技术特征:
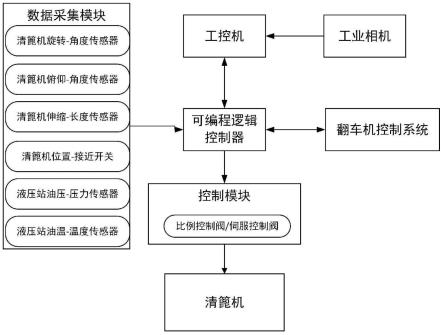
1.一种清篦机控制系统,其特征在于:包括:工业相机,获取煤篦子图像和清篦机运动图像并发送至工控机;数据采集模块,获取清篦机的位姿数据和液压系统的状态数据并发送至工控机;工控机,基于获取的图像信息划分相邻两组清篦机的作业区域,具体为:以每一组清篦机转动中心点为圆心,最短距离为半径获得的扇形范围为理论死区,以相邻两组清篦机的理论死区边缘的切线为分界线,得到每一组清篦机的正常作业区域和死区,每一组清篦机的正常作业范围覆盖相邻一组清篦机的死区范围;工控机,根据工业相机获取的图像信息判断煤篦子被堵塞区域所在的范围,基于划分的作业区域选择所需的清理区域,根据位姿数据和状态数据向清篦机发出指令,执行清理任务。2.如权利要求1所述的一种清篦机控制系统,其特征在于:基于划分的作业区域选择所需的清理区域,工控机根据位姿数据和状态数据向清篦机发出指令,包括:若清理区域包含其中一组清篦机的正常作业范围,则控制与该区域对应的清篦机单独作业;若包含相邻两组清篦机的正常作业范围,则控制两组清篦机同时作业清理对应的煤篦子区域;若清理区域包含其中一组清篦机的死区范围,则控制相邻的另一组清篦机作业,以覆盖该死区范围;若清理区域全部为死区,则根据设定的顺序依次控制每一组清篦机作业交叉作业;若清理区域同时包含正常作业区域和死区范围,则正常作业区域的清理任务优先级高于死区范围。3.如权利要求1所述的一种清篦机控制系统,其特征在于:所述清篦机位于待清理的煤篦子一侧,包括与机械臂连接的末端执行机构,清篦机与液压站连接,通过液压站提供动力实现转动、俯仰、伸缩和末端执行机构动作;机械臂带动末端执行机构伸缩至最短距离为理论死区的半径。4.如权利要求1所述的一种清篦机控制系统,其特征在于:所述数据采集模块包括连接在清篦机上的角度传感器、长度传感器、接近开关传感器和连接在液压站上的压力传感器以及温度传感器,角度传感器包含旋转角角度传感器和俯仰角角度传感器。5.如权利要求4所述的一种清篦机控制系统,其特征在于:所述长度传感器检测清篦机伸缩长度;接近开关传感器确定清篦机的极限位置;温度和压力传感器采集液压站的温度和压力。6.如权利要求1所述的一种清篦机控制系统,其特征在于:还具有可编程逻辑控制器,用于接收和处理数据采集模块获取的数据,接受工控机发送的控制信号和向工控机发送清篦机系统状态信号,可编程逻辑控制器还与翻车机控制系统通讯连接。7.一种清篦机控制方法,其特征在于:包括以下步骤:工控机基于获取的图像信息划分相邻两组清篦机的作业区域:以每一组清篦机转动中心点为圆心,最短距离为半径获得的扇形范围为理论死区,以相邻两组清篦机的理论死区边缘的切线为分界线,得到每一组清篦机的正常作业区域和死区,每一组清篦机的正常作业范围覆盖相邻一组清篦机的死区范围;根据所选择的清理区域,工控机基于位姿数据和状态数据向清篦机发出指令,具体为:
若清理区域包含其中一组清篦机的正常作业范围,则控制与该区域对应的清篦机单独作业;若包含相邻两组清篦机的正常作业范围,则控制两组清篦机同时作业清理对应的煤篦子区域;若清理区域包含其中一组清篦机的死区范围,则控制相邻的另一组清篦机作业,以覆盖该死区范围;若清理区域全部为死区,则根据设定的顺序依次控制每一组清篦机作业交叉作业;若清理区域同时包含正常作业区域和死区范围,则正常作业区域的清理任务优先级高于死区范围。8.如权利要求7所述的一种清篦机控制方法,其特征在于:若清理区域全部为死区,则首先调动第一清篦机作业清理第二清篦机的死区范围,此时第二清篦机保持原点位置不动作,待第一清篦机完成清理任务并返回原点后,第二清篦机开始作业,清理第一清篦机的死区直至任务完成并返回原点。9.如权利要求7所述的一种清篦机控制方法,其特征在于:工控机控机对获取的图像信息进行校正与变换后输出显示。10.如权利要求7所述的一种清篦机控制方法,其特征在于:执行清理任务之前,基于翻车机控制系统获取翻车机的作业状态,在翻车机未作业时,可编程逻辑控制器向工控机发送解除锁定指令。
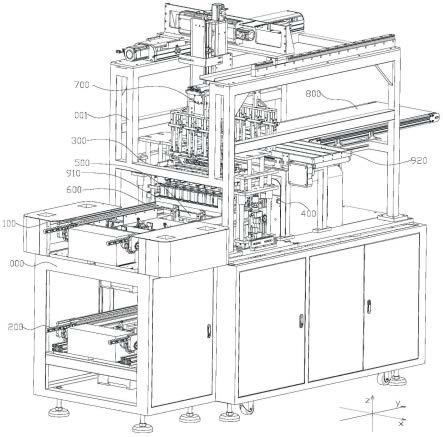
技术总结
本发明涉及一种清篦机控制系统和方法,包括工业相机,获取煤篦子图像和清篦机运动图像并发送至工控机;数据采集模块,获取清篦机的位姿数据和液压系统的状态数据并发送至工控机;工控机,基于获取的图像信息划分相邻两组清篦机的作业区域:以每一组清篦机转动中心点为圆心,最短距离为半径获得的扇形范围为理论死区,以相邻两组清篦机的理论死区边缘的切线为分界线,得到每一组清篦机的正常作业区域和死区,每一组清篦机的正常作业范围覆盖相邻一组清篦机的死区范围;根据工业相机获取的图像信息判断煤篦子被堵塞区域所在的范围,工控机基于划分的作业区域选择所需的清理区域,根据位姿数据和状态数据向清篦机发出指令,执行清理任务。理任务。理任务。
技术研发人员:张成梁 李建雨 葛荣雨 高贯磊 张文斌 刘浩
受保护的技术使用者:济南大学
技术研发日:2022.10.26
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。