1.本发明属于柔性线缆仿真技术领域,具体涉及一种物理模型和几何模型相结合的柔性线缆仿真模型建模方法,包括线缆物理模型建模方法和几何模型建模方法。
背景技术:
2.在复杂的机电产品中,柔性线缆的敷设主要是靠设计者的经验进行线缆敷设,这种方式会造成线缆设计不合理,最终导致线缆的质量问题,设备运行的故障概率增加。柔性线缆的数字建模已经成为线缆设计的必要手段,现有的三维计算机辅助设计软件中(pro/e、catia、ug等)已经具备柔性线缆敷设的功能模块,能够完成线缆几何模型的建模,但却无法考虑线缆的物理属性,如线缆受到的重力、线缆的弯曲、扭转、拉伸变形等物理特性,导致线缆的数字化模型仿真精度低,无法逼真的模拟线缆运动状态。
3.线缆是一种柔性体,具有大变形的特点,现有的线缆数字化模型建模大致可分为两种:一种是基于几何模型的建模方法;一种是考虑线缆物理特性的物理模型建模方法。几何方法的模型一般采用b样条曲线等几何方法建立物体的几何模型来描述物体的形态。物理方法根据力学的原理建立物体的运动学方程,再通过数值求解的方式,得到线缆的位姿信息,再结合线缆的几何模型,实现线缆的运动仿真。
4.常见的线缆物理模型建模方法主要有:有限元模型和质点-弹簧模型。
5.有限元模型,如常见的abaqus、ansys等有限元仿真软件,能够对柔性线缆进行有限元建模仿真;特点是,线缆数字化模型仿真精度高,但效率低,无法保证在虚拟仿真领域的实时运动仿真要求。
6.质点-弹簧模型,将柔性线缆离散为一系列无体积的质量点,质量点之间通过无质量的弹簧模型连接,将柔性线缆等效成质点-弹簧系统,通过建立质点-弹簧系统的动力学方程得到线缆运动的位姿结果,但质点-弹簧系统与对应的线缆几何模型之间的匹配关系复杂,造成线缆可视化几何模型与物理模型不完全匹配。
技术实现要素:
7.(一)要解决的技术问题
8.本发明要解决的技术问题是:如何提供了一种物理模型和几何模型相结合的柔性线缆仿真模型建模方法,既能够真实的表达线缆的物理属性,又能生成逼真的可视化线缆几何模型,而且该方法降低了线缆物理模型的建模难度,提升了线缆的运动仿真效率,能够实现线缆的实时运动仿真分析,该方法为柔性线缆在虚拟仿真中的数字化建模提供了一种有效的方法。
9.(二)技术方案
10.为解决上述技术问题,本发明提供一种物理模型和几何模型相结合的柔性线缆仿真模型建模方法,所述建模方法包括:
11.步骤1:建立柔性线缆的物理模型;
12.步骤2:建立柔性线缆的几何模型;
13.其中,所述步骤1建立柔性线缆的物理模型的过程中,所述柔性线缆物理模型是离散化的线缆模型;所述步骤1包括:
14.步骤101:对待创建的线缆模型进行离散化处理,将线缆模型处理成一系列离散的线缆段模型
15.步骤102:线缆段模型的处理,每个线缆段都建立为刚性杆单元,在线缆段的中心创建集中质量单元,使线缆段的质量集中在刚性杆单元的中心位置;
16.步骤103:线缆段的长度确认,在创建线缆段模型时,指定线缆离散化的分辨率的大小,线缆的分辨率是指单位长度线缆离散化后的线缆段数量,即,当分辨率为100时,表示每1m长度的线缆由100个线缆段模型组成,每个线缆段代表1cm长度;
17.步骤104:线缆段的质量确认,获取待建线缆模型的等效密度、截面形状、线缆直径、线缆的起点和终点安装位置参数,通过线缆的等效参数和线缆段的长度,计算得到每个线缆段的集中质量大小,所有线缆段的质量之和就表示整个线缆的质量;
