1.本公开实施例涉及汽车技术领域,具体涉及一种车门控制方法、装置、电子设备和存储介质。
背景技术:
2.随着经济的发展,汽车保有量也开始逐年增加。伴随着汽车的普及,交通事故发生率随之提高。其中,不当的汽车开门行为也是一种频发的交通事故。
3.汽车开门碰撞事故大多由于下车人员没有观察周围的交通环境或者误判,而直接打开车门造成。乘客在日常的乘坐汽车的过程中,尤其是车后排的乘客,在打开车门的时候,需要查看汽车侧方、前方、后方是否有行人或车门外是否有障碍物。当乘客在确定没有行人或障碍物时,再打开车门才会避免碰撞事故的发生。但是往往由于乘客会在观察不到的情况而去打开车门,这时候易出现行人因躲避不及,造成车门被后方车辆撞毁、下车人员被撞伤甚至死亡的情况。
4.因此,由于视线范围有限,现有技术中乘客下车将车门打开时,容易发生碰撞事故。此外,乘客自行判断打开车门时,由于无法准确判断周围车辆或者行人是否会与车门发生碰撞,无法确定合适的开门时机,很有可能与逐渐靠近的车辆或者行人发生碰撞,造成车辆的损坏以及损害人身安全。
技术实现要素:
5.为了解决现有技术存在的至少一个问题,本公开的至少一个实施例提供了一种车门控制方法、装置、电子设备和存储介质。
6.第一方面,本公开实施例提出一种车门控制方法,包括:
7.获取外部障碍物速度、外部障碍物与本车的距离、以及开门请求;
8.根据所述外部障碍物速度、所述外部障碍物与本车的距离、以及车门延迟开启时间模型确定车门延迟开启时间;
9.根据所述开门请求以及所述车门延迟开启时间控制所述车门。
10.可选的,所述根据所述外部障碍物速度、所述外部障碍物与本车的距离、以及车门延迟开启时间模型确定车门延迟开启时间,包括:
11.若所述外部障碍物与本车的距离大于第一阈值,确定所述车门延迟开启时间为零。
12.可选的,所述根据所述外部障碍物速度、所述外部障碍物与本车的距离、以及车门延迟开启时间模型确定车门延迟开启时间,包括:
13.根据所述外部障碍物速度确定相邻两采集时刻的外部障碍物加速度;
14.根据所述外部障碍物与本车的距离、相邻两采集时刻的外部障碍物加速度,以及车门延迟开启时间模型确定车门延迟开启时间。
15.可选的,还包括:获取预先设置的车门延迟开启时间模型;
16.其中,所述车门延迟开启时间模型包括所述外部障碍物与本车的距离、相邻两采集时刻的外部障碍物加速度与车门延迟开启时间的映射表;所述外部障碍物与本车的距离越大,车门延迟开启时间越大;相邻两采集时刻的外部障碍物加速度越大,车门延迟开启时间越小。
17.所述外部障碍物与本车的距离、所述相邻两采集时刻的外部障碍物加速度均划分为多个范围区间。
18.可选的,还包括:采用机器学习方法,根据历史外部障碍物与本车的距离数据、历史相邻两采集时刻的外部障碍物加速度数据,以及历史车门延迟开启时间数据训练得到车门延迟开启时间模型。
19.可选的,还包括:
20.获取车内人员信息并根据车内人员信息确定待开启车门;
21.所述根据所述开门请求以及所述车门延迟开启时间控制所述车门包括:
22.根据所述开门请求以及所述车门延迟开启时间控制所述待开启车门。
23.可选的,所述获取车内人员信息包括:
24.获取车内图像信息和/或座椅上的重量信息;
25.根据所述车内图像信息和/或所述座椅上的重量信息确定车内人员信息。
26.可选的,在获取外部障碍物速度、外部障碍物与本车的距离、以及开门请求之前,还包括:
27.获取本车车速;
28.在本车车速小于第二阈值时,触发获取外部障碍物速度、外部障碍物与本车的距离、以及开门请求。
29.可选的,在获取外部障碍物速度以及外部障碍物与本车的距离之时,获取车内人员信息并根据车内人员信息确定待开启车门;和/或,获取开门请求。
30.可选的,在获取开门请求之后,获取外部障碍物速度以及外部障碍物与本车的距离,和/或,获取车内人员信息并根据车内人员信息确定待开启车门。
31.可选的,在获取开门请求之后,获取外部障碍物速度以及外部障碍物与本车的距离之前,获取车内人员信息并根据车内人员信息确定待开启车门。
32.可选的,在根据所述开门请求以及所述车门延迟开启时间控制所述车门之时,还包括:
33.若所述车门延迟开启时间大于第三阈值,进行语音提示。
34.第二方面,本公开实施例提出一种车门控制装置,包括:
35.监测模块,用于获取外部障碍物速度、外部障碍物与本车的距离、以及开门请求;
36.逻辑模块,用于根据所述外部障碍物速度、所述外部障碍物与本车的距离、以及车门延迟开启时间模型确定车门延迟开启时间;
