1.本发明涉及光学检测技术领域,具体涉及一种非接触测量不透光光学平面零件平行和垂直的方法。
背景技术:
2.不透光的光学平面零件在对光学表面检测时,根据零件抛光面的位置,具有两种检测参数,一是针对零件的两个抛光表面为平行布置的情况,需要进行平行度测量,还有一个是针对零件的两个抛光表面为垂直布置的情况,需要进行垂直度测量,通常现有的检测方法采用紧密仪器测量,检测精度高,但是价格昂贵。
3.也有采用自准直仪进行测量的,使用成本得到控制,不透光的光学平面零件在使用自准直仪测量平行时,零件的一个表面贴在光学平晶上,另一个表面向上,自准直仪垂直于光学平晶,自准直仪发出的平行光同时照射在光学平晶和零件表面上,反射的光回到自准直仪内成像,根据光学平晶和零件表面反射像分开的距离测量零件的平行误差。
4.这种测量的缺陷是:一是零件与光学平晶贴合时存在空气间隙或有杂质,出现放置误差,测量的可靠性不高;再是零件表面与光学平晶接触,会使零件表面损伤。
5.测量垂直度时,将标准直角放在光学平晶上,再将零件的一个直角面放在光学平晶上,用自准直仪检测两个反射像上下偏差的距离,对应的就是零件的垂直度。这种测量的缺陷也是存在放置误差和损伤零件表面。
6.因此,亟需一种测量方法,以精准对光学平面零件的光学表面进行检测。
技术实现要素:
7.本发明要解决上述技术问题并提供一种非接触测量不透光光学平面零件平行和垂直的方法,不受放置误差影响,并且对零件表面没有损伤。
8.为了解决上述技术问题,本发明提供了一种非接触测量不透光光学平面零件平行的方法,采用旋转平台、自准直仪和基准光学四方体测量零件的两个平行光学表面的平行度,所述旋转平台能够调整水平度和自转,所述基准光学四方体摆放在旋转平台表面且具有四个垂直的基准侧面,所述自准直仪水平设置在基准光学四方体一侧;
9.测量时,先对基准光学四方体进行校准,通过对旋转平台进行调整水平度,使得在自准直仪目镜视场内,四个基准面在上下方向上的刻度位置一致且位于目镜视场中部;
10.将待测量零件放在基准光学四方体上,将待测量零件的第一抛光面与同一侧的基准侧面摆放方向一致,在自准直仪的目镜视场中同时看到第一抛光面的第一测量反射像以及基准侧面的第一基准反射像,调整待测量零件的位置,使第一测量反射像接近第一基准反射像,记录此时第一测量反射像与第一基准反射像之间的角度偏差,即水平方向偏差为θx1,上下方向偏差为θy1;
11.转动旋转平台,自准直仪对待测量零件的第二抛光面进行测量,在自准直仪的目镜视场中同时看到第二抛光面的第二测量反射像以及同一侧的基准侧面的第二基准反射
像,第二测量反射像与第二基准反射像位于目镜中部,记录此时第二测量反射像与第二基准反射像之间的角度偏差,即水平方向偏差为θx2,上下方向偏差为θy2;
12.进行平行差的计算:水平方向的平行差θx=|θx1 θx2|,上下方向的平行差θy=|θy1 θy2|,最后对带测量零件的总平行差进行计算:
[0013][0014]
根据对带测量零件的总平行差判断零件的质量。
[0015]
进一步地,在水平方向偏差中,第一测量反射像和第二测量反射像在左为负,在右为正;在上下方向偏差中,第一测量反射像和第二测量反射像在下为负,在上为正。
[0016]
进一步地,旋转平台通过转轴组件与水平调节平台连接,所述水平调节平台下方设置有底板,所述水平调节平台与底板之间设置有三个水平调节螺钉,所述底板底部设置有三个底脚。