18.步骤105:线缆段的局部坐标系建立,为了准确描述线缆在空间的位姿,需要在每个线缆段的中心分别建立线缆段的局部坐标系,以线缆段的中心作为原点,x轴为垂直于该线缆段轴向方向的单位矢量,y轴为该点处的线缆段轴向方向上的单位矢量,z轴为该点处的副法线方向单位矢量,可由z=x
×
y得到,确定线缆段局部坐标系;
19.步骤106:世界坐标系的建立,以空间中某一固定点为原点,右手法则建立世界坐标系,世界坐标系是指相对世界固定的坐标系;
20.步骤107:线缆段的空间位置确定,以线缆段的局部坐标系原点在世界系下的坐标确定每个线缆段的空间位置;
21.步骤108:线缆段的空间姿态确定,线缆段局部坐标系的姿态通过世界系的旋转量表示,此处应用四元数的形式表示线缆段的旋转,即可得到线缆段的空间位姿的描述;
22.步骤109:线缆段之间的连接点建立,建立线缆段之间的连接点,以线缆段的端点作为相邻线缆端之间的连接点,即,前一个线缆段的末端点与后一个线缆段的始端点进行连接;
23.步骤110:连接点的坐标确定,确定连接点在线缆段的局部坐标系下的坐标,连接点的坐标与线缆段的中心坐标沿轴向方向始终相差距离,l为线缆段的长度,再通过线缆段局部坐标系与世界坐标系的转换关系,就建立了线缆段连接点在世界场景下的坐标;
24.步骤111:线缆段的连接单元模型建立,在线缆段的连接点之间建立约束单元,统一称为角约束单元,角约束单元通过限制两个连接点之间的相对位移量、弯曲角度值、扭转角度值,实现对线缆的拉伸方向、弯曲方向、扭转方向的自由度的约束,并建立如下约束向量:
[0025][0026]
其中,为整根线缆的角约束向量表达,为线缆段i和i 1之间的线缆角约束向量表达,t为向量的转置,i为角约束单元角标号,nc为整跟线缆的角约束向量数目;
[0027]
步骤112:线缆段之间角约束向量的建立,连接两个相邻线缆段之间的角约束单
元,通过进行表示,对连接线缆段的位移量、弯曲角度量、扭转角度量进行限制,对建立如下表达式:
[0028][0029]
其中,为位移约束,为弯曲角度约束,为扭转角度约束,p
(i,i 1)
为线缆段i连接线缆段i 1的连接点,p
(i 1,i)
为线缆段i 1连接线缆段i的连接点,通过p
(i,i 1)
、p
(i 1,i)
连接点之间的相对位移,限制线缆的拉伸量,θ
[i]
为弯曲角度,限制线缆段之间的弯曲量,ω
[i]
为扭转角度,限制线缆段的扭转量;
[0030]
步骤113:线缆的弹性势能表达式建立,基于cosserat理论的线缆模型,认为线缆的直径远小于变形的长度尺寸,将胡克定律扩展到三维空间,线缆的弹性势能包括了拉伸、弯曲、扭转三个方向的变形,通过引入线缆材料的杨氏模量y、泊松比σ,搭建线缆的弹性势能表达式,u=us ub u
t
,各个含义如下所示:
[0031][0032][0033][0034]
其中,u表示线缆的弹性势能,us表示拉伸变形的势能,ub表示弯曲变形的势能,u
t
表示扭转变形的势能,δx表示伸长量,κ表示曲率,κ=1/r,r为曲率半径,ω为扭转角度;常数cs,cb,c
t
分别表示线缆三个方向的刚度系数值,由线缆的杨氏模量y、泊松比σ参数得到;
[0035]
步骤114:引入角约束向量的线缆弹性模型建立,一根线缆通过离散化处理成n个线缆段模型,线缆段之间通过nc=n-1个角约束单元组成;将角约束正则化引入线缆系统的弹性势能,可得到系统势能的正则化表达式,如下所示,引入角约束的系统势能与线缆的弹性势能理论高度融合;
