1.本发明属于新能源汽车技术领域,涉及一种基于多目标粒子群算法的电动汽车充电站双视角选址方法。
背景技术:
2.电动汽车作为解决全球化石燃料污染和气候变化的有效方案,在全球范围内的渗透率不断提升,某些国家预期于2025年将电动汽车市场份额提升至接近100%。电动汽车的大规模发展催生出充电辅助基础设施的巨大发展空间,换电站是一类重要的充电基础设施,但受接口标准化等限制,目前只有少量品牌投建。充电站属于另一类基本类型的充电基础设施,包含快充和慢充两类充电设备,其中慢充设备成本较低但充电时间需要4~8个小时,而快充设备可以将充电时间缩短至0.1~0.15个小时,但需要的花费远高于慢充设备的成本。据调查显示,接近99.3%的用户会因充电速度快首选快充设备,但目前公用充电设备中快充设备占比仅为四成,无法满足消费者的真实需求,而配置过多的快充设备会导致电力供应不足等问题发生,因此,在考虑充电站规划时不能回避快慢充背景。
3.充电站选址布局优化有利于满足越来越多的充电需求,能够解决很多地方面临着的有车无充电桩、有充电桩无车的窘境,可以提高充电站利用率。现有电动汽车充电站选址研究中,公开号为cn202210152022.4的发明专利公开了一种电动汽车充电桩选址方法和装置,具体公开了一种结合用户用电需求的考虑运营商收益最大化的选址方法;公开号为cn112418692a的发明专公开了一种基于双层复杂网络模型的充电桩选址方法,考虑长、短途驾驶对超级充电站的需求,以城市为节点,假设每个节充电站内有一个充电桩,建立了一种双层网络模型用于超级充电站选址;电动汽车充电站的选址规划中更多地考虑了成本问题,考虑到应用复杂网络方法研究选址问题时更多地聚焦于拓扑指标等网络静态特征,忽略了网络演化、级联等动态行为的影响,导致所得基于静态特征的选址模型本身不能反映实际系统的动态行为,其次,利用基于静态特征的选址模型得到的选址结果无法响应实际中动态充电需求,导致选址结果的可靠性存在问题。
4.充电站选址存在便捷性、经济性、安全性等多种优化目标,相比于整数规划等经典优化手段,启发式优化算法在解决非线性多目标的选址问题时体现出更强的适应性,主要应用的算法类型包括遗传算法、差分进化算法、粒子群算法、模拟退火算法、灰狼算法等,其中粒子群算法在选址问题中有更多应用。考虑网络转移性能的城市快速充电网络规划(葛少云、申凯月、刘洪、张强,2020年11月公开),基于对交通路网、电动汽车、充电站网络、配电网之间的交互分析,构建了兼顾充电站运营商、电动汽车用户、配电网成本的选址模型,采用基于小世界网络改进的粒子群优化算法进行求解,但基于小世界网络对粒子群算法进行优化的研究在应用于充电站选址前已被提出,算法的速度更新公式以离散状态为主,全局遍历能力有待优化。
技术实现要素:
5.本发明实施例的目的在于提供一种基于多目标粒子群算法的电动汽车充电站双视角选址方法,以解决现有电动汽车充电站的选址方法考虑网络视角时主要考虑了静态属性从而导致选址结果的可靠性不佳的问题,以及现有的基于改进的多目标粒子群算法的充电站选址方法中的改进的多目标粒子群算法速度更新公式以离散状态为主、全局遍历能力不佳的问题。
6.本发明实施例所采用的技术方案是:基于多目标粒子群算法的电动汽车充电站双视角选址方法,包括以下步骤:
7.步骤s1:基于灰色预测模型,预测充电站数量;
8.步骤s2:在充电站网络视角下构建包含充电站网络平均路径长度和充电站网络效率的选址优化目标;
9.步骤s3:构建成本视角下的选址优化目标;
10.步骤s4:构建充电站网络视角和成本视角结合的多目标函数与约束条件;
11.步骤s5:基于多目标函数与约束条件,通过多目标粒子群算法在充电站备选位置坐标集合中对构建的带约束条件的多目标函数进行求解,获取最终选址方案。
12.进一步的,步骤s1中,采用含一个输入变量的一阶灰色预测模型gm(1,1)预测充电站数量,通过挖掘充电站数量的历史数据,分析其潜在的规律和联系,拟合充电站保有量的变化趋势,得到规划年限对应的充电站数量。
13.进一步的,步骤s2的具体实现过程如下:
14.步骤s21:以充电站为节点且充电站间联系为连边,以预测的充电站数量即t年后充电站的保有量n
t
