1.本发明属于消防机械设备技术领域,特别涉及多自由度举高灭火巨型机器人。
背景技术:
2.目前的消防车云梯载人上升的高度只有几十米,对于高于100米的火场灭火比较困难,无法载人上升到这样的高度。
3.由于本设计所使用的多个支臂“之”形头尾铰接,可伸展可折叠形设计,如果使用传统的一根整水管从头到尾供水,支开和合上容易造成水管在转角的过度扭曲、折叠甚至折断扭断。
4.由于本机器人可以上升到很高,上方的支臂如果依然如同下方的支臂那样使用动力缸提供上升动力,动力缸需要的介质需要向上泵很高的高度,需要大扬程的泵来提供动力,没有用电提供动力那样对高度没有很多要求。
技术实现要素:
5.本发明的目的是提供多自由度举高灭火巨型机器人,可以调节多个自由度上升到很高的高度进行喷水灭火。
6.采用的技术方案是:多自由度举高灭火巨型机器人,包括车架、多个支臂、水管和喷枪头。其特征在于:多个空心的支臂成“之”字形头尾相连铰接:最底部的支臂头部通过轴和轴座铰接在车架上,最底部的支臂中部通过动力缸铰接在车架上。最底部上方的底部多个支臂通过各自下方的动力缸铰接在下方的支臂上。底部的支臂头尾端部之间通过旋转接头铰接。
7.上方的多个支臂通过头尾端部的关节和旋转接头铰接。
8.多个支臂内部有水管成“之”字形拐弯穿过多个支臂,在最上的支臂尾部设有喷枪头,水管出口连接喷枪头入口。
9.最下端水管进口连接水泵的出口。
10.所述的旋转接头结构可为:包括l形的转角管,转角管的固定端固定在一个支臂的一端,此支臂内此端的水管口与转角管的固定端固定密封连接。转角管的活动端伸出此支臂。
11.另一支臂内此端的水管口伸入转角管的活动端,此水管口设有水口凸缘。转角管的活动端内设有多圈凸起,相邻圈凸起之间设有旋转接头密封圈。水口凸缘设置在多圈凸起内侧。转角管的活动端伸入所述的另一支臂的支臂圆形凸管,转角管的活动端外壁和所述的支臂圆形凸管内壁之间设有轴承。
12.所述的关节结构可为:包括电机减速机、主动齿轮和从动齿轮。
13.支臂圆形凸管外设有从动齿轮。
14.另一个支臂上固定有电机减速机,电机减速机的输出轴设有主动齿轮。主动齿轮和从动齿轮啮合。
15.其优点在于:本发明的巨型灭火机器人,可以调整多个自由度,可以不需要载人上升到很高的高度(例如100米以上)就可以进行喷水灭火,解决了现有云梯载人的缺点,可以大范围拓展喷水救火的高度,可以绕开部分障碍物,保障人民生命财产的安全。旋转接头可以使水方便的过弯,供水更加顺利。使用关节提供转动动力减少高处的重量,直接使用电力,不需要使用动力缸的介质向更高处泵压。
附图说明
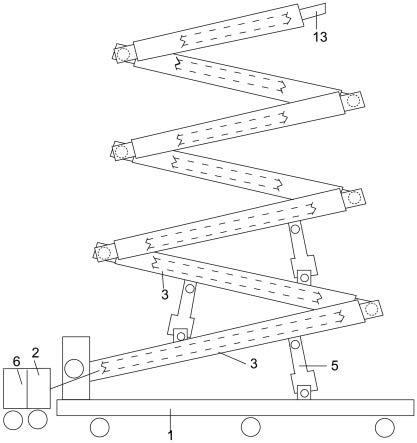
16.图1为机器人整体结构的主视图。
17.图2为多个支臂前后交替的侧视图。
18.图3为转角管的固定端位于右侧的一种结构示意图。
19.图4为转角管的固定端位于右侧的另一种结构示意图。
20.图5为转角管的固定端位于左侧的一种结构示意图。
21.图6为电机减速机和齿轮位于右侧的一种结构示意图。
22.图7为电机减速机和齿轮位于右侧的另一种结构示意图。
23.图8为电机减速机和齿轮位于左侧的一种结构示意图。
24.车架1、水泵2、支臂3、水口凸缘4、动力缸5、水箱6、转角管7、轴承8、电机减速机9、支臂圆形凸管10、从动齿轮11、主动齿轮12、喷枪头13、关节14、支座15、支撑管路16、旋转接头密封圈17。
具体实施方式
25.数字化多自由度举高灭火巨型机器人,包括车架1、多个支臂3、水管和喷枪头13。
26.车架1上支撑有多个空心支臂3。
27.多个空心的支臂3成“之”字形头尾相连铰接,最底部的支臂3通过动力缸5和轴座铰接在车架1上,最底部上方的底部多个支臂3通过各自下方的动力缸5铰接在下方的支臂3上。
28.底部的支臂3头尾端部之间通过旋转接头4铰接。
29.上方的多个支臂3通过头尾端部的关节14和旋转接头4铰接,由关节14内的动力装置带动向上升高。
30.关节14为伺服动力多自由度灭火巨型机器人关节。
31.多个支臂3内部有水管(可为硬质水管或者柔性水管配合使用,例如塑料水管、不锈钢水管或碳纤维水管)成“之”字形拐弯穿过,在最上的支臂3尾部设有喷枪头13,水管出口连接喷枪头13入口,从喷枪头13向外喷水。
32.具体结构为:位于下方的多个支臂3靠动力缸5向上推动延伸。
33.最下方为第一个的支臂3的头部通过轴和轴架铰接在车架1上。
34.第一个的支臂3的中部通过动力缸5(液压缸)铰接在车架1上。
35.第一个的支臂3的尾部通过旋转接头4连接上方第二个支臂3的头部。
36.上方第二个支臂3的尾部通过旋转接头4连接上方第三个支臂3的头部。