[0036][0037]
其中,ε为对角矩阵,diag表示对角矩阵数学符号;符号;是与向量刚度系数有关的参数,表示势能刚度系数的倒数;表示系统的约束向量,t为向量的转置符号,i为角约束单元角标号,q为线缆段的广义坐标,表示线缆段的位置和姿态信息;
[0038]
步骤115:将角约束的系统势能引入到系统动力学方程中,在这里建立拉格朗日动力学方程,并对动力学方程进行数值求解,即可得到线缆物理模型的运动仿真结果;
[0039]
至此,步骤1柔性线缆的物理模型建立结束;
[0040]
所述步骤2包括:
[0041]
步骤201:线缆的几何模型建立,采用与物理模型完全匹配的建模方法——离散化几何模型建模方法;以物理模型中每个线缆段为基础,根据线缆段的位置、姿态、线缆直径信息,生成线缆段的几何模型——“胶囊体”模型,胶囊体是指端部带有半球状封口的圆柱体结构,形状类似胶囊状的规则几何体,“胶囊体”的圆柱体长度与线缆段长度一致,直径与线缆实际尺寸一致,线缆整体几何模型由一节节离散化的“胶囊体”几何模型组成;
[0042]
步骤202:通过搭建线缆的物理模型,考虑线缆的真实物理特性,并进行数值求解,得到线缆解算结果,并根据解算结果,实时生成线缆的几何模型,即可得到逼真的线缆仿真效果。
[0043]
(三)有益效果
[0044]
与现有技术相比较,本发明中对柔性线缆的物理模型建模,采用离散化的集中质量点和杆组成,相比较传统的质点-弹簧模型,以杆单元替代弹簧模型,降低了线缆物理模型的复杂度和建模难度,在保证线缆仿真物理精度的同时,提升了线缆的仿真效率,实现线缆的实时动力学仿真;
[0045]
本发明离散化的线缆段之间建立新型的角约束单元,通过角约束单元去实现柔性线缆的拉伸、弯曲、扭转变形特性的表达,同时建立了角约束单元与线缆物理材质之间的关系,能够通过设置线缆的物理材质参数,实现柔性线缆物理属性的改变;
[0046]
本发明采用规则的“胶囊体”几何模型,降低了几何特征的复杂度,有效的提升了柔性线缆在碰撞检测过程中的效率,同时,通过这种形式也能够更加光滑的表现线缆的整体显示效果;
[0047]
本发明线缆的几何模型采用离散化的“胶囊体”单元,通过这种方式能够保证线缆的几何模型和物理模型的匹配性,从而保证柔性线缆数字化模型的显示精度,同时,以物理模型驱动几何模型,更真实地表现虚拟线缆的运动仿真效果。
附图说明
[0048]
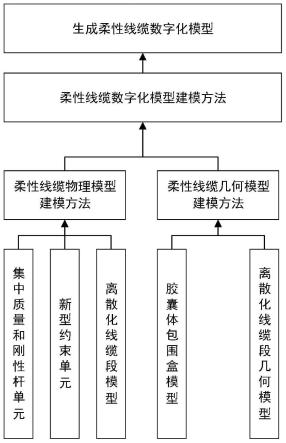
图1为本发明柔性线缆数字化模型建模方法流程图。
[0049]
图2为本发明柔性线缆物理模型示意图。
[0050]
图3为本发明柔性线缆几何模型示意图。
具体实施方式
[0051]
为使本发明的目的、内容、和优点更加清楚,下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
[0052]
为解决上述技术问题,本发明提供一种物理模型和几何模型相结合的柔性线缆仿真模型建模方法,所述建模方法包括:
[0053]
步骤1:建立柔性线缆的物理模型;
[0054]
步骤2:建立柔性线缆的几何模型;
[0055]
其中,所述步骤1建立柔性线缆的物理模型的过程中,所述柔性线缆物理模型是离散化的线缆模型;所述步骤1包括:
[0056]
步骤101:对待创建的线缆模型进行离散化处理,将线缆模型处理成一系列离散的
线缆段模型;
[0057]