37.执行模块,用于根据所述开门请求以及所述车门延迟开启时间控制所述车门。
38.第三方面,本公开实施例提出一种电子设备,包括:
39.一个或多个处理器;
40.存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如上述第一方面所述的车门控制方法。
41.第四方面,本公开实施例提出一种包括程序指令的计算机可读存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行如上述第一方面所述的车门控制方法。
42.可见,本公开的至少一个实施例中,通过获取外部障碍物速度、外部障碍物与本车的距离,然后根据外部障碍物速度、外部障碍物与本车的距离、以及车门延迟开启时间模型确定车门延迟开启时间,能够根据开门请求以及车门延迟开启时间控制车门。由于能够根据车门延迟开启时间模型准确计算车门延迟开启时间,因此可以智能化的在恰当的时机开启车门,避免车门打开时发生碰撞事故。
附图说明
43.为了更清楚地说明本公开实施例的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
44.图1为本公开实施例提供的车门控制方法的流程示意图;
45.图2为本公开实施例提供的又一种车门控制方法的流程示意图;
46.图3为本公开实施例提供的又一种车门控制方法的流程示意图;
47.图4为本公开实施例提供的又一种车门控制方法的流程示意图;
48.图5为本公开实施例提供的又一种车门控制方法的流程示意图;
49.图6为本公开实施例提供的一种车门控制逻辑原理图;
50.图7为本公开实施例提供的一种车门控制装置的结构框图;
51.图8为本公开实施例提供的一种电子设备的框图。
具体实施方式
52.为了能够更清楚地理解本公开的上述目的、特征和优点,下面结合附图和实施例对本公开作进一步的详细说明。可以理解的是,所描述的实施例是本公开的一部分实施例,而不是全部的实施例。此处所描述的具体实施例仅仅用于解释本公开,而非对本公开的限定。基于所描述的本公开的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本公开保护的范围。
53.需要说明的是,在本文中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。
54.汽车开门碰撞事故大多是由于下车人员没有观察周围的交通环境或者误判,而直接打开车门造成的。乘客在日常乘坐汽车的过程中,尤其是车后排的乘客,在打开车门的时候,需要查看汽车侧方、前方、以及后方是否有行人或车门外是否有障碍物。当乘客在确定上述方位没有行人或障碍物时打开车门才会避免碰撞事故的发生。但是由于视线范围有限,乘客有时会在观察不到的情况下去打开车门,这时候易出现行人因躲避不及出现碰撞,造成车门被后方车辆撞毁、下车人员被撞伤甚至死亡的情况。因此,由于视野范围有限,现有技术中乘客下车将车门打开时,易发生碰撞事故。此外,乘客自行判断打开车门时,由于无法准确判断周围车辆或者行人的是否会与车门发生碰撞,因此无法确定合适的开门时机,很有可能与逐渐靠近的车辆或者行人发生碰撞,造成车辆的损坏以及损害人身安全。
55.鉴于以上所述现有技术的缺点,本公开实施例提供一种车门控制方法。在详细介绍本公开的具体实施方式之前,首先对本公开的应用场景进行以下说明,本公开可以应用于车辆中,该车辆可以是自动驾驶车辆,也可以是非自动驾驶车辆。本公开实施例提供的车门控制方法的方案,可应用于多种场景。例如乘客开门下车的情况以及乘客开门上车的情况等。
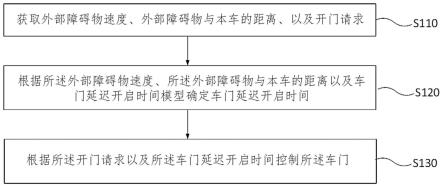
56.图1为本公开实施例提供的车门控制方法的流程示意图。如图1所示,车门控制方法包括s110至s130:
57.s110、获取外部障碍物速度、外部障碍物与本车的距离、以及开门请求。
58.外部障碍物例如包括外部车辆以及行人等。该步骤中的外部障碍物速度以及外部障碍物与本车的距离可以通过传感器获取。本公开实施例对传感器的设置位置不作限定,可以设置在车门上,例如4个车门上均设置有传感器。传感器例如可以包括毫米波雷达,以用于获取外部障碍物速度以及外部障碍物与本车的距离。此外,传感器也可以额外地包括毫米波雷达以外的其它辅助测距或测速装置,例如双目摄像头等装置,从而更加精准地获取车辆周围障碍物的信息。本公开实施例对传感器的类型以及数量不作限定。
