技术特征:
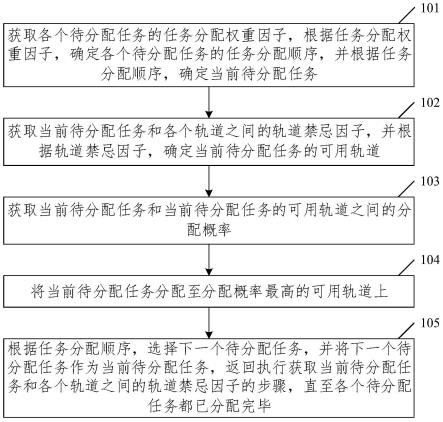
1.一种执行器受限航天器交会系统的动态触发有限时间控制方法,其特征在于所述方法包括如下步骤:步骤一:建立执行器受限航天器交会控制系统的轨道动力学模型,并得到相应的状态空间方程;步骤二:建立参量lyapunov方程和动态事件触发机制,通过利用参量lyapunov方程的独有性质,设计执行器受限情形下的基于动态事件触发机制的线性反馈控制律,即设计执行器受限航天器交会控制系统的基于动态事件触发机制的状态反馈控制器,保证在节省通信资源的情况下追踪航天器和目标航天器在有限时间t0内完成交会任务。2.根据权利要求1所述的执行器受限航天器交会系统的动态触发有限时间控制方法,其特征在于所述步骤一的具体步骤如下:步骤一一、建立航天器交会控制系统的数学模型:目标航天器和追赶航天器的非线性相对运动方程为:其中,r=r0 x1,r0是目标航天器的轨道半径;引入目标航天器轨道坐标系o-x1x2x3,其原点o位于目标航天器的质心,x1轴沿着轨道半径方向,x2轴沿着目标航天器的飞行方向,x3轴指向轨道平面外且与x1轴和x2轴一起构成右手坐标系,是在追赶航天器推力器上的归一化了的加速度矢量,a1,a2,a3为推力器在x1轴、x2轴和x3轴方向上产生的加速度,u为归一化输入向量,其中u1,u2,u3分别是推力器在x1轴、x2轴和x3轴方向上产生的归一化加速度,表示推力器在三个方向上提供的最大加速度,x1,x2,x3是定义坐标原点在目标航天器质心上右手坐标系下,追赶航天器相对目标航天器的位置,η=gm是引力参数,m是星体的质量,g是引力常数,目标航天器的轨道速率为ω=η
1/2
r
3/2
;步骤一二、当推力器在三个方向上提供的最大加速度相同时,定义是状态向量,航天器交会控制系统的状态空间方程为:公式(2)即为航天器交会控制系统的状态空间方程,其中:a是航天器交会控制系统的状态矩阵,b为航天器交会控制系统的输入矩阵;其中sign是数学中的符号函数,min{1,||u||}表示取1和||u||的最小值,3.根据权利要求1所述的执行器受限航天器交会系统的动态触发有限时间控制方法,其特征在于所述航天器交会控制系统的状态矩阵a和输入矩阵b为:
其中,i3表示3阶单位矩阵。4.根据权利要求1所述的执行器受限航天器交会系统的动态触发有限时间控制方法,其特征在于所述步骤具体步骤如下:步骤二一、构建参量lyapunov方程:a
t
p(γ) p(γ)a-p(γ)bb
t
p(γ) γp(γ)=0
ꢀꢀꢀꢀ
(3);其中,γ是方程(3)中的时变参数,其特征在于所述γ由它的导数所决定,这里θ为接下来设计的一个动态变量;γ的初值γ0>0为待设计的常数;α为待设计的参数;为矩阵p(γ)对γ的导数;δ
c
=δ
c
(γ0)≥1是有关于γ0的常数,等于:其中,n为系统方程(2)的阶数;λ
max
(u(γ)w-1
(γ))表示矩阵u(γ)w-1
(γ)的最大特征值;w-1
(γ)=p(γ),u(γ)是以下公式(6)的lyapunov方程的唯一正定解;其中,i6表示6阶单位矩阵;标量δ
c
(γ0)通过离散γ得到;其中,γ
b
=γ0 bδγ,δγ是一个充分小的正数,称作步长,q是一个充分大的数。公式(3)所示的参量lyapunov方程存在唯一正定解p(γ)且p(γ)具有以下性质:性质1:pbb
t
p≤nγp
ꢀꢀꢀꢀ
(8);性质2:其中,π
γ
=2n2γ
2-nγ
2-2tr(a2)随着γ的增大而增大,其中tr(a2)表示矩阵a2的迹;性质3:当γ趋于正无穷时,p(γ)也趋于正无穷;
性质4:满足且与p(γ)的关系为:性质5:让则对于任意时间t大于等于时间t
i
有:p
e
bb
t
p
e
≤n(γ(t)-γ(t
i
))p
e
≤nγ(t)p
e
≤nγ(t)p(γ(t))
ꢀꢀꢀꢀ
(11);这里的γ(t)和γ(t
i
)代表参数γ在时间t和t
i
的值,p(γ(t))和p(γ(t
i
)分别代表方程(3)在时间t和t
i
处的解;由于需要频繁地利用跟时间t和时间t
i
有关的变量,因此定义如下命名规则:γ=γ(t),p=p(γ(t)),γ
i
=γ(t
i
),其中i∈n的初始值为0,t0=0,n代表非负整数;步骤二二、构建物理可实现动态事件触发有限时间反馈控制器:步骤二二一、构建一个动态变量:其中这里e为测量误差,定义如下:这里的x
i
=x(t
i
)代表系统状态在时间t
i
处的值,与此同时,定义:步骤二二二、定义基于式(3)的动态事件触发控制器:这里的t
i
由以下动态事件触发机制决定:其中,inf代表满足特定条件的值的下界;步骤二二三、为了设计物理可实现的控制器,给出一种γ的设计方法:其中,为γ的导数,γ
*
是一个足够大的常数,是在足够接近于t0的时间t
*
(t
*
<t0)时刻γ的值;另外,当t>t
*
时,由于因此p
e
=0,且动态事件触发机制变为:这里的p
γ*
是方程(3)中当γ=γ
*
时的唯一正定解。
技术总结
本发明公开了一种执行器受限航天器交会系统的动态触发有限时间控制方法,所述方法包括如下步骤:步骤一:建立执行器受限航天器交会控制系统的轨道动力学模型,并得到相应的状态空间方程;步骤二:建立参量Lyapunov方程和动态事件触发机制,设计执行器受限情形下的基于动态事件触发机制的线性反馈控制律,保证在节省通信资源的情况下追踪航天器和目标航天器在有限时间T0内完成交会任务。本发明针对执行器受限的航天器交会控制系统,通过参量Lyapunov方程,设计基于动态事件触发机制的控制律,并保证在追踪航天器和目标航天器在有限时间T0内完成交会任务的同时,证明最小触发时间间隔的存在,也就是避免Zeno现象的发生。也就是避免Zeno现象的发生。也就是避免Zeno现象的发生。
技术研发人员:张凯 姜怀远 胡志坚 付金宇 李理
受保护的技术使用者:哈尔滨工业大学
技术研发日:2022.10.31
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。