技术特征:
1.一种基于贝塞尔曲线的起重机定位防摇轨迹平滑方法,其特征在于,包括以下步骤:步骤1:根据拉格朗日方程构建起重机动力学模型,并分析模型特性;步骤2:根据起重机动力学模型,选取参考的连续运动轨迹和离散运动轨迹,并分别用贝塞尔曲线进行平滑处理;步骤3:根据贝塞尔曲线平滑处理的原理,进行软件和硬件设计,主要包括数据收发层和数据处理层的协议和调用函数、硬件选型和接口设计。2.根据权利要求1所述的一种基于贝塞尔曲线的起重机定位防摇轨迹平滑方法,其特征在于,步骤1中,所研究的对象选为二维桥式起重机动力学模型,所述起重机动力学模型表达式如下:q=(x l θ)
tt
g(q)=(0-mgcosθmglsinθ)
t
τ=(f
x
f
l
0)
t
其中,m(q)为二维桥式起重机系统的惯量矩阵,c(q,q)为柯氏力矩阵,g(q)为重力因子向量,τ为控制输入向量,q为起重机系统的状态向量,x为行车位移距离,l为负载到小车间的绳长,θ为负载摆动角度,g为重力加速度,μ
x
为水平运动的摩擦系数,μ
l
为提升运动的摩擦系数,f
x
为行车水平运动的控制驱动力,f
l
为绳子提升的拉力。3.根据权利要求1所述的一种基于贝塞尔曲线的起重机定位防摇轨迹平滑方法,其特征在于,步骤2中,选取的基于相平面分析的起重机系统三段式运行轨迹为:选取的基于相平面分析的起重机系统三段式运行轨迹为:选取的基于相平面分析的起重机系统三段式运行轨迹为:
其中,v(t)为桥式起重机系统中行车的速度,a
max
为行车规定的最大加速度,t为起重机从运行到停止的总时间,t
a
为起重机运行的加速段和减速段的时间,二者时间相等,t
c
为起重机运行的恒速段的时间,x
d
为行车位移距离,ω
n
为负载摆动频率。4.根据权利要求1所述的一种基于贝塞尔曲线的起重机定位防摇轨迹平滑方法,其特征在于,步骤2中,选取的基于分段轨迹规划的起重机系统五段式运行轨迹为:迹规划的起重机系统五段式运行轨迹为:迹规划的起重机系统五段式运行轨迹为:迹规划的起重机系统五段式运行轨迹为:迹规划的起重机系统五段式运行轨迹为:t4=t1其中,v(t)为桥式起重机系统中行车的速度,ω
n
为负载摆动频率,v
max
为行车规定的最大速度,v
min
为行车运行的制动速度,a0为求得对应的行车运行的最大加速度,t1为起重机运行的加速段的时间,t2为起重机运行的高速恒速段的时间,t3为起重机运行的高速减速段的时间,t4为起重机运行的制动恒速段的时间,t5为起重机运行的制动减速段的时间,其中t1、t4相等,s1、s3、s4、s5分别为对应时间段起重机运行的距离,x
d
为行车位移距离。5.根据权利要求1所述的一种基于贝塞尔曲线的起重机定位防摇轨迹平滑方法,其特征在于,步骤2中,使用贝塞尔曲线对起重机运行轨迹优化,其原理为:二阶贝塞尔曲线ac由数据点a和c、控制点b来描述曲线状态,用直线连接ab、bc,并在ab上取d,在bc上取e,用直线连接de,并在de上取f,使e、f满足:当d点从a点运动到b点时,f点从a点运动到c点,f点的运动轨迹即为贝塞尔曲线。
6.根据权利要求1所述的一种基于贝塞尔曲线的起重机定位防摇轨迹平滑方法,其特征在于,步骤2中,对于连续的起重机运行轨迹,规定贝塞尔曲线的处理方式为:对连续运行轨迹作平滑处理,连续运行轨迹由分段函数表达式组成,三段分段函数的表达式为:且f1(0)=0,f1(a)=f2(a),f2(b)=f3(b),其中,需要平滑处理的各个分段点为x1=0,x2=a,x3=b;令平滑处理区间长度d为单位横坐标,以点x1为例,需要在该点左侧选取一点x
1s
,右侧选取一点x
1e
,使其满足:x
1s
d=x
1e
,d=1d=1d=1其中,l
x1sx1
、l
x1ex1
分别为x
1s
、x
1e
到x1的距离,二者相等;对每个分段点平滑处理之后,得到的分段函数表达式为:其中,x
2s
、x
2e
为点x2=a左右两侧选取的点,x
3s
、x
3e
