理器执行时用于实现权利要求1-7中任一项所述的无人驾驶车辆的变道方法对应的步骤。
技术总结
本发明涉及一种无人驾驶车辆的变道方法及系统,其特征在于,包括:根据预先划分的车辆的变道过程状态,对目标车辆进行变道可行性判断,若目标车辆可进行变道,则进入决策区域;判断目标车辆在决策区域内的安全性,若安全,则确定目标车辆的变道路线,目标车辆根据确定的变道路线进行变道,并预测目标车辆变道完成的时间;若不安全,则目标车辆需返回原始车道;判断目标车辆变道后是否会与变道后车道的前后车辆发生碰撞,确定目标车辆的安全区域,并确定目标车辆的车速,本发明可以广泛应用于无人驾驶领域中。驾驶领域中。驾驶领域中。
技术研发人员:陈征
受保护的技术使用者:宁波工程学院
技术研发日:2022.11.16
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。