步骤102:线缆段模型的处理,每个线缆段都建立为刚性杆单元,在线缆段的中心创建集中质量单元,使线缆段的质量集中在刚性杆单元的中心位置;
[0058]
步骤103:线缆段的长度确认,在创建线缆段模型时,指定线缆离散化的分辨率的大小,线缆的分辨率是指单位长度线缆离散化后的线缆段数量,即,当分辨率为100时,表示每1m长度的线缆由100个线缆段模型组成,每个线缆段代表1cm长度;
[0059]
步骤104:线缆段的质量确认,在线缆物理模型建模之前,先获取待建线缆模型的等效密度、截面形状、线缆直径、线缆的起点和终点安装位置参数,通过线缆的等效参数和线缆段的长度,计算得到每个线缆段的集中质量大小,所有线缆段的质量之和就表示整个线缆的质量;
[0060]
步骤105:线缆段的局部坐标系建立,为了准确描述线缆在空间的位姿,需要在每个线缆段的中心分别建立线缆段的局部坐标系,以线缆段的中心作为原点,x轴为垂直于该线缆段轴向方向的单位矢量,y轴为该点处的线缆段轴向方向上的单位矢量,z轴为该点处的副法线方向单位矢量,可由z=x
×
y得到,确定线缆段局部坐标系;
[0061]
步骤106:世界坐标系的建立,以空间中某一固定点为原点,右手法则建立世界坐标系,世界坐标系是指相对世界固定的坐标系;
[0062]
步骤107:线缆段的空间位置确定,以线缆段的局部坐标系原点在世界系下的坐标确定每个线缆段的空间位置;
[0063]
步骤108:线缆段的空间姿态确定,线缆段局部坐标系的姿态通过世界系的旋转量表示,此处应用四元数的形式表示线缆段的旋转,即可得到线缆段的空间位姿的描述;
[0064]
步骤109:线缆段之间的连接点建立,建立线缆段之间的连接点,以线缆段的端点作为相邻线缆端之间的连接点,即,前一个线缆段的末端点与后一个线缆段的始端点进行连接;
[0065]
步骤110:连接点的坐标确定,确定连接点在线缆段的局部坐标系下的坐标,连接点的坐标与线缆段的中心坐标沿轴向方向始终相差距离,l为线缆段的长度,再通过线缆段局部坐标系与世界坐标系的转换关系,就建立了线缆段连接点在世界场景下的坐标;
[0066]
步骤111:线缆段的连接单元模型建立,在线缆段的连接点之间建立约束单元,这是一种新型的约束单元,统一称为角约束单元,角约束单元通过限制两个连接点之间的相对位移量、弯曲角度值、扭转角度值,实现对线缆的拉伸方向、弯曲方向、扭转方向的自由度的约束,并建立如下约束向量:
[0067][0068]
其中,为整根线缆的角约束向量表达,为线缆段i和i 1之间的线缆角约束向量表达,t为向量的转置,i为角约束单元角标号,nc为整跟线缆的角约束向量数目;
[0069]
步骤112:线缆段之间角约束向量的建立,连接两个相邻线缆段之间的角约束单元,通过进行表示,对连接线缆段的位移量、弯曲角度量、扭转角度量进行限制,对建立如下表达式:
[0070][0071]
其中,为位移约束,为弯曲角度约束,为扭转角度约束,p
(i,i 1)
为线缆段i连接线缆段i 1的连接点,p
(i 1,i)
为线缆段i 1连接线缆段i的连接点,通过p
(i,i 1)
、p
(i 1,i)
连接点之间的相对位移,限制线缆的拉伸量,θ
[i]
为弯曲角度,限制线缆段之间的弯曲量,ω
[i]
为扭转角度,限制线缆段的扭转量;
[0072]
步骤113:线缆的弹性势能表达式建立,基于cosserat理论的线缆模型,认为线缆的直径远小于变形的长度尺寸,将胡克定律扩展到三维空间,线缆的弹性势能包括了拉伸、弯曲、扭转三个方向的变形,通过引入线缆材料的杨氏模量y、泊松比σ,搭建线缆的弹性势能表达式,u=us ub u