37.向上每个支臂3的尾部均通过旋转接头4连接上方支臂3的头部。
38.顺次头尾相连至最上的支臂3。
39.底部的多个支臂3的中部均通过动力缸5铰接在下方的支臂3延伸的支座15上。
40.多个动力缸5柱塞的伸出可以推动多个支臂3和内部的水管向上延伸送水。
41.本实施例中设置了三个支臂3和三个动力缸5设置在底部。
42.由于支臂3的支开和合上容易造成水管在转角的过度扭曲、折叠甚至折断扭断。本发明提供一种旋转接头(大通径、高压力旋转接头),l形的转角管7内圆形直径可以达到50 mm
ꢀ‑
80mm,压力可以承受10mpa的水压。内直径具体可为50 mm、60 mm或80mm。
43.旋转接头4的一种具体设置结构为:旋转接头4包括l形的转角管7,转角管7的固定端固定在下方的支臂3的一端,下方支臂3内此端的水管口与转角管7的固定端固定密封连接。
44.转角管7的活动端伸出下方支臂3。
45.上方的支臂3内此端的水管口伸入转角管7的活动端,此水管口设有水口凸缘4。转角管7的活动端内设有多圈凸起,相邻圈凸起之间设有旋转接头密封圈17。水口凸缘4设置在多圈凸起内侧。位于多圈凸起和多个旋转接头密封圈17的水管可还内衬一段支撑管路16(硬质管路,可为防水硬质管路,例如硬质塑料或者不锈钢等,加强柔性管路在此处的强度方便随动旋转)。(此处也可以采用其他机械领域已知的旋转密封的结构)。
46.转角管7的活动端伸入上方支臂3的支臂圆形凸管10,下方转角管7的活动端外壁和上方支臂圆形凸管10内壁之间设有轴承8。
47.旋转接头4的另一种具体设置结构为:上方支臂3内此端的水管口与转角管7的固定端固定密封连接。
48.转角管7的活动端伸出上方支臂3。
49.下方的支臂3内此端的水管口伸入转角管7的活动端,此水管口设有水口凸缘4。转角管7的活动端内设有多圈凸起,相邻圈凸起之间设有旋转接头密封圈17。水口凸缘4设置在多圈凸起内侧对水管边缘进行限位。
50.转角管7的活动端外壁伸入下方支臂3的支臂圆形凸管10,上方转角管7的活动端外壁和下方的支臂圆形凸管10内壁之间设有轴承8。
51.其工作原理为:水从下方的支臂3内的水管进入转角管7的固定端,转角管7的活动端,由于下方的支臂3尾部和上方的支臂3头部发生了相对转动,上方的水管向上旋转,上方的支臂3和转角管7的活动端在轴承8的支撑下配合转动,水可以经过转角管7顺利进入上方的水管,不会发生前述的过度扭曲、折叠甚至折断扭断的情况。进一步的,如果水管为柔性水管可以在多圈凸起和多个旋转接头密封圈17的水管内衬一段支撑管路16,方便在多个旋转接头密封圈17处的水管完成转动密封。如图3中所示箭头方向为水流拐弯。
52.或者如第二种结构,水从转角管7的活动端流向转角管7的固定端向上拐弯。
53.位于上方的多个支臂3头尾之间采用关节14连接转弯,关节14内采用伺服动力的电机减速机9带动转角转动的结构向上伸出。
54.关节14包括电机减速机9、主动齿轮12和从动齿轮11。
55.支臂圆形凸管10外设有从动齿轮11。
56.另一个支臂3上固定有电机减速机9,电机减速机9的输出轴设有主动齿轮12。主动齿轮12和从动齿轮11啮合。为了更加精准的控制齿轮的转动,电机减速机9可以采用谐波减速机。
57.当从动齿轮11设置在上方的支臂3上,则电机减速机9设置在下方的支臂3上。
58.当从动齿轮11设置在下方的支臂3上,则电机减速机9设置在上方的支臂3上。
59.其工作原理为:电机减速机9带动主动齿轮12,主动齿轮12带动从动齿轮11,进而带动上方的支臂3向上伸展。
60.多个支臂3里的每段水管通过转角的旋转接头4进行u形拐弯直到最上方的支臂3端部,最上方的支臂3端部设有喷枪头14,连接最后一端水管的出口可以向外喷水进行灭火。
61.最下端的支臂3里的水管进口连接水泵2的出口,水泵的出口连接水箱6供水口。
62.本实施例当中,上方由电机减速机9带动的支臂3为四个,底部的支臂为3个,整体为七自由度举高巨型灭火机器人。
63.进一步的,多个支臂3的设置为前后方向交替设置,这样的折叠方式在竖向方向更容易保持平衡。
64.水泵2和水箱6可以设置在车架1上或者设置在其他配套车辆上。
65.车架1有轮胎可自带驾驶室或者采用拖车拖拽。
66.动力缸5的柱塞伸出或者收缩带动底部的支臂3的上升或者折叠,液压动力大,适用于底部支撑。
67.上部关节14由电力带动打开或回缩。
68.单个支臂3长度可达到20米以上,多个支臂3伸展开可达到100米以上。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。