1.本发明涉及测距校准领域,更具体的说,它涉及一种激光测距校准方法。
背景技术:
2.激光测距是目前在各大领域都比较常用的非接触式距离测量方法,通过光的反射及经过时间计算测量距离。目前比较常用的激光测距方式包括脉冲式激光测距和相位式激光测距,其中相位式激光测距是通过将调制好频率的激光在光路往返过中的相位变化,间接获取经过时间,实现激光测距。
3.目前的激光测距,由于激光测距仪内部的问题,例如调制频率的不稳定,外部环境的影响,例如空气折射率,使得激光测距存在一定的误差,所以在进行激光测距时,需要对激光测距仪进行校准,但是每次测距前都手动进行校准,比较繁琐。
技术实现要素:
4.为了解决目前的激光测距每次测距前都手动进行校准,比较繁琐的缺点,本发明提供一种激光测距校准方法,通过使用较高频率以及预设距离自动计算对激光测距进行校准,使用方便,并且校准精确度高;
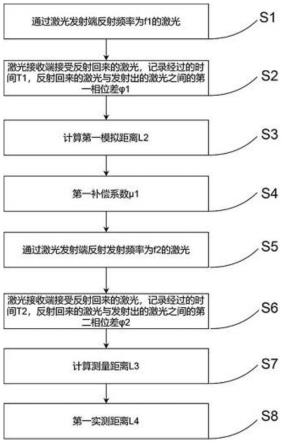
5.为实现上述技术方案,本发明提供一种激光测距校准方法,包括如下步骤:
6.s1:通过激光发射端反射频率为f1的激光,开始进行计时,激光在距离第一预设距离l1的反射镜处进行发射;
7.s2:激光接收端接受反射回来的激光,记录经过的时间t1,反射回来的激光与发射出的激光之间的第一相位差φ1;
8.s3:通过经过的时间t1,反射回来的激光与发射出的激光之间的第一相位差φ1、频率f1和光速c计算第一模拟距离l2;
9.s4:计算第一补偿系数μ1=l2/l1,补偿系数μ用于对激光测距进行校准;
10.s5:通过激光发射端反射发射频率为f2的激光,开始进行计时,激光在目标距离的物体处反射;
11.s6:激光接收端接受反射回来的激光,记录经过的时间t2,反射回来的激光与发射出的激光之间的第二相位差φ2;
12.s7:通过经过的时间t2,反射回来的激光与发射出的激光之间的第二相位差φ2、频率f2和光速c计算测量距离l3;
13.s8:计算第一实测距离l4=l3/μ1,对激光测距的校准。
14.作为本发明的一个优选,进一步地的校准方法包括如下步骤:
15.a1:通过激光发射端反射频率为f3的激光,开始进行计时,激光在距离第二预设距离l5的反射镜处进行发射;
16.a2:激光接收端接受反射回来的激光,记录经过的时间t3,反射回来的激光与发射出的激光之间的第二相位差φ3;
17.a3:通过经过的时间t3,反射回来的激光与发射出的激光之间的第二相位差φ3、频率f3和光速c计算第二模拟距离l6;
18.a4:计算第二补偿系数μ2=(l6-l2)/(l5-l1),计算偏移量δ=l2-μ2*l1,第二补偿系数μ2和偏移量δ用于实现对激光测距的进一步校准;
19.a5:进行s5至s7,获取测量距离l3;
20.a6:计算第二实测距离l7=(l3-δ)/μ2,进一步对激光测距的校准。
21.作为本发明的一个优选,还包括对激光测距的预设校准,具体步骤如下:
22.b1:生成补偿常数数据库
23.b1.1:设定环境条件数值p1,环境条件数值p1包括温度数值、湿度数值和空气折射率;
24.b1.2:根据设定的环境条件数值p1,在密闭空间内部设计对应的环境;
25.b1.3:设定目标距离为l8,在密闭空间中离激光发射端l8的位置处设置放射镜,进行a1至a6,获取第二实测距离l7;
26.b1.4:计算补偿常数α=(l8-l7)/l7,并将补偿常数α和对应的环境条件数值p1一一映射存储在数据库中;
27.b1.5:重复步骤b1.2至b1.4,生成补偿常数数据库;
28.b2:对激光测距进行预设校准
29.b2.1:进行a1至a6,获取第二实测距离l7;