t
,各个含义如下所示:
[0073][0074][0075][0076]
其中,u表示线缆的弹性势能,us表示拉伸变形的势能,ub表示弯曲变形的势能,u
t
表示扭转变形的势能,δx表示伸长量,κ表示曲率,κ=1/r,r为曲率半径,ω为扭转角度;常数cs,cb,c
t
分别表示线缆三个方向的刚度系数值,由线缆的杨氏模量y、泊松比σ参数得到;
[0077]
步骤114:引入角约束向量的线缆弹性模型建立,一根线缆通过离散化处理成n个线缆段模型,线缆段之间通过nc=n-1个角约束单元组成;将角约束正则化引入线缆系统的弹性势能,可得到系统势能的正则化表达式,如下所示,引入角约束的系统势能与线缆的弹性势能理论高度融合;
[0078][0079]
其中,ε为对角矩阵,diag表示对角矩阵数学符号;符号;是与向量刚度系数有关的参数,表示势能刚度系数的倒数;表示系统的约束向量,t为向量的转置符号,i为角约束单元角标号,q为线缆段的广义坐标,表示线缆段的位置和姿态信息;
[0080]
步骤115:将角约束的系统势能引入到系统动力学方程中,在这里建立拉格朗日动力学方程,并对动力学方程进行数值求解,即可得到线缆物理模型的运动仿真结果;
[0081]
至此,步骤1柔性线缆的物理模型建立结束;
[0082]
所述步骤2包括:
[0083]
步骤201:线缆的几何模型建立,采用与物理模型完全匹配的建模方法——离散化几何模型建模方法;以物理模型中每个线缆段为基础,根据线缆段的位置、姿态、线缆直径
信息,生成线缆段的几何模型——“胶囊体”模型,胶囊体是指端部带有半球状封口的圆柱体结构,形状类似胶囊状的规则几何体,“胶囊体”的圆柱体长度与线缆段长度一致,直径与线缆实际尺寸一致,线缆整体几何模型由一节节离散化的“胶囊体”几何模型组成;
[0084]
步骤202:通过搭建线缆的物理模型,考虑线缆的真实物理特性,并进行数值求解,得到线缆解算结果,并根据解算结果,实时生成线缆的几何模型,即可得到逼真的线缆仿真效果。
[0085]
实施例1
[0086]
本实施例的技术方案包括:建立了一种物理模型和几何模型相结合的柔性线缆仿真模型建模方法,能够实现柔性线缆物理模型和几何模型的完全匹配,同时,基于柔性线缆数字化模型的建模方法,提出了一种基于刚性线缆模型快速生成柔性线缆模型的方法,实现柔性线缆的快速生成。本发明的建模方法流程如图1所示。以单根柔性线缆数字化建模为实例,说明本发明的具体实施方式。
[0087]
第一步,柔性线缆物理模型建模。
[0088]
如图2所示,为柔性线缆物理模型示意图。柔性线缆由离散化的线缆段模型组成,每个线缆段都构建为刚性的杆单元结构,线缆段包括集中质量的点和线缆段之间的连接点。图示中i代表第i个线缆段的刚性杆单元,xiyizi代表第i个线缆段局部坐标,xiyizi位于第i个线缆段的段质心位置和集中质量点位置,所有线缆段的集中质量总和即为整个线缆的总质量;线缆段之间分别通过p点连接,相邻线缆段的连接点之间建立新型的约束单元,通过这种约束单元来表示线缆的拉伸、弯曲、扭转特性。
[0089]
通过线缆段组合成线缆模型,描述线缆的空间位置姿态,就是确定组成线缆的每个线缆段的空间位置描述,所以需要构建固定于线缆段中心的局部坐标系与固定于空间的世界坐标系之间的关系,从而得到线缆的空间位置姿态描述。
[0090]
