一种光纤陀螺中防止y波导偏置串扰的调制解调方法
技术领域
1.本发明涉及光纤陀螺技术领域,更具体地,涉及一种光纤陀螺中防止y波导偏置串扰的调制解调方法。
背景技术:
2.由数字闭环陀螺原理可知,陀螺测量系统在输入转速较低的情况下,测量输出会出现比较明显的偏置误差,在接近零输入时甚至会出现测量死区现象。研究表明,通过增加系统噪声的办法可以减小偏置畸变区和测量死区的宽度,所以有人提出通过人为添加周期偏置转速的办法,去消除低转速区的测量死区。然而当实际转速和人为添加的转速大小相等、极性相反时,还是会存在测量畸变甚至出现死区的情况。因此人为添加已知偏置转速的做法并不能根本上解决问题。
3.在数字闭环光纤陀螺的角速率调制解调中,由于传统方波调制会在低转速测量时产生偏置误差,这是因为方波调制时y波导前的驱动电路输出会通过电路板对前端的光电调制器造成串扰,典型的3种现象就是:1、如果输入较小,接近零,则光纤陀螺的输出会显示为零,也就是测量死区;2、当低转速时,从正、负转速两个畸变方向都趋于零,但两个方向的畸变程度不一样;3、低转速时测量输出有明显的偏置误差,且转速越低,误差就越明显。针对上述问题,本发明设计了一种新的调制方法,通过在陀螺传统的调制解调的链路上,并行加入一个有针对性控制的伪随机序列,通过针对性控制的伪随机序列调制解调的偏置方式,对传统调制方式和新方法分别进行matlab软件仿真,可得出运用针对性控制的伪随机调制方法可以有效消除驱动电路输出信号串扰所造成的测试偏置误差,有效解决偏置误差的问题。
技术实现要素:
4.本发明的目的在于提供一种光纤陀螺中防止y波导偏置串扰的调制解调方法,通过针对性控制的伪随机序列调制解调的偏置方式,有效解决偏置误差的问题。
5.为达到上述目的,提供了一种光纤陀螺中防止y波导偏置串扰的调制解调方法,包括以下步骤;
6.使用的光纤陀螺包括调制装置、解调装置和光电探测器;建立序列发生器,使得序列发生器能够在光纤陀螺中向调制装置和解调装置输入伪随机序列;
7.所述序列发生器向调制装置和解调装置输入伪随机序列的具体方法为:
8.(1)定义相关性函数r
rq
(m):
[0009][0010]
其中,r(n)和q(n)为两个随机序列,m∈z,当r(n)=q(n)时,则有
[0011][0012]
由于真随机序列均值为零,且具备连续独立采样的特点,即r(n)的自相关函数可
记为:
[0013][0014]
其中,为高斯噪声;
[0015]
(2)采用数字通信中常用的伪随机序列,在序列发生器的fpga电路中,控制伪随机序列调制解调的响应v如下所示:
[0016][0017]
其中,当干涉相位差为π/2时,光电探测器的输出值为v
π
,φf为反馈相位差,φs为输入相位差,r(n)是伪随机序列;
[0018]
(3)进行matlab仿真,设置光电探测器的串扰强度比值大于0,获得的结果为平滑无节点的曲线则代表没有出现偏置误差;若matlab仿真获得的结果为不平滑无节点的曲线,则代表出现测量死区,需要重新进行向调制装置和解调装置输入伪随机序列的步骤。
[0019]
特别的,所述序列发生器包括若干个触发器和n级寄存器;所述触发器一一连接寄存器。
[0020]
特别的,所述伪随机序列具备以下特征:“1”和“0”在序列中数量一致,“0”比“1”少一个;移位寄存器的级数为n,则序列的周期为2n-1;周期中,有2n-1游程,其中i 1游程次数比i的游程数少一倍;其自相关函数记为:
[0021][0022]
特别的,所述伪随机码采用15级伪随机码,所述伪随机码的多项式f(x)为
[0023]
f(x)=x
15
x
14
1(6),x为随机码。
[0024]
特别的,所述步骤(3)进行matlab仿真所使用的装置包括光源、光电探测器、耦合器、运放ad、信号处理器、运放、da运放、y波导;所述光源连接耦合器;所述光电探测器分别连接耦合器和运放ad;所述运放ad连接信号处理器;所述信号处理器分别连接运放和da运放;所述运放和da运放分别连接y波导;所述y波导连接耦合器;所述信号处理器用于输出闭环式光纤陀螺信号。
[0025]
特别的,所述步骤(3)进行matlab仿真所使用的装置还包括光纤环;所述光纤环连接y波导。
[0026]
特别的,所述步骤(3)中,设置光电探测器的串扰强度比值为0.02。
[0027]
特别的,所述步骤(3)中,获得的结果为平滑无节点的曲线为三角函数曲线。
[0028]
本发明的技术效果如下所示:
[0029]
本发明可有效解决传统方波调制的数字闭环光纤陀螺在低转速测量时的偏置误差问题,大大提高了陀螺的测量动态,提高了在低转速区间的精度,进而大大提高了陀螺的适用性。
附图说明
[0030]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本
发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0031]
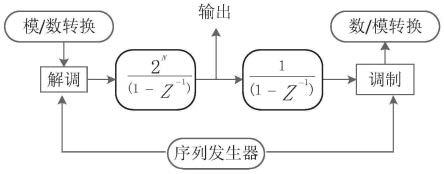
图1为本发明实施例的调制解调原理图;
[0032]
图2为本发明实施例进行matlab仿真所使用的装置的结构图;
[0033]
图3为本发明实施例进行matlab仿真所使用的装置对陀螺在z域上建立相应的测试模型;
[0034]
图4为本发明实施例伪随机序列生成器逻辑示意图;
[0035]
图5为当光电探测器没有受到后端电路的串扰时的仿真结果图。
[0036]
图6为当gd=0.001,采用现有技术的仿真结果图。
[0037]
图7为当gd=0.002,采用本发明实施例方法的仿真结果图。
具体实施方式