[0017]
进一步地,所述基准光学四方体粘结固定在旋转平台表面。
[0018]
进一步地,在基准光学四方体表面且靠近四个侧边的位置上设置区分标识。
[0019]
一种非接触测量不透光光学平面零件垂直的方法,采用旋转平台、自准直仪和基准光学四方体测量零件的两个垂直光学表面的平行度,所述旋转平台能够调整水平度和自转,所述基准光学四方体摆放在旋转平台表面且具有四个垂直的基准侧面,所述自准直仪水平设置在基准光学四方体一侧;
[0020]
测量时,先对基准光学四方体进行校准,通过对旋转平台进行调整水平度,使得在自准直仪目镜视场内,四个基准面在上下方向上的刻度位置一致且位于目镜视场中部;
[0021]
将待测量零件放在基准光学四方体上,将待测量零件的第一抛光面与同一侧的基准侧面摆放方向一致,在自准直仪的目镜视场中同时看到第一抛光面的第一测量反射像以及基准侧面的第一基准反射像,调整待测量零件的位置,使第一测量反射像接近第一基准反射像,记录此时第一测量反射像与第一基准反射像之间的角度偏差即水平方向偏差为ax1;
[0022]
转动旋转平台,自准直仪对待测量零件的第二抛光面进行测量,在自准直仪的目镜视场中同时看到第二抛光面的第二测量反射像以及同一侧的基准侧面的第二基准反射像,第二测量反射像与第二基准反射像位于目镜中部,记录此时第二测量反射像与第二基准反射像之间的角度偏差,即水平方向偏差为ax2;
[0023]
随后待测量零件上相邻两个抛光面的夹角a=90
°
ax1-ax2;
[0024]
根据对带测量零件的夹角角度判断零件的质量。
[0025]
进一步地,在水平方向偏差中,第一测量反射像和第二测量反射像的反射像在左为负,在右为正。
[0026]
进一步地,旋转平台通过转轴组件与水平调节平台连接,所述水平调节平台下方设置有底板,所述水平调节平台与底板之间设置有三个水平调节螺钉,所述底板底部设置有三个底脚。
[0027]
进一步地,所述基准光学四方体粘结固定在旋转平台表面。
[0028]
进一步地,在基准光学四方体表面且靠近四个侧边的位置上设置区分标识。
[0029]
本发明的有益效果:
[0030]
1、采用本发明的方法进行测量时,带测量零件的抛光表面不需要与其它物体接触,实现了无接触测量的效果,不会对零件表面造成损伤。
[0031]
2、由于采用基准光学四方体作为参考,能够有效的修正零件的放置误差,可以精确的测量零件的平行度和垂直度。
[0032]
3、即使零件的摆放面是光学面,也可以在零件底部与基准光学四方体之间加一层保护膜,防止光学面出现损伤,同时不影响测量精度。
附图说明
[0033]
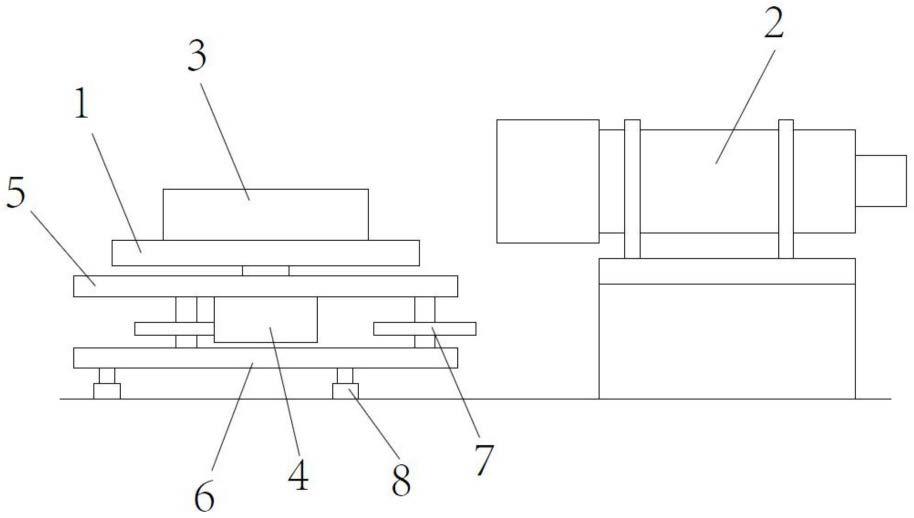
图1是本发明的检测装置结构示意图;
[0034]
图2是本发明图1中部分结构截面示意图;
[0035]
图3是本发明进行平行度测量时的示意图;
[0036]
图4是本发明图3中测量时的部分结构俯视示意图;
[0037]
图5是本发明进行平行度测量时且测量第二个面的示意图;
[0038]
图6是本发明图5中测量时的部分结构俯视示意图;
[0039]
图7是本发明进行垂直度测量时的示意图;
[0040]
图8是本发明图7中测量时的部分结构俯视示意图;