为节点数量,在不同概率p下基于ws演化算法生成指定节点数量的充电站网络;
15.步骤s22:分别计算演化形成的充电站网络的网络平均路径长度l,计算公式为:
[0016][0017]
式中,d
ij
为每个充电站网络中节点i与节点j之间的最短路径;
[0018]
步骤s23:对演化形成的充电站网络分别运行级联失效,测试每个充电站网络的网络效率。
[0019]
进一步的,步骤s23中,采用负载容量模型作为充电站网络级联失效模型,负载容量模型表达式如下:
[0020][0021]ca,i
=fi θf
iψ
;
[0022]
其中,c
a,i
为充电站i的电能容量,由快充容量与慢充容量组成;fi为充电站i的初始电力负载,θ为容量比例参数,ψ为可调参数,表示fi的ψ次方;
[0023]
设当充电站i的快充容量不能满足需求时,负载向剩余快充容量较大的充电站转移,设计当一次转移负载未被完全容纳时发生级联失效;
[0024]
失效后充电站网络效率δf的计算公式为:
[0025][0026]
式中,d
ij,f
为充电站网络失效稳定后节点i与节点j间的最短路径,0≤δf≤1。
[0027]
进一步的,步骤s3中,构建成本视角下包含环境成本ce和经济成本cf的选址优化目标;
[0028]
环境成本ce由电力生产时能源转化碳排放、充电过程中碳排放来共同核算,如下式所示:
[0029][0030]
式中,c1表示电力生产能源消耗碳排放转化系数,co表示供电中产生的标准能耗,n0为现有充电站数量,c
a,i
为充电站i的电能容量,f
a,i
为充电站i的电力负载;c2表示快充桩碳排放转化系数,ηi为充电站i的快充桩占比,c3表示慢充桩碳排放转化系数;
[0031]
经济成本cf由充电站建设成本与运营成本构成,如下式所示:
[0032][0033]
式中,r为资金回收率,c4、c5、c6、c7分别为快充桩、慢充桩、土地及电力走廊的建设成本系数,e为充电站网络的连边数,λ为折旧系数。
[0034]
进一步的,步骤s4中,将充电站网络的网络效率δf、网络平均路径长度l、经济成本cf与环境成本ce进行综合处理,得到多目标函数f为:
[0035]
minf={l,δ
f-1
,ce,cf}。
[0036]
进一步的,步骤s4中,电动汽车充电站选址定容的约束条件包括网络小世界性约束、充电站容量约束、充电站间距约束、碳排放配额约束,其中:
[0037]
网络小世界性约束为:
[0038][0039]
其中,j是集聚系数,je是与候选充电站网络节点数相同的随机网络即等价随机网络的集聚系数,le是等价随机网络的平均路径长度,je和le根据生成的随机网络计算得到,当上述不等式成立时,判断充电站网络具备小世界特性;
[0040]
容量约束为:
[0041]cmin
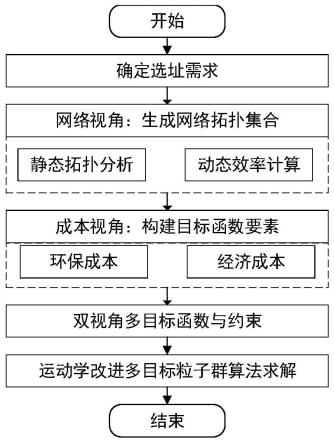
<c
a,i
<c
max
;
[0042]
η
min
<ηi<η
max
;
[0043]
其中,c
min
、c
max
分别为单个充电站容量的最小值与最大值,η
min
、η
max
分别为快充桩的最小占比与最大占比;
[0044]
充电站间距约束为:
[0045]rij
≥r
min
,i≠j;
[0046]
其中,r
ij
为充电站网络中充电站i与充电站j之间的直线距离,r
min
为充电站网络中充电站i与充电站j之间的最小距离;
[0047]
充电站碳排放配额约束为:
[0048]ce
≤ec;
[0049]
其中,ec为最大碳排放分配额度。
[0050]
进一步的,步骤s5的具体实现过程如下:
[0051]
步骤s51:根据实际地理状况以及步骤s1预测的t年后充电站的保有量n
t
,搜集并输入充电站备选位置坐标集合,在充电站备选位置坐标集合内随机生成若干种充电站网络布局并将其编译为粒子群初始位置,得到初始种群,种群中的每个粒子代表一种充电站网络布局;
[0052]
步骤s52:根据初始种群的支配关系得到初始的精英解集;
[0053]
步骤s53:开始迭代,计算精英解集中的每个粒子在构建的多目标函数中的拥挤距离,并生成全局最优解集:
[0054][0055][0056]