[0038]
下面结合附图对本发明的优选实施例进行详细阐述,以使本发明的优点和特征能更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
[0039]
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
[0040]
需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
[0041]
此外,术语“水平”、“竖直”、“悬垂”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
[0042]
本发明实施例实物测试的地点为广西桂林,纬度约为北纬25
°
。测试时陀螺固定在测试转台的台面上,测试轴垂直于地平面(与转台转动轴平行)。由于地球自转角速度约为15.04
°
/h,所以当转台以恒定的速度转动时,理论上陀螺的测量输出最大幅度约为13.6
°
/h(15.04*cos25
°
),且输出曲线为三角函数曲线。
[0043]
如图1所示,本发明实施例一种光纤陀螺中防止y波导偏置串扰的调制解调方法,包括以下步骤;
[0044]
使用的光纤陀螺包括调制装置、解调装置和光电探测器;建立序列发生器,使得序列发生器能够在光纤陀螺中向调制装置和解调装置输入伪随机序列;
[0045]
如图2所示,本发明实施例进行matlab仿真所使用的装置包括光源、光电探测器、耦合器、运放ad、信号处理器、运放、da运放、y波导、光纤环。光源连接耦合器。光电探测器分别连接耦合器和运放ad.运放ad连接信号处理器。信号处理器分别连接运放和da运放。运放和da运放分别连接y波导。y波导连接耦合器。信号处理器用于输出闭环式光纤陀螺信号。光纤环连接y波导。
[0046]
如图3所示,为依据上述装置对陀螺在z域上建立相应的测试模型,图中,y波导等
效为差分模型,g1、g2分别是正向增益和反向增益,gd表示y波导驱动电路对前端光电探测器的串扰强度比值,1/z为信号处理板等效模型中的延时器,data_f是信号处理寄存器中的转速相位数值,φf是陀螺的输出。modu和d_modu表示信号处理等效模型中的调制解调环节。
[0047]
如图4所示,本发明实施例的序列发生器包括若干个触发器和n级寄存器。触发器一一连接寄存器。
[0048]
序列发生器向调制装置和解调装置输入伪随机序列的具体方法为:
[0049]
(1)定义相关性函数r
rq
(m):
[0050][0051]
其中,r(n)和q(n)为两个随机序列,m∈z,当r(n)=q(n)时,则有
[0052][0053]
由于真随机序列均值为零,且具备连续独立采样的特点,即r(n)的自相关函数可记为:
[0054][0055]
其中,为高斯噪声;
[0056]
(2)采用数字通信中常用的伪随机序列,在序列发生器的fpga电路中,控制伪随机序列调制解调的响应v如下所示:
[0057][0058]
其中,当干涉相位差为π/2时,光电探测器的输出值为v
π
,φf为反馈相位差,φs为输入相位差,r(n)是伪随机序列;
[0059]
本发明实施例的伪随机码采用15级伪随机码,伪随机码的多项式f(x)为
[0060]
f(x)=x
15
x
14
1(6),x为随机码。
[0061]
伪随机序列具备以下特征:“1”和“0”在序列中数量一致,“0”比“1”少一个;移位寄存器的级数为n,则序列的周期为2n-1;周期中,有2n-1游程,其中i 1游程次数比i的游程数少一倍;其自相关函数记为:
[0062][0063]
(3)进行matlab仿真,设置光电探测器的串扰强度比值大于0,获得的结果为平滑无节点的曲线则代表没有出现偏置误差;若matlab仿真获得的结果为不平滑无节点的曲线,则代表出现测量死区,需要重新进行向调制装置和解调装置输入伪随机序列的步骤。获得的结果为平滑无节点的曲线为三角函数曲线。
[0064]
现有技术采用传统方波调制方式的情况进行仿真,根据前面陀螺的理论输出最大值为13.6
°
/h,则仿真测试输入设为最大幅度为14lsb的三角函数信号,而令gd=0,即模拟y波导驱动电路没有对光电探测器造成串扰的情况。则陀螺系统的测试跟踪效果图(测试点为图3中的a点)如图5所示,测试点c处的累加器输出后的结果如图4所示。
[0065]
由图可知,在仿真模型中,当光电探测器没有受到后端电路的串扰时(gd=0),陀
螺系统能准确跟踪输入信号,且没有产生任何偏置误差畸变。然而,陀螺系统中,y波导驱动电路输出的信号量级都在伏(v)级,而光电探测器输出的有用信号都在毫伏(mv)量级,故在实际的产品设计中,y波导驱动电路对光电探测器的串扰很难完全滤除,所以,仿真陀螺系统时,设gd=0.001,即在测试系统中加入了串扰的影响,仿真结果如图6所示。
[0066]
由仿真结果可知,对比图5和图6,采用现有技术的方波调制方式的陀螺系统会产生偏置误差,出现测量死区。
[0067]
而使用本发明上述方法,设置光电探测器的串扰强度比值gd为0.02(大于方波仿真时的串扰强度gd=0.001),仿真结果如图7所示,获得的结果为平滑无节点的曲线则代表没有出现偏置误差,相较图5和图6,说明使用本发明实施例的方法,在串扰强度更强的情况下,仍然能够有效解决偏置误差的问题。
[0068]
虽然结合附图描述了本发明的实施方式,但是专利所有者可以在所附权利要求的范围之内做出各种变形或修改,只要不超过本发明的权利要求所描述的保护范围,都应当在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。