在线缆段的质心位置建立局部坐标,建立线缆段的空间局部坐标系(p-xyz),其中,x为垂直于该线缆段轴向方向的单位矢量,y为该点处的线缆段轴向方向上的单位矢量,z为该点处的副法线方向单位矢量,可由z=x
×
y得到。以空间中一固定点o建立世界坐标系(o-uvw),o点到空间中一点的向量为r。通过建立线缆段局部坐标系与世界坐标系之间的转换关系,完成对线缆段的空间位姿进行描述。
[0091]
线缆段空间位置描述:线缆段局部坐标系与世界坐标系之间位置转换直接通过向量的平移即可完成。
[0092]
线缆段空间姿态描述:线缆段局部坐标系的姿态通过世界坐标系的旋转量表示,本方案采用四元数λ表示旋转,
[0093]
λ=(λ
0 λ
1 λ
2 λ3)
t
,
[0094]
其中,λ0为四元数实部参数,λ1、λ2、λ3分别为对应三个坐标轴方向的虚部参数;四元数满足约束并且四元数参数λk(0≤k≤3)均为实数。
[0095]
定义世界坐标系的基矢量为d
10
、d
20
、d
30
,其中d
10
、d
20
、d
30
分别为对应世界坐标系三个方向的矢量基,矢量基表达为:
[0096][0097]
[0098][0099]
定义线缆段局部坐标系基矢量为d1、d2、d3,d1、d2、d3分别为对应线缆局部坐标系三个方向的矢量基,通过线缆段局部坐标系的在世界坐标系下的姿态四元数λ可以得到旋转矩阵r,矢量d
10
、d
20
、d
30
经过旋转矩阵的转动变换得到线缆段局部坐标系的基矢量,表达式如下:
[0100][0101]
通过以上坐标转换,即可建立线缆段局部坐标系的空间位姿描述。
[0102]
下一步,线缆拉伸、弯曲、扭转约束模型的建立。
[0103]
图2柔性线缆物理模型示意图可知,柔性线缆离散化为线缆段,线缆段之间通过角约束单元进行连接。在线缆段连接点之间建立的角约束单元,能够表现线缆的弯曲、扭转、拉伸等物理特性。相邻线缆段之间的相对位置、弯曲角度、扭转角度的描述如下所示:
[0104]
柔性线缆段的角约束向量为:
[0105][0106]
其中每一个角约束连接着线缆段i和i 1。为了处理柔性线缆的大变形,弯曲、扭转角直接用角度来表示。
[0107]
如图2中线缆段的局部坐标表示方式,在这里引入固定向量d(i)=y(i),表示线缆段i处的局部线缆段轴向方向向量,引入向量i处的局部线缆段轴向方向向量,引入向量和向量并且向量x(i)和z
(i 1)
分别垂直于d(i)和d
(i 1)
。线缆的角约束表达式如下:
[0108][0109]
角约束单元的第一个三维分量对应于一个球形约束球形约束限制了线缆的拉伸。每个线缆段与相邻线缆段之间有两个连接点,分别为p
(i,1)
和p
(i,2)
,p
(i,1)
为线缆段与前一个线缆段之间的连接点,p
(i,2)
为线缆段与后一个线缆段之间的连接点;如,p
(i,2)
和p
(i 1,1)
为线缆段i和线缆段i 1之间的连接点,两个连接点之间建立有角约束单元。
[0110]
在世界坐标系中表示:
[0111]
p
(i,2)
=x(i) r
(i,2)
[0112]
其中,x(i)为线缆段的质心位置,r
(i,2)
为连接点相对线缆质心的位置。
[0113]
角约束单元的第二个三维分量对应于约束φb=θ可以限制线缆段之间的弯曲量,表现线缆的弯曲特性;
[0114]
角约束单元的第三个三维分量对应于约束φ
t
=ω可以限制线缆段绕轴的旋转,表现线缆的扭转特性,产生扭转力。