30.b2.2:获取当前环境条件数值p2,将当前环境条件数值p2与补偿常数数据库中的环境条件数值p1进行遍历匹配,获取对应的补偿常数α;
31.b2.3:计算第三实测距离l9=l7*(1 α),对激光测距进行预设校准。
32.作为本发明的一个优选,采用的激光测距方法为相位式激光测距技术。
33.作为本发明的一个优选,进行激光测距采用的激光测距仪内部设置恒温装置和气温补偿装置。
34.作为本发明的一个优选,激光测距的精度到达0.001m-0.005m。
35.作为本发明的一个优选,频率f1和f3的范围为500mhz-1500mhz。
36.作为本发明的一个优选,在激光测距时,针对不同目标距离选择对应的频率f2。
37.本发明具有以下优点:
38.1、本发明通过高频率f1和第一预设距离l1计算第一补偿系数μ1,对激光测距时进行校准,消除相对误差的影响,提升激光校准时的精度。
39.2、本发明通过计算第二补偿系数μ2,能够消除除开固定误差的相对误差的影响,通过偏移量δ,消除固定误差的影响,通过第二补偿系数μ2和偏移量δ对第二实测距离的修正,进一步提升激光测距的精准度。
40.3、本发明通过在实测环境条件数值的环境下,模拟激光测距,计算补偿常数α,使得计算第三实测距离时,根据当前环境条件数值获取对应补偿常数α,对第三实测距离进行修正,进一步提升激光测距的精度。
附图说明
41.图1为本发明采用的激光测距校准方法的流程示意图。
42.图2为本发明采用的对激光测距进一步校准的流程示意图。
具体实施方式
43.为了使本技术领域的人员更好地理解本发明中的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
44.实施例1
45.一种激光测距校准方法,采用的激光测距方法为相位式激光测距技术;
46.一种激光测距校准方法,如图1所示,包括如下步骤:
47.s1:通过激光发射端反射频率为f1的激光,开始进行计时,激光在距离第一预设距离l1的反射镜处进行发射,l1默认为20cm,反射镜可以设置在激光测距仪内,无需人为在远处设置反射镜,使用方便;
48.s2:激光接收端接受反射回来的激光,记录经过的时间t1,反射回来的激光与发射出的激光之间的第一相位差φ1;
49.s3:通过经过的时间t1,反射回来的激光与发射出的激光之间的第一相位差φ1、频率f1和光速c计算第一模拟距离l2;
50.s4:计算第一补偿系数μ1=l2/l1,补偿系数μ用于对激光测距进行校准,由于标定的光速c,调制频率和温度数值在不同环境下具有不同的值,存在相对误差,通过第一补偿系数μ1的校准,使得进行激光测距时消除相对误差的影响;
51.s5:通过激光发射端反射发射频率为f2的激光,开始进行计时,激光在目标距离的物体处反射,在激光测距时,针对不同目标距离选择对应的频率f2;
52.s6:激光接收端接受反射回来的激光,记录经过的时间t2,反射回来的激光与发射出的激光之间的第二相位差φ2;
53.s7:通过经过的时间t2,反射回来的激光与发射出的激光之间的第二相位差φ2、频率f2和光速c计算测量距离l3,相位式激光测距采用的公式如下:
[0054][0055]
其中c/2f2为测尺,n为整尺数,δn为余尺;
[0056]
由于测尺中的频率f2影响激光测距的精度,当f2较大时,测尺会较小,测尺精度会提高,但是由于n的不确定,使得测量距离l3不确定;当f2较小时,使得测尺长度刚好大于目标距离,这时n值能够确定,但是测量精度会降低,所以目前一般采用高频率和低频率配合进行激光测距,其中高频率f2便可作为频率f1,对激光测距进行校准,无需对现有的激光测距仪进行大幅度改动,也能够使得操作人员更快接受这一校准方法;
[0057]