式中,dist[i]表示粒子i在多目标函数下的拥挤距离,distk[i]表示粒子i在目标函数k下的拥挤距离,fk[i 1]表示粒子i 1在目标函数k下的函数值,fk[i-1]表示粒子i-1在目标函数k下的函数值,表示目标函数k的最大值,表示目标函数k的最小值,其中,目标函数k表示多目标函数中的每个目标函数;
[0057]
步骤s54:在全局最优解集中随机选择全局最优解,基于多目标粒子群算法更新粒子群速度和位置,并利用构建的多目标函数与约束条件计算粒子的适应度值;
[0058]
步骤s55:更新每个粒子的个体最优值,并设定小概率接受劣质解,得到更新后的新种群;
[0059]
步骤s56:合并新种群和精英解集后,根据合并所得种群的支配关系更新精英解集,当更新后的精英解集的粒子数大于初始种群时,按照拥挤距离从小到大的顺序对当前精英解集中的粒子进行排序,删除当前精英解集中拥挤距离小的粒子,使当前精英解集的粒子数量与初始种群数相同;
[0060]
步骤s57:判断是否满足终止条件,若达到设定的迭代次数或者适应度值满足要求,则结束迭代,导出精英解集,并画出pareto前沿,获得非支配帕累托最优解集;否则,返回步骤s53。
[0061]
进一步的,步骤s54中,通过基于运动学改进的多目标粒子群算法更新粒子群速度和位置,速度更新公式为:
[0062][0063]
式中,i表示粒子代号,j表示粒子维度,v
i,j
(t)表示粒子i在t时刻、维度j上的速度,v
i,j
(t 1)表示粒子i在t 1时刻、维度j上的速度,ω表示惯性权重因子,sub和inf对应表示充电站备选位置坐标集合中的上界和下界,表示粒子运动的急动度,表示粒子在t时刻沿局部最优方向的速度分量的导数,表示粒子在t时刻沿全局最优方向的速度
分量的导数,分量的导数,是粒子i的当前个体最优值,g
best,j
(t)是粒子群当前全体最优值;x
i,j
(t)表示粒子i在t时刻、维度j上的搜索位置;
[0064]
位置更新公式为:
[0065]
x
i,j
(t 1)=x
i,j
(t) v
i,j
(t 1);
[0066]
式中,x
i,j
(t 1)表示粒子i在t 1时刻、维度j上的搜索位置,代表一种充电站网络布局中所有充电站的坐标集合。
[0067]
进一步的,步骤s53中,计算精英解集中的每个粒子在构建的多目标函数中每个目标函数下的拥挤距离后,按照从大到小的顺序排序,选择拥挤距离distk[i]在前10%的粒子i的位置生成全局最优解集。
[0068]
本发明实施例的有益效果是:
[0069]
1.在以往充电站选址考虑的成本视角基础上,引入复杂充电站网络视角的选址目标,并在成本测算时融合了网络拓扑影响,在网络层面进一步考虑了网络静动态性质,使得选址不再依据单一的成本要素,而是进一步增添了对实际网络结构属性的考虑,从而得出具有更强解释性的选址结果;在目标设计时,考虑快慢充背景对各个要素的具体影响,在满足消费者的真实需求的同时,避免配置过多的快充设备导致电力供应不足,同时保证了电力系统的稳定性和充电站的利用率,使得选址结果更具实际意义,解决了现有电动汽车充电站的选址方法考虑网络视角时主要考虑了静态属性从而导致选址结果的可靠性不佳的问题;
[0070]
2.提出一种基于运动学改进的多目标粒子群算法,通过赋予粒子连续搜索能力,提升求解多目标优化的全局搜索能力以及求解精度,使得所得选址结果更加可靠,解决了现有的基于改进的多目标粒子群算法的充电站选址方法中的改进的多目标粒子群算法速度更新公式以离散状态为主、全局遍历能力不佳的问题。
附图说明
[0071]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0072]
图1是本发明实施例的基于多目标粒子群的电动汽车充电站双视角选址方法的流程图。
[0073]
图2是不同连边依据下得到的充电站网络拓扑示意图。
[0074]
图3是充电站演化网络示意图。
[0075]
图4是多目标粒子群算法的流程图。
[0076]
图5是nguyen-dupuis网络结构示意图。
[0077]
图6是运动学改进的多目标粒子群算法的收敛效果图。
[0078]
图7是不同寻优次数下充电站网络效率随时间的变化曲线图。