[0115]
弯曲和扭转的角度计算方法如下:
[0116]
θ
[i]
=arctan[|d(i)×d(i 1)
|/d(i)·d(i 1)
)]
[0117][0118]
在这里,角度通过反正切进行计算,角度的范围在-π到π之间,η表示扭转的圈数,i表示角约束的标号。
[0119]
下一步,柔性线缆的能量表达。
[0120]
柔性线缆在运动仿真中需要满足的变形条件如下,包括r弯曲特性,ω扭转特性,δx拉伸特性。一般线缆的变形是拉伸、弯曲、扭转变形的组合,由此产生的应力取决于线缆的材料参数,包括杨氏模量和泊松比等。长度为l的线缆的变形势能可以表示为:
[0121][0122][0123][0124]
其中,δx表示伸长率,κ表示曲率(κ=1/r),r为曲率半径,ω为扭转角度。常数cs,cb,c
t
分别表示线缆三个方向的刚度系数值:
[0125]cs
=ya/l,
[0126]
cb=yia/l,
[0127]ct
=yia/2(1 σ)l
[0128]
其中,a是线缆的横截面积,ia是这个线缆段沿中心轴的转动惯量,y是材料的杨氏模量,σ是泊松比,l是线缆的长度。
[0129]
下一步,引入约束的柔性线缆弹性模型的表达。
[0130]
柔性线缆的物理模型由n个刚体通过nc=n-1个约束组成。通过引入一个特殊的角约束,该约束能够用于参数化物体对之间的几何拉伸、弯曲和扭转,该输出被正则化时,代表物理弹性的属性被引入到线缆模型中,正则化参数对应于拉伸、弯曲、扭转刚度。将约束正则化引入柔性线缆物理模型系统,建立起柔性线缆弹性模型与系统约束之间的关系,进而实现通过系统的角约束来表现柔性线缆的物理特性。
[0131]
通过约束正则化引入系统的势能,可得系统表达形式:
[0132][0133]
其中,ε为对角矩阵,diag表示对角矩阵数学符号,符号,是与向量刚度系数有关的参数,表示势能刚度系数的倒数,t为向量的转置符号,i为角约束单元角标号,q为线缆段的广义坐标,表示线缆段的位置和姿态信息;
[0134]
对于具有长度为la和lb的两个相邻线缆段a和b之间的角约束,具有以下系数,通常情况下,同一根线缆离散化的线缆段长度相同:
[0135][0136][0137][0138]
通过转换,将曲率表示的线缆弯曲势能,改为弯曲弧度θ进行测量,当假设局部弯曲角度较小时,κ≈θ/(la lb),转换后的弯曲变形势能为:
[0139][0140]
至此,完成线缆的物理模型搭建,将角约束的系统势能引入到系统动力学方程中,建立拉格朗日动力学方程,并对动力学方程进行数值求解,即可得到线缆物理模型的运动仿真结果。
[0141]
下一步,在线缆物理模型的基础上进行线缆几何模型的搭建。
[0142]
柔性线缆几何模型,如图3所示,几何模型采用与物理模型完全匹配的建模方法——离散化几何模型建模方法;以物理模型中每个线缆段为基础,根据线缆段的位置、姿态、线缆直径信息,生成线缆段的几何模型——“胶囊体”模型,胶囊体是指端部带有半球状封口的圆柱体结构,形状类似胶囊状的规则几何体,图3中i表示第i个“胶囊体”模型,第i个“胶囊体”的圆柱体长度与第i个线缆段长度一致,直径与线缆实际直径尺寸一致,线缆整体几何模型由一节节离散化的“胶囊体”几何模型组成,这种基于物理模型生成柔性线缆的几何模型,能够实现几何模型与物理模型的高度匹配。
[0143]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。