59.需要说明的是,本发明实施例对获取外部障碍物速度、外部障碍物与本车的距离、以及获取开门请求的顺序不作限定。例如可以同时获取外部障碍物速度、外部障碍物与本车的距离、以及开门请求;也可以先获取外部障碍物速度、外部障碍物与本车的距离,再获取开门请求;亦或者先获取开门请求,再获取外部障碍物速度、以及外部障碍物与本车的距离。
60.s120、根据所述外部障碍物速度、所述外部障碍物与本车的距离、以及车门延迟开启时间模型确定车门延迟开启时间。
61.其中,车门延迟开启时间是指,自接收到开门请求后,控制车门延迟开启的时间。车门延迟开启时间模型可以预先设置。车门延迟开启时间模型例如可以是映射表的形式,也可以是模型训练的方式生成。本步骤中可以根据外部障碍物速度、外部障碍物与本车的距离、以及车门延迟开启时间模型自动确定车门延迟开启时间,无需乘客自行观察车辆外部环境。
62.s130、根据所述开门请求以及所述车门延迟开启时间控制所述车门。
63.其中,该开门请求可以是基于乘客特定动作,例如为通过拉动车门把手动作,也可以是触碰或按下车辆上的某个按键,还可以是通过语音感测装置感测到的语音指令。例如“下车”、“开门”、“开启车门”、“我要下车”等。开门请求例如可以通过中断触发的形式,也可以通过周期性采集的形式。
64.根据外部障碍物速度、外部障碍物与本车的距离以及车门延迟开启时间模型,预测接近本车的障碍物在开启车门后有可能发生碰撞,那么可以按照上述步骤计算的车门延迟开启时间锁定车门,暂不开启,待外部障碍物通过后,再开启车门。
65.本公开实施例通过实时采集外部障碍物速度、外部障碍物与本车的距离、以及预先设置的车门延迟开启时间模型可以准确确定车门延迟开启时间,选择合适的时机打开车门,待逐渐靠近的车辆或者行人通过后再控制车门的开启。本公开实施例无需乘客自行判断车辆外部环境,因此可以避免乘客自行判断打开车门容易导致碰撞事故的问题。
66.在一些实施例中,可选的,步骤s120根据所述外部障碍物速度、所述外部障碍物与
本车的距离、以及车门延迟开启时间模型确定车门延迟开启时间,可以包括:若外部障碍物与本车的距离大于第一阈值,确定车门延迟开启时间为零。
67.若外部障碍物与本车的距离大于第一阈值,说明此时外部障碍物与本车的距离较远。该种情况下,外部障碍物(车辆或者行人)有足够的时间变更行驶路径,或进行减速,以避免与本车发生碰撞。因此本公开实施例可以立即响应开门请求,即车门延迟开启时间为零,无需等待外部障碍物通过车门后再打开车门,避免乘客等待较长的车门延迟开启时间。
68.需要说明的是,上述第一阈值可以根据实际情况而设置,本公开实施例对此不作限定。
69.在一些实施例中,可选的,步骤s120根据所述外部障碍物速度、所述外部障碍物与本车的距离、以及车门延迟开启时间模型确定车门延迟开启时间,可以包括:
70.s121、根据外部障碍物速度确定相邻两采集时刻的外部障碍物加速度。
71.s122、根据外部障碍物与本车的距离、相邻两采集时刻的外部障碍物加速度,以及车门延迟开启时间模型确定车门延迟开启时间。
72.本公开实施例可以按照一定频率采集外部障碍物速度以及外部障碍物与本车的距离。例如若相邻两采集时刻外部障碍物速度分别为v(k-1)和v(k),那么相邻两采集时刻的外部障碍物加速度a=(v(k)-v(k-1))/
△
t。k时刻的外部障碍物与本车的距离为p(k)。其中,a表示相邻两采集时刻的外部障碍物加速度,
△
t表示相邻两采集时刻的时间间隔。本公开实施例中,车门延迟开启时间模型包括两个输入量,分别为外部障碍物与本车的距离、和相邻两采集时刻的外部障碍物加速度,车门延迟开启时间模型最终输出车门延迟开启时间。
73.本公开实施例中,相邻两采集时刻的外部障碍物加速度能反应外部障碍物的运动趋势,例如加速趋势还是减速趋势,加速或减速快慢程度等。外部障碍物与本车的距离可以反应外部障碍物距离本车的远近。由于本公开实施例中车门延迟开启时间模型的输入量综合考虑了外部障碍物的运动趋势以及外部障碍物距离本车的远近,因此本公开实施例中根据外部障碍物与本车的距离、相邻两采集时刻的外部障碍物加速度、以及预设的门延迟开启时间模型预测外部障碍物接近本车车门的趋势的方式,可以更准确的确定车门开启时机。
74.在一些实施例中,可选的,还包括获取预先设置的车门延迟开启时间模型。
75.本公开实施例可以预先设置车门延迟开启时间模型,车门延迟开启时间模型可以是映射表的形式。即,车门延迟开启时间模型包括外部障碍物与本车的距离、相邻两采集时刻的外部障碍物加速度与车门延迟开启时间的映射表。其中,外部障碍物与本车的距离越大,车门延迟开启时间越大;相邻两采集时刻的外部障碍物加速度越大,车门延迟开启时间越小。