为点x3=b左右两侧选取的点,bezier(x)为生成的贝塞尔曲线。7.根据权利要求1所述的一种基于贝塞尔曲线的起重机定位防摇轨迹平滑方法,其特征在于,步骤2中,对于离散的起重机运行轨迹,规定贝塞尔曲线的处理方式为:对离散运行轨迹作平滑处理,离散运行轨迹由多组点的横纵坐标组成,按横坐标等距离散的三段分段函数的表达式为:p
n
=(x
n
,y
n
)x
n
=nt,n∈n
*
y
n
=f(x
n
)
其中,p
n
为轨迹上的点,x
n
、y
n
为该点横纵坐标,t为采样周期,f(x)为连续函数表达式;给出离散函数表达式上的手动控制点x0=0,x
a
=a,x
b
=b,在采样周期t=20ms下,平滑处理区间长度n
d
为50,以点x
a
为例,则有:x
as
=x
(a-25)
x
ae
=x
(a 25)
其中,x
as
、x
ae
为点x
a
左右两侧贝塞尔曲线的起点和终点,给出两侧点后,对起点到终点的51个点之间作平均插值处理,以x
as
到x
a
之间的插值点为例,有:有:
……
插值完毕后,对照二阶贝塞尔曲线原理,x
as
即为a的移动轨迹,x
a
即为b的移动轨迹,x
ae
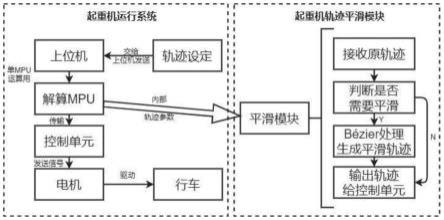
即为c的移动轨迹,x(a-24.5)到x(a-0.5)即为d的移动轨迹,x(a 0.5)到x(a 24.5)即为e的移动轨迹,则可求得平滑处理后的点序列f。8.根据权利要求1所述的一种基于贝塞尔曲线的起重机定位防摇轨迹平滑方法,其特征在于,步骤3中,所述平滑模块的软件设计包括数据收发层、处理层的协议和调用函数、硬件选型和接口设计,其中:软件设计的数据收发层的协议定义数据类型的组成为:包起始、模式段、数据段、ack段、包结束,其中:所述包起始,用于表明该数据包为给平滑模块处理的数据类型;所述模式段紧接在包起始之后,用于表明该段设置平滑模块处理数据的模式类型;所述数据段接在模式段之后,包含轨迹参数数据;所述ack段,用于通知发送端和接收端发出应答信号,两端口数据传输结束;所述包结束,用于表明该平滑模块的数据包传输结束;软件设计的数据处理层的协议定义起重机轨迹平滑处理在程序上的过程,分为:模块和片上外设初始化;为主要参数分配内存;根据sm_sr状态寄存器选择平滑函数的处理方式;从sm_rdr读轨迹参数,完成平滑处理;写sm_tdr,等待发送。9.根据权利要求1所述的一种基于贝塞尔曲线的起重机定位防摇轨迹平滑方法,其特征在于,步骤3中,所述平滑模块的硬件设计包括:根据软件设计,所选型的硬件需要具有如下功能:支持运算和逻辑控制的运算器或cpu;不少于8个、可用于模拟接口的i/o口;
3个数据寄存器sm_sr、sm_rdr、sm_tdr;数据存储器ram;1个可编程定时器;根据软件设计和硬件选型,规定接口通信方式:当平滑处理单元与上位机通信时:当使用以太网接口通信时,需要在mcu端的gpio端口外接rs232接口;当使用usb接口通信时,需要在mcu端的uart口外接ch340c芯片;当平滑处理单元与控制单元通信时:常用的传输数据到控制单元的通信协议有iic、can,这些通信协议均可以在平滑处理单元用io口模拟。
技术总结
本发明公开了一种基于贝塞尔曲线的起重机定位防摇轨迹平滑方法,包括:通过解拉格朗日动力学方程,求解起重机数学模型,进行特性分析;对于常用的起重机定位防摇运动轨迹包括离散运动轨迹和连续运动轨迹,基于贝塞尔曲线进行平滑处理,提高速度的平滑性;根据贝塞尔平滑原理,设计起重机运动轨迹平滑模块进行软件设计和硬件选型,自定义数据收发和处理的协议和调用函数,选择硬件设备型号和自定义硬件接口。该发明解决了不平滑轨迹对起重机机械的冲击力造成的控制性能下降、影响起重机寿命的问题。问题。问题。
技术研发人员:马向华 陆海舟 许敏 陈浩
受保护的技术使用者:无锡安起科技有限公司
技术研发日:2022.09.30
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。