[0041]
图9是本发明进行垂直度测量时且测量相邻第二个面的示意图;
[0042]
图10是本发明图9中测量时的部分结构俯视示意图。
具体实施方式
[0043]
下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
[0044]
参照图1和图2所示,本发明的一种非接触测量不透光光学平面零件平行的方法的一实施例,采用旋转平台1、自准直仪2和基准光学四方体3测量零件两个平行的抛光面的平行度,旋转平台能够调整水平度和自转,具体的,旋转平台通过转轴组件4与水平调节平台5连接,水平调节平台下方设置有底板6,水平调节平台与底板之间设置有三个水平调节螺钉7,底板底部设置有三个底脚8,三个底脚用于稳定支撑底板,水平调节板则通过三个水平调节螺钉在底板上调节水平度,在调节的同时,由于旋转平台通过转轴组件与水平调节平台连接,因此旋转平台与水平调节平台同步动作,并且由于转轴组件的设置,旋转平台还能够自转,在不同抛光面测量时进行转动调节,操作方便,基准光学四方体摆放在旋转平台表面,自准直仪水平设置在基准光学四方体一侧,自准直仪中心线在基准光学四方体的上表面或稍高;
[0045]
测量时,自准直仪平放,对准基准光学四方体的s1面,自准直仪中心线在光学四方体的上表面或稍高,s1面的基准反射像上下方向接近视场中心,即位于目镜视场中部,转动旋转平台分别观察s1面、s2面、s3面和s4面的基准反射像,4个基准反射像的上下方向刻度应是一致的,如果有偏差,通过调整水平调节螺钉使上下方向刻度一致。
[0046]
参照图3和图4所示,随后将待测量零件放在基准光学四方体上,将待测量零件的第一抛光面与同一侧的基准侧面摆放方向一致,即表面m1与s1面方向一致,这时在自准直仪中可以同时看到m1面和s1面的反射像,即第一测量反射像与第一基准反射像,调整m1面
的方向,使m1面的第一测量反射像接近s1面的第一基准反射像,具体的,接近的间距控制在两分以内,保证测量精度,记录这时两个像之间的角度偏差,其中水平方向偏差记录为θx1,m1的第一测量反射像在第一基准反射像的左边为负,在右边为正;上下方向偏差记录为θy1,m1的第一测量反射像在第一基准反射像的下边为负,在上为正;
[0047]
参照图5和图6所示,转动旋转平台,自准直仪对待测量零件的第二抛光面进行测量,在自准直仪的目镜视场中同时看到第二抛光面的第二测量反射像以及同一侧的基准侧面的第二基准反射像,即测量m2和s3面的反射像,参照同时看到m2面和s3面的反射像,记录这时两个像之间的角度偏差,水平方向偏差为θx2,m2的第二测量反射像在第二基准反射像的左边为负,在右边为正,上下方向偏差为θy2,m2的第二测量反射像在第二基准反射像的下边为负,在上为正;
[0048]
进行平行差的计算:水平方向的平行差θx=|θx1 θx2|,相对与基准反射像,对应的测量反射像位于右侧表面反射时,则零件的左侧比右侧厚,上下方向的平行差θy=|θy1 θy2|,相对与基准反射像,对应的测量反射像向上侧表面反射时,零件的下侧比上侧厚,最后对带测量零件的总平行差进行计算:
[0049][0050]
根据对带测量零件的总平行差判断零件的质量,当总平行差位于标准值范围内时,表明零件的平行度合格,反之不合格。
[0051]