76.本公开实施例中,车门延迟开启时间,和,外部障碍物与本车的距离为正相关;车门延迟开启时间,和,相邻两采集时刻的外部障碍物加速度为负相关。外部障碍物与本车的距离越大,说明外部障碍物与本车车门距离越远,因此外部障碍物经过本车车门所花时间越大,那么车门延迟开启时间应设置越大。相邻两采集时刻的外部障碍物加速度越大,说明外部障碍物正在加速,因此外部障碍物经过本车车门所花时间也就越小,那么车门延迟开启时间应设置越小。
77.本公开实施例通过预先建立映射表形式的车门延迟开启时间模型,车门延迟开启时间模型表征了车门延迟开启时间、外部障碍物与本车的距离、以及相邻两采集时刻的外部障碍物加速度之间的映射关系。在实时获取外部障碍物速度、以及外部障碍物与本车的距离后,可以通过查表的方式准确确定该外部障碍物速度、以及外部障碍物与本车的距离所对应的车门延迟开启时间。
78.在一些实施例中,可选的,由于外部障碍物与本车的距离、相邻两采集时刻的外部障碍物加速度,均为连续变量,因此可以将外部障碍物与本车的距离、相邻两采集时刻的外部障碍物加速度均划分为多个范围区间。映射表中的3个参量分别为外部障碍物与本车的距离、相邻两采集时刻的外部障碍物加速度,以及车门延迟开启时间。其中,外部障碍物与本车的距离、相邻两采集时刻的外部障碍物加速度均划分为多个范围区间。由于外部障碍物与本车的距离、相邻两采集时刻的外部障碍物加速度为连续值,因此本实施例将映射表中外部障碍物与本车的距离、相邻两采集时刻的外部障碍物加速度,均划分为多个范围区间,通过查找实时确定的外部障碍物与本车的距离、相邻两采集时刻的外部障碍物加速度在映射表中对应的范围区间,进而确定车门延迟开启时间。
79.下面通过一个映射表实例进行详细介绍。
80.表1示例性提供一种外部障碍物与本车的距离、相邻两采集时刻的外部障碍物加速度,与车门延迟开启时间的映射表。参见表1,外部障碍物与本车的距离p划分为逐渐增加的8个范围区间,依次为范围区间sss、范围区间ss、范围区间s、范围区间ms、范围区间bs、范围区间sb、范围区间b、范围区间mb。其中,sss表示0m≤p《1m;ss表示1m≤p《2m;s表示2m≤p《3m;ms表示3m≤p《4m;bs表示4m≤p《5m;sb表示5m≤p《6m;b表示6m≤p《7m;mb表示p≥7m。
81.表1:外部障碍物与本车的距离、相邻两采集时刻的外部障碍物加速度,与车门延迟开启时间的映射表
[0082][0083]
相邻两采集时刻的外部障碍物加速度a划分为逐渐增加的7个范围区间,依次为范
围区间nb、范围区间nm、范围区间ns、范围区间z、范围区间ps、范围区间pm、范围区间pb。相邻两采集时刻的外部障碍物加速度具有正负,范围区间nb、范围区间nm、范围区间ns的相邻两采集时刻的外部障碍物加速度为负值。范围区间ps、范围区间pm、范围区间pb的相邻两采集时刻的外部障碍物加速度为正值。范围区间z表示相邻两采集时刻的外部障碍物加速度为零。相邻两采集时刻的外部障碍物加速度为负值,表示外部障碍物减速,相邻两采集时刻的外部障碍物加速度为正值,表示外部障碍物加速。
[0084]
车门延迟开启时间d包括9个依次增加的车门延迟开启时间值,分别为o、sso、so、mso、bso、sbo、bo、mbo、bbo。其中,o表示车门延迟开启时间为零。
[0085]
需要说明的是,表1中外部障碍物与本车的距离的各范围区间的值仅为示例性的展示,本公开实施例对此不作限定。此外,表1中未标注相邻两采集时刻的外部障碍物加速度的各范围区间的具体数值,以及未标注映射表中各车门延迟开启时间的具体数值。本领域技术人员可以根据实际情况设置外部障碍物与本车的距离各范围区间的具体数值、相邻两采集时刻的外部障碍物加速度各范围区间的具体数值,以及映射表中各车门延迟开启时间的具体数值。以表1为例,若获取的外部障碍物与本车的距离p位于范围区间mb,即外部障碍物与本车的距离p大于等于7m,说明外部障碍物与本车较远,可以设置车门延迟开启时间为零。若获取的外部障碍物与本车的距离p位于范围区间ms,获取的相邻两采集时刻的外部障碍物加速度a位于范围区间ps,那么可以根据映射表确定车门延迟开启时间d为mso。若获取的外部障碍物与本车的距离p位于范围区间b,获取的相邻两采集时刻的外部障碍物加速度a位于范围区间nm,那么可以根据映射表确定车门延迟开启时间d为mbo。
[0086]