具体实施方式
[0079]
下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,
显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0080]
本实施例提出一种基于多目标粒子群的电动汽车充电站双视角选址方法,如图1所示,包括步骤s1~s5。
[0081]
步骤s1:基于灰色预测模型,预测充电站数量。
[0082]
电动汽车保有量受需求、政策等多种因素影响而具有不确定性,灰色预测模型是基于灰色系统理论的一种数学模型,适用于处理包含不确定信息的序列,采用含一个输入变量的一阶灰色预测模型gm(1,1)预测充电站数量,通过挖掘充电站数量的历史数据,分析其潜在的规律和联系,拟合充电站保有量的变化趋势,得到规划年限对应的预测数据即充电站数量,根据规划年限对应的预测数据进一步开展充电桩选址。
[0083]
步骤s2:在充电站网络视角下构建包含充电站网络平均路径长度和充电站网络效率的选址优化目标,具体实现过程如下:
[0084]
步骤s21:以充电站为节点且充电站间联系为连边,以预测的充电站数量即t年后充电站的保有量n
t
为节点数量,在不同概率p下基于ws演化算法生成指定节点数量的充电站网络,具体是随机初始化一个指定数量节点n
t
的充电站网络,以概率p随机地重新连接充电站网络中原有的每条边,即把每条边的一个节点保持不变,另一个节点改取为网络中随机选择的一个节点,通过调整参数p即可生成具备不同网络特征的充电站网络,如图3所示,具备相同节点数量但由不同概率p导致生成不同的充电站网络,相同节点数目下的充电站网络具备不同的静态拓扑差异;
[0085]
步骤s22:分别计算演化形成的充电站网络的网络平均路径长度l,充电站网络平均路径长度l表征充电站网络中任意两节点间的平均距离,计算公式为:
[0086][0087]
式中,每个充电站网络中节点i与节点j之间的最短路径。
[0088]
在以充电站点为节点、充电站点间联系为连边建立复杂充电站网络时,需要考虑连边表示的联系的含义。当以电网母线为连边依据时,即对从同一电网母线获取电能的充电站进行连边时,l表示充电站接入电网所需经历的复杂程度,l越小表示充电站接入电网所需经历的复杂程度越小,越容易依据现有电力网络布局建设充电站;由于拟建设充电站的位置不同,建成后的充电站网络构型出现差异,如图2所示,展示了两类不同选址方案下的充电站网络拓扑差异。图2中,当以电网母线为连边依据时,方案1所示的充电站分布下左侧和中间充电站可连接到左侧母线,右侧和中间充电站可连接到右侧母线,由此三个充电站进行连边形成链式结构;方案2所示的充电站分布下左侧和中间充电站可连接到左侧母线,仅右侧充电站连接到右侧母线形成了孤立节点。当以用户前往充电站充电的便利程度为连边依据时,l表征用户更换充电站的难易程度,充电站网络平均路径长度l越短,即从一个充电站驶向另一个充电站时越容易,具有较小l值的充电站网络更有利于满足用户因排队等原因从某一充电站换到其他充电站充电时的需求,方案1比方案2更能有效应对换站充电现象。综上,静态视角下网络的拓扑指标对衡量优化目标具有实际意义,充电站网络平均路径长度l越小的充电站布局方案更优。
[0089]
步骤s23:对演化形成的充电站网络分别运行级联失效,测试每个充电站网络的网络效率δf,评估充电站网络级联失效结果(失效的效率损失),具体可采用负载容量模型作为充电站网络级联失效模型,负载容量模型表达式如下:
[0090][0091]ca,i
=fi θf
iψ
;
[0092]
其中,c
a,i
为充电站i的电能容量,由快充容量与慢充容量组成;fi为充电站i的初始电力负载,θ为容量比例参数,ψ为可调参数,表示fi的ψ次方。
[0093]
受多种因素影响,快充电桩普遍不足,设当充电站i的快充容量不能满足需求时,负载向剩余快充容量较大的充电站转移,设计当一次转移负载未被完全容纳时发生级联失效,采用充电站网络效率δf衡量网络状态:
[0094][0095]
式中,d
ij,f