在上述机构中,旋转平台表面还可以设置限位凹槽,基准光学四方体摆放在限位凹槽内,减少基准光学四方体在转动或者调节水平过程中发生移动,并且在限位的同时也便于更换。还在基准光学四方体表面且靠近四个侧边的位置上设置区分标识,便于测量过程中对第一抛光面和第二抛光面的快速辨识。
[0052]
在一实施例中,本发明还提供一种采用旋转平台、自准直仪和基准光学四方体测量零件两个抛光面相邻布置时的垂直度的方法,采用与上述实施例一致的设备,即在测量时,直接将零件放置在基准光学四方体上,无需增加垂直三角块等额外的辅助部件。
[0053]
测量时,自准直仪平放,对准基准光学四方体的s1面,自准直仪中心线在光学四方体的上表面或稍高,s1面的基准反射像上下方向接近视场中心,即位于目镜视场中部,转动旋转平台分别观察s1面、s2面、s3面和s4面的基准反射像,4个基准反射像的上下方向刻度应是一致的,如果有偏差,通过调整水平调节螺钉使上下方向刻度一致。
[0054]
参照图7和图8所示,随后将待测量零件放在基准光学四方体上,将待测量零件的第一抛光面与同一侧的基准侧面摆放方向一致,即表面m1与s1面方向一致,这时在自准直仪中可以同时看到m1面和s1面的反射像,即第一测量反射像与第一基准反射像,调整m1面的方向,使m1面的第一测量反射像接近s1面的第一基准反射像,具体的,接近的间距控制在五分以内,保证测量精度,记录这时两个像之间的角度偏差,其中水平方向偏差记录为ax1,m1的第一测量反射像在第一基准反射像的左边为负,在右边为正;
[0055]
参照图9和图10所示,转动旋转平台,自准直仪对待测量零件的第二抛光面进行测量,在自准直仪的目镜视场中同时看到第二抛光面的第二测量反射像以及同一侧的基准侧面的第二基准反射像,即测量m2和s2面的反射像,参照同时看到m2面和s2面的反射像,记录这时两个像之间的角度偏差,水平方向偏差为ax2,m2的第二测量反射像在第二基准反射像
的左边为负,在右边为正;
[0056]
随后待测量零件上相邻两个抛光面的夹角a=90
°
ax1-ax2;
[0057]
根据对带测量零件的夹角角度判断零件的质量,当夹角角度位于标准值范围内时,表明零件的平行度合格,反之不合格。
[0058]
由于m1面和m2面与准基准光学四方体上表面存在垂直误差,使m1面和m2面角度的测量值与实际角度存在差异。但这个偏异很小,一般情况下反射像上下偏差在10分的情况下,引起的垂直度测量误差在2分以内。一般光学零件加工的侧面垂直度在5分以内,因此可以不考虑垂直度测量面与长方体上表面垂直问题。
[0059]
本发明采用价格低廉的装置可以对不透光零件进行平行度和垂直度的测量,成本不足进口测角仪的3%、国产测角仪的1%,甚至更低,并且是非接触测量方式,杜绝了对抛光后的零件表面造成损伤。
[0060]
以上实施方式仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施方式对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施方式所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施方式技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。