在一些实施例中,可选的,还包括采用机器学习方法,根据历史外部障碍物与本车的距离数据、历史相邻两采集时刻的外部障碍物加速度数据,以及历史车门延迟开启时间数据训练得到车门延迟开启时间模型。即通过模型训练的方式建立车门延迟开启时间模型。
[0087]
本公开实施例不限定机器学习方法的类型,将历史外部障碍物与本车的距离数据、以及历史相邻两采集时刻的外部障碍物加速度数据作为输入信息,将历史车门延迟开启时间数据作为输出信息,建立历史外部障碍物与本车的距离数据、历史相邻两采集时刻的外部障碍物加速度数据、与历史车门延迟开启时间数据的对应关系,得到车门延迟开启时间模型。
[0088]
在一些实施例中,可选的,还可以包括:获取车内人员信息并根据车内人员信息确定待开启车门。
[0089]
相应的,步骤s130中,根据所述开门请求以及所述车门延迟开启时间控制所述车门包括:根据所述开门请求以及所述车门延迟开启时间控制待开启车门。
[0090]
有时车内并没有坐满乘客,亦或者,仅有部分车内乘客具有下车开门下车意图,因此不必打开所有车门。本公开实施例中可以获取车内人员信息,根据车内人员信息确定开启哪些车门(即,待开启车门),在后续控制过程中,仅可以根据开门请求以及所述车门延迟开启时间仅控制待开启车门,无需控制所有车门开启。
[0091]
可选的,可以先获取车内图像信息和/或座椅上的重量信息,根据车内图像信息和/或座椅上的重量信息确定车内人员信息。例如通过车内摄像头获取车内图像信息,根据车内图像信息分析哪个车门处的乘客具有下车开门意图。例如车内人员的起身、转身、解开
安全带等信息。或者通过在车内座椅上设置压力传感器,通过压力传感器检测座椅上的重量信息,以此判断车内人员的开门下车意图,进而确定待开启车门。本公开实施例可以根据车内人员信息确定待开启车门,从而乘车人员的真实意图开启对应的车门。
[0092]
图2为本公开实施例提供的又一种车门控制方法的流程示意图。如图2所示,在一些实施例中,可选的,在获取外部障碍物速度、外部障碍物与本车的距离、以及开门请求之前还包括:
[0093]
s101、获取本车车速。
[0094]
s102、判断本车车速是否小于第二阈值。
[0095]
在本车车速小于第二阈值时,触发步骤s110获取外部障碍物速度、外部障碍物与本车的距离、以及开门请求的操作。
[0096]
本车车速的监测可以通过车辆can总线定期采集。第二阈值大于零。该第二阈值的具体数值,在本实施例中不进行特别限定,可以根据实际的需求来设定。例如,在实际应用中,可以将第二阈值设置为一个较小的值,从而在车速低于该第二阈值时才会触发步骤s110获取外部障碍物速度、外部障碍物与本车的距离、以及开门请求的操作。而本车车速大于该第二阈值时,车门仍被锁,乘客不可下车。若本车车速大于第二阈值,说明本车车速较快,不适宜车门开启进行乘客的上下车。因此,本公开实施例在本车车速小于第二阈值时,认为车辆已减速准备停车,此时触发步骤s110获取外部障碍物速度、外部障碍物与本车的距离、以及开门请求的操作,对本车周边环境进行监测,可以提高车辆的安全性能。
[0097]
本发明还提供了获取外部障碍物速度、外部障碍物与本车的距离、获取开门请求、以及获取车内人员信息并根据车内人员信息确定待开启车门操作的几种执行顺序实施例,下面结合示例性附图进行详细说明。
[0098]
可选的,在获取外部障碍物速度以及外部障碍物与本车的距离之时,获取车内人员信息并根据车内人员信息确定待开启车门;和/或,获取开门请求。图3为本公开实施例提供的又一种车门控制方法的流程示意图。如图3所示,示例性的设置步骤s111、s112、s113可以并行执行。其中,s111、s112、s113如下:
[0099]
s111、获取外部障碍物速度以及外部障碍物与本车的距离。
[0100]
s112、获取开门请求。
[0101]
s113、获取车内人员信息并根据车内人员信息确定待开启车门。
[0102]
在步骤s111在获取外部障碍物速度以及外部障碍物与本车的距离后,执行步骤120根据所述外部障碍物速度、所述外部障碍物与本车的距离以及车门延迟开启时间模型确定车门延迟开启时间,然后执行步骤130根据所述开门请求以及所述车门延迟开启时间控制待开启车门。
[0103]
本公开实施例通过设置步骤s111、s112、s113同时执行,可以缩短车门控制逻辑计算的时间,使车门控制响应更加迅速,还可以减小运行负载。
[0104]
可选的,在获取开门请求之后,获取外部障碍物速度以及外部障碍物与本车的距离,和/或,获取车内人员信息并根据车内人员信息确定待开启车门。