为充电站网络失效稳定后节点间的最短路径,0≤δf≤1,δf值越大表示充电站网络效率越高、级联失效造成的不利影响越小、充电站网络抵抗扰动的能力即抵抗失效能力越强。级联失效测试以不再有新的节点转为失效状态为结束标志,并且即使节点失效也不会从充电站网络中删除,充电站网络拓扑结构在级联失效过程中始终保持不变,因此经过级联失效测试后可获得充电站网络中失效稳定后节点间的最短路径d
ij,f
,进而计算出失效后充电站网络效率δf来衡量失效结果。
[0096]
步骤s3:构建成本视角下的选址优化目标,本实施例在成本视角下主要包含环境成本ce和经济成本cf。
[0097]
环境成本ce由电力生产时能源转化碳排放、充电过程中碳排放来共同核算,如下式的第1项与第2项所示:
[0098][0099]
式中,c1表示电力生产能源消耗碳排放转化系数,co表示供电中产生的标准能耗,n0为现有充电站数量,f
a,i
为充电站i的电力负载;区分充电站内快慢充碳排放差异,c2表示快充桩碳排放转化系数,ηi为充电站i的快充桩占比,c3表示慢充桩碳排放转化系数。
[0100]
经济成本cf由充电站建设成本与运营成本构成,如下所示:
[0101][0102]
式中,r为资金回收率,c4、c5、c6、c7分别为快充桩、慢充桩、土地及电力走廊的建设成本系数,e为充电站网络的连边数,λ为折旧系数。
[0103]
步骤s4:构建充电站网络视角和成本视角结合的多目标函数与约束条件。
[0104]
将充电站网络效率δ、充电站网络的网络平均路径长度l和充电站的经济成本cf与环境成本ce进行综合处理,得到多目标函数为:
[0105]
minf={l,δ
f-1
,ce,cf}。
[0106]
电动汽车充电站选址定容的约束条件包括网络小世界性约束、充电站容量约束、充电站间距约束、碳排放配额约束等,其中:
[0107]
网络小世界性约束为:
[0108][0109]
其中,j是集聚系数,je是与候选充电站网络节点数相同的随机网络即等价随机网络的集聚系数,le是等价随机网络的平均路径长度,je和le根据生成的随机网络计算得到,当上述不等式成立时,判断充电站网络具备小世界特性;
[0110]
容量约束为:
[0111]cmin
<c
a,i
<c
max
;
[0112]
η
min
<ηi<η
max
;
[0113]
其中,c
min
、c
max
分别为单个充电站容量的最小值与最大值,η
min
、η
max
分别为快充桩的最小占比与最大占比,根据各级标准及规划区域设计要求确定具体取值;
[0114]
充电站间距约束为:
[0115]rij
≥r
min
,i≠j;
[0116]
其中,r
ij
为电站网络中充电站i与充电站j之间的直线距离,r
min
为电站网络中充电站i与充电站j之间的最小距离;
[0117]
充电站碳排放配额约束为:
[0118]ce
≤ec;
[0119]
其中,ec为最大碳排放分配额度,各类系数需依据各类标准及不同地域政策进行对应取值。
[0120]
步骤s5:基于多目标函数与约束条件,通过多目标粒子群算法在充电站备选位置坐标集合中对构建的带约束条件的多目标函数进行求解,获取最终选址方案,现有的多目标粒子群算法以及改进的多目标粒子群算法均可应用于本实施例,如图4所示,具体实现过程如下:
[0121]
步骤s51:根据实际地理状况以及步骤s1预测的t年后充电站的保有量n
t
,搜集并输入充电站备选位置坐标集合,在充电站备选位置坐标集合内随机生成若干种充电站网络布局并将其编译为粒子群初始位置,得到初始种群,种群中的每个粒子代表一种充电站网络布局;
[0122]
步骤s52:根据初始种群的支配关系得到初始的精英解集;
[0123]
步骤s53:开始迭代,计算精英解集中的每个粒子在构建的多目标函数中每个目标函数下的拥挤距离,并生成全局最优解集:
[0124][0125][0126]
式中,dist[i]表示粒子i在多目标函数下的拥挤距离,等于粒子i在所有目标函数下的拥挤距离之和,distk[i]表示粒子i在目标函数k下的拥挤距离,fk[i 1]表示粒子i 1在目标函数k下的函数值,fk[i-1]表示粒子i-1在目标函数k下的函数值,通过计算同一目标