s8:计算第一实测距离l4=l3/μ1,对激光测距的校准。
[0058]
本发明通过高频率f1和第一预设距离l1计算第一补偿系数μ1,对激光测距时进行校准,消除相对误差的影响,提升激光校准时的精度。
[0059]
实施例2
[0060]
如图2所示,进一步地的校准方法包括如下步骤:
[0061]
a1:通过激光发射端反射频率为f3的激光,开始进行计时,激光在距离第二预设距离l5的反射镜处进行发射,l2默认为30cm,反射镜可以设置在激光测距仪内,无需人为在远处设置反射镜,使用方便;
[0062]
a2:激光接收端接受反射回来的激光,记录经过的时间t3,反射回来的激光与发射出的激光之间的第二相位差φ3;
[0063]
a3:通过经过的时间t3,反射回来的激光与发射出的激光之间的第二相位差φ3、频率f3和光速c计算第二模拟距离l6;
[0064]
a4:计算第二补偿系数μ2=(l6-l2)/(l5-l1),计算偏移量δ=l2-μ2*l1,第二补偿系数μ2和偏移量δ用于实现对激光测距的进一步校准,进入s5,由于激光测距仪内部器件的损耗,测向常数的不同,存在固定误差,通过计算第二补偿系数μ2,能够消除除开固定误差的相对误差的影响,通过偏移量δ,消除固定误差的影响,进一步提升激光测距的精准度;
[0065]
s5:通过激光发射端反射发射频率为f2的激光,开始进行计时,激光在目标距离的物体处反射,在激光测距时,针对不同目标距离选择对应的频率f2;
[0066]
s6:激光接收端接受反射回来的激光,记录经过的时间t2,反射回来的激光与发射出的激光之间的第二相位差φ2;
[0067]
s7:通过经过的时间t2,反射回来的激光与发射出的激光之间的第二相位差φ2、频率f2和光速c计算测量距离l3,相位式激光测距采用的公式如下:
[0068][0069]
其中c/2f2为测尺,n为整尺数,δn为余尺;
[0070]
由于测尺中的频率f2影响激光测距的精度,当f2较大时,测尺会较小,测尺精度会提高,但是由于n的不确定,使得测量距离l3不确定;当f2较小时,使得测尺长度刚好大于目标距离,这时n值能够确定,但是测量精度会降低,所以目前一般采用高频率和低频率配合进行激光测距,其中高频率f2便可作为频率f1,对激光测距进行校准,无需对现有的激光测距仪进行大幅度改动,也能够使得操作人员更快接受这一校准方法,进入a6;
[0071]
a6:计算第二实测距离l7=(l3-δ)/μ2,进一步对激光测距的校准。
[0072]
本发明通过计算第二补偿系数μ2,能够消除除开固定误差的相对误差的影响,通过偏移量δ,消除固定误差的影响,通过第二补偿系数μ2和偏移量δ对第二实测距离的修正,进一步提升激光测距的精准度。
[0073]
实施例3
[0074]
一种激光测距校准方法,还包括对激光测距的预设校准,具体步骤如下:
[0075]
b1:生成补偿常数数据库
[0076]
b1.1:设定环境条件数值p1,环境条件数值p1包括温度数值、湿度数值和空气折射率,其中环境条件数值p1由人为进行设定;
[0077]
b1.2:根据设定的环境条件数值p1,在密闭空间内部设计对应的环境;
[0078]
b1.3:设定目标距离为l8,在密闭空间中离激光发射端l8的位置处设置放射镜,进入a1;
[0079]
a1:通过激光发射端反射频率为f3的激光,开始进行计时,激光在距离第二预设距
离l5的反射镜处进行发射;
[0080]
a2:激光接收端接受反射回来的激光,记录经过的时间t3,反射回来的激光与发射出的激光之间的第二相位差φ3;
[0081]
a3:通过经过的时间t3,反射回来的激光与发射出的激光之间的第二相位差φ3、频率f3和光速c计算第二模拟距离l6;