[0105]
图4为本公开实施例提供的又一种车门控制方法的流程示意图。如图4所示,在s112获取开门请求之后,执行s111获取外部障碍物速度以及外部障碍物与本车的距离以及s113获取车内人员信息并根据车内人员信息确定待开启车门。
[0106]
本公开实施例在获取开门请求后,再获取外部障碍物速度以及外部障碍物与本车的距离,以及获取车内人员信息并根据车内人员信息确定待开启车门。这样设置可以避免车辆持续进行外部障碍物速度以及外部障碍物与本车的距离的监测,以及车内人员的监测,仅在获取开门请求后再进行获取外部障碍物速度以及外部障碍物与本车的距离、获取车内人员信息并根据车内人员信息确定待开启车门等操作,因此还可以降低功耗。此外,在步骤s112获取开门请求后,执行步骤s113获取车内人员信息并根据车内人员信息确定待开启车门。还可以根据开门请求以及车门延迟开启时间仅控制待开启车门,无需控制所有车门。
[0107]
可选的,在获取开门请求之后,获取外部障碍物速度以及外部障碍物与本车的距离之前,获取车内人员信息并根据车内人员信息确定待开启车门。
[0108]
相应的,获取外部障碍物速度以及外部障碍物与本车的距离,包括:获取待开启车门对应的外部障碍物速度以及外部障碍物与本车的距离。
[0109]
图5为本公开实施例提供的又一种车门控制方法的流程示意图。参见图5,在步骤s112获取开门请求后,执行步骤s113获取车内人员信息并根据车内人员信息确定待开启车门。然后再执行步骤s111获取待开启车门对应的外部障碍物速度以及外部障碍物与本车的距离。这样设置可以在获取开门请求后,触发获取车内人员信息,从而确定待开启车门。例如4个车门中,仅有2个车门为待开启车门,那么后续步骤s111中,可以仅获取待开启车门对应的外部障碍物速度以及外部障碍物与本车的距离。这样可以避免对无需开启的车门也进行外部障碍物速度以及外部障碍物与本车的距离的检测。
[0110]
在一些实施例中,可选的,在根据所述开门请求以及所述车门延迟开启时间控制所述车门之时,还包括:
[0111]
若车门延迟开启时间大于第三阈值,进行语音提示。
[0112]
若车门延迟开启时间过长,会导致乘客发出开门指令后长时间无响应。该种情况有可能使乘客无法分辨是车门延时开启还是车门损坏。因此,本公开实施例在车门延迟开启时间大于第三阈值时,进行语音提示,例如语音输出“主人请小心,等待2分钟”。第三阈值的具体数值可以在线标定,本公开实施例对此不作限定。在一些实施例中,还可以设置第三阈值等于零,即只要车门延迟开启时间大于零,就进行语音提示,以便乘客知晓等待时间。
[0113]
图6为本公开实施例提供的一种车门控制逻辑原理图。如图6所示,本公开实施例中的车门控制方法可以通过afdc(adaptive fuzzy logical open door controller)智能模糊逻辑开门控制器执行。afdc可以作为整车的一个电子控制单元ecu的节点,实现智能开门算法,性能稳定,安全可靠。
[0114]
afdc分为监测模块、逻辑模块和执行模块三大模块。其中,监测模块是通过周期监测本车车速、开门请求(例如整车开门触摸或按键开关信号、整车开门语音信号)、外部障碍物速度、外部障碍物与本车的距离、以及车内人员信息等信号,输出给afdc的逻辑模块和执行模块。
[0115]
afdc的逻辑模块包括运算单元、afdc控制单元和pwm门开控制信号输出单元。运算单元根据外部障碍物速度计算获得相邻两采集时刻的外部障碍物加速度a,并向控制单元输出外部障碍物与本车的距离p,以及相邻两采集时刻的外部障碍物加速度a。控制单元根据外部障碍物与本车的距离p、相邻两采集时刻的外部障碍物加速度a、以及车门延迟开启
时间模型输出车门延迟开启时间d,门开控制信号输出单元根据开门请求、车内人员监测的生成结果(例如根据车内人员信息确定待开启车门)、车门延迟开启时间d生成pwm门开控制信号。
[0116]
afdc控制单元有两个输入量,一个是外部障碍物与本车的距离p,另一个是相邻两采集时刻的外部障碍物加速度a,输出控制量为车门延迟开启时间d。外部障碍物与本车的距离越大,车门延迟开启时间越大;相邻两采集时刻的外部障碍物加速度越大,车门延迟开启时间越小。根据此原则,进行模糊化处理,定义afdc控制单元的输入输出量的模糊集及其论域,本发明采用的afdc控制单元输入量的值,分别经过相应的量化因子量化后映射到对应的模糊集合论域p和a,分别定义:
[0117]
p=﹛sss,ss,s,ms,bs,sb,sb,b,mb﹜;