函数中每个粒子的前一个粒子和后一个粒子的距离,来比较个体的密集程度,表示第目标函数k的最大值,表示目标函数k的最小值,其中,目标函数k表示多目标函数中的每个目标函数;
[0127]
步骤s54:在全局最优解集中随机选择全局最优解,基于多目标粒子群算法更新粒子群速度和位置,并利用构建的多目标函数与约束条件计算粒子的适应度值;
[0128]
步骤s55:更新每个粒子的个体最优值,并设定小概率接受劣质解,得到更新后的新种群;
[0129]
步骤s56:合并新种群和精英解集后,根据合并所得种群的支配关系更新精英解集,当更新后的精英解集的粒子数大于初始种群时,按照拥挤距离从小到大的顺序对当前精英解集中的粒子进行排序,删除当前精英解集中拥挤距离小的粒子,使当前精英解集的粒子数量与初始种群数相同;
[0130]
步骤s57:判断是否满足终止条件,若达到设定的迭代次数或者适应度值满足要求,则结束迭代,导出精英解集,并画出pareto前沿,获得非支配帕累托最优解集,决策者最终可通过权衡从该非支配帕累托最优解集中获得满意的解;否则,返回步骤s53继续迭代。
[0131]
基于基础的粒子群算法的位置和速度更新公式如下所示:
[0132]
x
i,j
(t 1)=x
i,j
(t) v
i,j
(t 1);
[0133][0134]
式中,i表示粒子代号,j表示粒子维度,本实施例中的同一个粒子需要寻求在环境成本、经济成本、平均路径长度、网络效率四个维度上的优化,x
i,j
(t)表示粒子i在t时刻、维度j上的搜索位置,代表一种充电站网络布局中所有充电站的坐标集合,v
i,j
(t)表示粒子i在t时刻、维度j上的速度,ω表示惯性权重因子,c1、c2为加速系数,即r1,r2服从区间[0,1]上的随机分布,是迭代时粒子i的当前个体最优值,g
best,j
(t)是粒子群当前全体最优值。
[0135]
步骤s54中,可通过基于运动学改进的多目标粒子群算法更新粒子群速度和位置,引入元启发式算法求解目标函数,为解决粒子群存在的易陷入局部最优的问题,基于运动学改进的多目标粒子群算法引入运动学三阶段模型:
[0136][0137][0138][0139]
其中,v表示粒子运动的速度,c为粒子运动的加速度,k表示粒子运动的急动度,将粒子群更新公式中的速度按运动学优化为连续变量,如下式所示:
[0140][0141]
式中,sub和inf分别表示充电站备选位置坐标集合的上下界,表示粒子在t时刻沿局部最优方向的速度分量的导数,表示粒子在t时刻沿全局最优方向的速度分量的导数;此时粒子群的粒子能更连续得在目标空间游历,提升算法搜索广度,有利于找到更优位置,强化求解精确性。
[0142]
本实施例以nguyen-dupuis网络来验证所提出的方法的可行性和有效性。nguyen-dupuis network算例网络由11个节点和17条路段构成,如图5所示,其圆圈内的数字代表节点标号,线段上的数字代表距离。通过如图1所示方法,实施基于多目标粒子群算法的双视角选址方法,以目标函数值作为基于运动学改进的多目标粒子群算法的适应度值,适应度值越低表示越接近目标函数最小化的要求。图6为测试函数使用基础的多目标粒子群算法和基于运动学改进的多目标粒子群算法得出的最优适应度进化过程。从图中可以看出,基础的多目标粒子群算法在迭代次数为8左右时趋于收敛,并过早陷入了局部最优值,而改进的多目标算法在迭代次数为20左右时趋于收敛,适应度远远优于基础的多目标粒子群算法,且在多次对比实验中,大部分时间表现都比基础的多目标粒子群算法优秀。由此,本实施例提出的基于运动学改进的多目标粒子群算法具有全局搜索能力更强、不易陷入局部最优的效能。图7展示了不同寻优次数下充电站网络效率随时间的变化情况,对每次变化进行了归一化处理,当寻优次数逐步增加时,网络效率随失效递减的幅度逐步变缓,网络静动态目标在充电站选址中发挥了作用,依据本实施例的方法获得的充电站选址方案,在实现相近成本目标下能保持更高的效率。
[0143]
以上所述仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进等,均包含在本发明的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。