[0082]
a4:计算第二补偿系数μ2=(l6-l2)/(l5-l1),计算偏移量δ=l2-μ2*l1,第二补偿系数μ2和偏移量δ用于实现对激光测距的进一步校准,进入s5;
[0083]
s5:通过激光发射端反射发射频率为f2的激光,开始进行计时,激光在目标距离的物体处反射;
[0084]
s6:激光接收端接受反射回来的激光,记录经过的时间t2,反射回来的激光与发射出的激光之间的第二相位差φ2;
[0085]
s7:通过经过的时间t2,反射回来的激光与发射出的激光之间的第二相位差φ2、频率f2和光速c计算测量距离l3,进入a6;
[0086]
a6:计算第二实测距离l7=(l3-δ)/μ2,进一步对激光测距的校准,进入b1.4;
[0087]
b1.4:计算补偿常数α=(l8-l7)/l7,并将补偿常数α和对应的环境条件数值p1一一映射存储在数据库中,由于空气折射率的影响,激光在传播过程中会存在误差,并且此误差和距离成正比,为了更高精度,通过在实测的环境条件数值对应的环境下,计算补偿常数,消除激光在传播过程的误差,进一步提升激光测距的精准度;
[0088]
b1.5:重复步骤b1.2至b1.4,生成补偿常数数据库;
[0089]
b2:对激光测距进行预设校准
[0090]
b2.1:进入a1;
[0091]
a1:通过激光发射端反射频率为f3的激光,开始进行计时,激光在距离第二预设距离l5的反射镜处进行发射;
[0092]
a2:激光接收端接受反射回来的激光,记录经过的时间t3,反射回来的激光与发射出的激光之间的第二相位差φ3;
[0093]
a3:通过经过的时间t3,反射回来的激光与发射出的激光之间的第二相位差φ3、频率f3和光速c计算第二模拟距离l6;
[0094]
a4:计算第二补偿系数μ2=(l6-l2)/(l5-l1),计算偏移量δ=l2-μ2*l1,第二补偿系数μ2和偏移量δ用于实现对激光测距的进一步校准,进入s5;
[0095]
s5:通过激光发射端反射发射频率为f2的激光,开始进行计时,激光在目标距离的物体处反射;
[0096]
s6:激光接收端接受反射回来的激光,记录经过的时间t2,反射回来的激光与发射出的激光之间的第二相位差φ2;
[0097]
s7:通过经过的时间t2,反射回来的激光与发射出的激光之间的第二相位差φ2、频率f2和光速c计算测量距离l3,进入a6;
[0098]
a6:计算第二实测距离l7=(l3-δ)/μ2,进一步对激光测距的校准,进入b2.2;
[0099]
b2.2:获取当前环境条件数值p2,将当前环境条件数值p2与补偿常数数据库中的环境条件数值p1进行遍历匹配,获取对应的补偿常数α;
[0100]
b2.3:计算第三实测距离l9=l7*(1 α),对激光测距进行预设校准。
[0101]
作为本发明的一个优选,进行激光测距采用的激光测距仪内部设置恒温装置和气温补偿装置。
[0102]
本发明通过在实测环境条件数值的环境下,模拟激光测距,计算补偿常数α,使得计算第三实测距离时,根据当前环境条件数值获取对应补偿常数α,对第三实测距离进行修正,进一步提升激光测距的精度。
[0103]
作为本发明的一个优选,激光测距的精度到达0.001m-0.005m。
[0104]
作为本发明的一个优选,频率f1和f3的范围为500mhz-1500mhz。
[0105]
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。本说明书中未作详细描述的部分属于本领域专业技术人员公知的现有技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。