[0118]
a=﹛nb,nm,ns,z,ps,pm,pb﹜
[0119]
d={o,sso,so,mso,bso,sbo,bo,mbo,bbo}
[0120]
输出变量d的子集如上,也可以进行软件标定。根据上述理论制作;例如表1所示的映射表。最后根据映射表进行解模糊,输出车门延迟开启时间d。
[0121]
afdc的执行模块包括语音输出单元和afdc门开执行器。afdc的执行模块的输入量包括整车开门触摸信号、按键开关信号、整车开门语音信号,这三个信号通过中断触发,当接收到中断信号后,同时参考车内人员信息,包括左前一、右前一、左后二、右后二等座椅信号,当输出车门延迟开启时间d为表1中的o时,门开执行器进行相应车门的门开动作;当输出车门延迟开启时间d不是表1中的o,即还处于sso,so,mso,bso,sbo,bo,mbo,bbo等状态时,门开执行器不动作,语音输出单元输出“主人请小心,等x分钟”等提示信息。其中x为大于零的正数。直到车门延迟开启时间d为表1中的o时,门开执行器执行相应车门的门开动作。
[0122]
如上文所述的各个单元和部件可以使用以下中的任何一个或多个来相互通信:总线、网络和其它有线或无线互连件。示例包括i2c、spi、ps/2、通用串行总线(usb)、蓝牙、rf以及irda。
[0123]
本公开实施例还提供一种车门控制装置,图7为本公开实施例提供的一种车门控制装置的结构框图。如图7所示,包括:监测模块11、逻辑模块12,以及执行模块13。
[0124]
其中,监测模块11用于获取外部障碍物速度、外部障碍物与本车的距离、以及开门请求。逻辑模块12用于根据外部障碍物速度、外部障碍物与本车的距离、以及车门延迟开启时间模型确定车门延迟开启时间。执行模块13用于根据所述开门请求以及所述车门延迟开启时间控制车门。
[0125]
本公开实施例通过实时采集外部障碍物速度、外部障碍物与本车的距离、开门请求,并根据预先设置的车门延迟开启时间模型可以准确确定车门延迟开启时间,待逐渐靠近的车辆或者行人通过后再控制车门的开启,从而可以避免车门开启导致的碰撞事故。
[0126]
可选的,逻辑模块12还用于若外部障碍物与本车的距离大于第一阈值,确定车门延迟开启时间为零。
[0127]
可选的,逻辑模块12还用于根据外部障碍物速度确定相邻两采集时刻的外部障碍物加速度;根据外部障碍物与本车的距离、相邻两采集时刻的外部障碍物加速度,以及车门延迟开启时间模型确定车门延迟开启时间。
[0128]
可选的,车门控制装置还包括模型建立模块,用于建立车门延迟开启时间模型;
[0129]
其中,车门延迟开启时间模型包括外部障碍物与本车的距离、相邻两采集时刻的外部障碍物加速度与车门延迟开启时间的映射表;外部障碍物与本车的距离越大,车门延迟开启时间越大;相邻两采集时刻的外部障碍物加速度越大,车门延迟开启时间越小。
[0130]
可选的,映射表中包括外部障碍物与本车的距离、相邻两采集时刻的外部障碍物加速度,以及车门延迟开启时间;外部障碍物与本车的距离以及相邻两采集时刻的外部障碍物加速度均划分为多个范围区间。
[0131]
可选的,车门控制装置还包括模型建立模块,用于采用机器学习方法,根据历史外部障碍物与本车的距离数据、历史相邻两采集时刻的外部障碍物加速度数据,以及历史车门延迟开启时间数据训练得到车门延迟开启时间模型。
[0132]
可选的,监测模块11还用于获取车内人员信息并根据车内人员信息确定待开启车门。相应的,执行模块13用于根据开门请求以及车门延迟开启时间控制待开启车门。
[0133]
可选的,监测模块11具体用于获取车内图像信息和/或座椅上的重量信息;根据车内图像信息和/或座椅上的重量信息确定车内人员信息;根据车内人员信息确定待开启车门。
[0134]
可选的,监测模块11还用于在获取外部障碍物速度、外部障碍物与本车的距离、以及开门请求之前,获取本车车速,在本车车速小于第二阈值时,触发获取外部障碍物速度、外部障碍物与本车的距离、以及开门请求的操作。
[0135]
可选的,车门控制装置还包括语音提示模块,用于在车门延迟开启时间大于第三阈值时,进行语音提示。
[0136]
关于上述实施例中的装置,其中各个模块执行操作的具体方式已经在有关该方法的实施例中进行了详细描述,此处将不做详细阐述说明。
[0137]
在上述各实施例中,可以全部或部分地通过软件、硬件、固件或者其任意组合来实现。当使用软件实现时,可以全部或部分地以计算机程序产品的形式实现。所述计算机程序产品包括一个或多个计算机指令。在计算机上加载和执行所述计算机程序指令时,全部或部分地产生按照本技术实施例所述的流程或功能。
