技术特征:
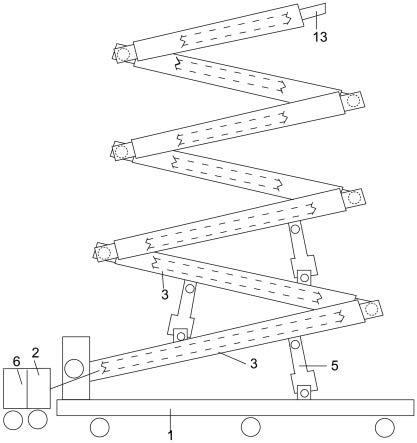
1.多自由度举高灭火巨型机器人,包括车架(1)、多个支臂(3)、水管和喷枪头(13);其特征在于:多个空心的支臂(3)成“之”字形头尾相连铰接:最底部的支臂(3)头部通过轴和轴座铰接在车架(1)上,最底部的支臂(3)中部通过动力缸(5)铰接在车架(1)上;最底部上方的底部多个支臂(3)通过各自下方的动力缸(5)铰接在下方的支臂(3)上;底部的支臂(3)头尾端部之间通过旋转接头(4)铰接;上方的多个支臂(3)通过头尾端部的关节(14)和旋转接头(4)铰接;多个支臂(3)内部有水管成“之”字形拐弯穿过多个支臂(3),在最上的支臂(3)尾部设有喷枪头(13),水管出口连接喷枪头(13)入口;最下端水管进口连接水泵(2)的出口。2.根据权利要求1所述的多自由度举高灭火巨型机器人,其特征在于:所述的旋转接头(4)包括l形的转角管(7),转角管(7)的固定端固定在一个支臂(3)的一端,此支臂(3)内此端的水管口与转角管(7)的固定端固定密封连接;转角管(7)的活动端伸出此支臂(3);另一支臂(3)内此端的水管口伸入转角管(7)的活动端,此水管口设有水口凸缘(4);转角管(7)的活动端内设有多圈凸起,相邻圈凸起之间设有旋转接头密封圈(17);水口凸缘(4)设置在多圈凸起内侧;转角管(7)的活动端伸入所述的另一支臂(3)的支臂圆形凸管(10),转角管(7)的活动端外壁和所述的支臂圆形凸管(10)内壁之间设有轴承(8)。3.根据权利要求2所述的多自由度举高灭火巨型机器人,其特征在于:所述的关节(14)包括电机减速机(9)、主动齿轮(12)和从动齿轮(11);支臂圆形凸管(10)外设有从动齿轮(11);另一个支臂(3)上固定有电机减速机(9),电机减速机(9)的输出轴设有主动齿轮(12);主动齿轮(12)和从动齿轮(11)啮合。4.根据权利要求3所述的多自由度举高灭火巨型机器人,其特征在于:电机减速机(9)为谐波减速机。5.根据权利要求1所述的多自由度举高灭火巨型机器人,其特征在于:支臂(3)共七个,底部的支臂(3)为三个,上方支臂(3)为四个。6.根据权利要求1所述的多自由度举高灭火巨型机器人,其特征在于:多个支臂(3)的设置为前后方向交替设置。7.根据权利要求2所述的多自由度举高灭火巨型机器人,其特征在于:l形的转角管(7)内圆形直径为50 mm
ꢀ‑
80mm。8.根据权利要求7所述的多自由度举高灭火巨型机器人,其特征在于:l形的转角管(7)内圆形直径为50 mm、60 mm或80mm。
技术总结
多自由度举高灭火巨型机器人,属于消防机械设备技术领域,底部支臂通过动力缸铰接,头尾端部之间通过旋转接头铰接。上方支臂通过头尾端部的关节和旋转接头铰接。多个支臂内部有水管成“之”字形拐弯穿过多个支臂,从喷枪头喷水。旋转接头结构可为:一端固定的L形转角管,一端配合另一支臂内水管旋转的结构。关节结构可为:电机减速机带动主动和从动齿轮旋转带动支臂转动升起。本发明多个支臂可以调整多个自由度,自行上升很高的高度进行喷水灭火,可以绕开部分障碍物,拓展了喷水救火的高度。旋转接头可以使水方便的过弯,关节使用电力动力,不需要向高处提供压力介质。不需要向高处提供压力介质。不需要向高处提供压力介质。
技术研发人员:刘俊
受保护的技术使用者:为加智能装备(重庆)有限责任公司
技术研发日:2022.11.14
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。