[0138]
图8为本公开实施例提供的一种电子设备的框图。如图8所示,该电子设备可以包括:处理器21,存储器22。此外,可选的,该电子设备还可以包括多媒体组件23,输入/输出(i/o)接口24,以及通信组件25中的一者或多者。
[0139]
其中,处理器21用于控制该电子设备的整体操作,以完成上述的车门控制方法中的全部或部分步骤。存储器22用于存储各种类型的数据以支持在该电子设备的操作,这些数据例如可以包括用于在该电子设备上操作的任何应用程序或方法的指令,以及应用程序相关的数据等。该存储器22可以由任何类型的易失性或非易失性存储设备或者它们的组合实现,例如静态随机存取存储器(static random access memory,简称sram),电可擦除可编程只读存储器(electrically erasable programmable read-only memory,简称eeprom),可擦除可编程只读存储器(erasable programmable read-only memory,简称eprom),可编程只读存储器(programmable read-only memory,简称prom),只读存储器(read-only memory,简称rom),磁存储器,快闪存储器,磁盘或光盘。多媒体组件23可以包括屏幕和音频组件。其中屏幕例如可以是触摸屏,音频组件用于输出和/或输入音频信号。
例如,音频组件可以包括一个麦克风,麦克风用于接收外部音频信号。所接收的音频信号可以被进一步存储在存储器22或通过通信组件25发送。音频组件还包括至少一个扬声器,用于输出音频信号。i/o接口24为处理器21和其他接口模块之间提供接口。这些按钮可以是虚拟按钮或者实体按钮。通信组件25用于该电子设备与其他设备之间进行有线或无线通信。无线通信,例如wi-fi,蓝牙,近场通信(near fieldcommunication,简称nfc),2g、3g、4g或5g,或它们中的一种或几种的组合,因此相应的该通信组件25可以包括:wi-fi模块,蓝牙模块,nfc模块。
[0140]
在一示例性实施例中,电子设备可以被一个或多个应用专用集成电路(application specific integrated circuit,简称asic)、数字信号处理器(digitalsignal processor,简称dsp)、数字信号处理设备(digital signal processing device,简称dspd)、可编程逻辑器件(programmable logic device,简称pld)、现场可编程门阵列(field programmable gate array,简称fpga)、控制器、微控制器、微处理器或其他电子元件实现,用于执行上述的确定车门控制方法。
[0141]
在另一示例性实施例中,还提供了一种包括程序指令的计算机可读存储介质,该程序指令被处理器执行时实现上述的确定车门控制方法的步骤。例如,该计算机可读存储介质可以为上述包括程序指令的存储器22,上述程序指令可由电子设备的处理器21执行以完成上述的确定车门控制方法。
[0142]
需要说明的是,对于前述的各方法实施例,为了简单描述,故将其都表述为一系列的动作组合,但是本领域技术人员能够理解,本公开实施例并不受所描述的动作顺序的限制,因为依据本公开实施例,某些步骤可以采用其他顺序或者同时进行。另外,本领域技术人员能够理解,说明书中所描述的实施例均属于可选实施例。
[0143]
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。
[0144]
本领域的技术人员能够理解,尽管在此所述的一些实施例包括其它实施例中所包括的某些特征而不是其它特征,但是不同实施例的特征的组合意味着处于本公开的范围之内并且形成不同的实施例。
[0145]
本领域的技术人员能够理解,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其他实施例的相关描述。
[0146]
虽然结合附图描述了本公开的实施方式,但是本领域技术人员可以在不脱离本公开的精神和范围的情况下做出各种修改和变型,这样的修改和变型均落入由所附权利要求所限定的范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。