1.本发明属于核聚变真空检漏技术领域,具体涉及一种用于聚变装置的机械臂检漏系统及方法。
背景技术:
2.随着科学技术的进步,某些用途的真空装置向大型化,高真空度的方向发展。在宇航模拟、国防科技、核电及高能物理等领域,许多真空容器容积在几百至几千立方米,真空度可达到高真空甚至超高真空。检漏是真空获得的一个重要步骤,对于危及人员安全的高危环境,或者结构复杂而不能停机的情况,无法按照目前常规做法逐个漏孔实施检漏。在检漏过程中同时控制检漏仪及附属喷枪,及时观察漏率变化、数据分析以及反馈操作等,往往同时需要多个操作人员分工协作,大大降低了测量的效率和精度。
3.east装置是我国自行设计研制的国际首个全超导托卡马克装置,east装置的主机部分高11米,直径8米,重400吨,由超高真空室、纵场线圈、极向场线圈、内外冷屏、外真空杜瓦、支撑系统等六大部件组成。其实验运行需要有大规模低温氦制冷、大型高功率脉冲电源及其回路、大型超导体测试、大型计算机控制和数据采集处理、兆瓦级低杂波电流驱动和射频波加热、大型超高真空、以及多种先进诊断测量等系统支撑。在聚变装置真空室的制造、窗口设备安装、及装置实验过程,由于真空室壳体材料的缺陷、窗口设备的安装偏差、实验中电磁力或等离子体破裂的影响会造成真空室本体及连接组件出现微小漏气点,这直接会影响聚变装置正常的等离子体放电实验,造成聚变装置停止运行。如果漏气点不断增大,将会对聚变装置周围的真空设备及诊断设备造成物理性破坏。因而发展与运用有效的真空检漏系统与检漏方法是当前托卡马克等离子体工程研究的重点之一。
4.为保证未来聚变反应装置要保证长时间安全地运行,需要提供一种适用于核聚变反应装置的真空氦检漏工具及方法,以解决现有技术存在的不足。
技术实现要素:
5.针对现有技术中存在的上述不足之处,本发明提供一种用于聚变装置的机械臂检漏系统及方法,用以解决现有检漏方法无法满足未来核聚变装置泄漏检测的新需求。本发明应用于聚变装置运行过程中真空泄漏的检测与精准定位:通过四极质谱计实时检测真空室和真空管道中气体成分变化情况,信号处理系统接收质谱计传输的信号,进行泄漏判断,若判断真空室或真空管道发生外部空气泄漏,利用机械臂进行检漏,检漏工作人员控制机械臂,通过机械臂影像系统定点检测机械臂可移动范围内的法兰、焊缝和管道的外部空气泄漏,通过影像系统实时观察现场画面,控制机械臂对泄漏的大致范围进行定点氦气喷吹,再利用氦质谱检漏仪确定泄漏位置及漏率的大小。利用本发明来替代人工检漏的方法,大大提高了检漏效率,降低了核环境下工作人员的暴露风险,保证了检漏工作人员的安全性。
6.为了实现上述目的,本发明采用了如下技术方案:
7.一种用于聚变装置的机械臂检漏系统,包括控制系统、信号处理系统、真空辅助系
统、四极质谱计、氦质谱检漏仪及六自由度机械臂;所述控制系统通过有线方式连接信号处理系统、真空辅助系统、四极质谱计、氦质谱检漏仪及六自由度机械臂;
8.所述六自由度机械臂具有影像系统和氦气喷吹系统;影像系统中的2d相机安装在机械臂前端,用于法兰、焊缝或管道泄漏的位置定位;所述氦气喷吹系统包括喷吹管道、电控阀门和氦气瓶;氦气瓶为检漏提供氦气;电控阀门一端与喷吹管道连接安装于机械臂上,另一端与氦气输送管道连接并远程控制氦气喷吹流量的大小;
9.所述检漏系统利用四极质谱计进行初步的泄漏检测,并利用氦质谱检漏仪准确的泄漏检测,四极质谱计通过分析真空室中的残余气体的质谱图来确定是否有漏孔,氦质谱检漏仪工作在进行检漏期间,在机械臂喷吹氦气之后,实时测绘真空室内氦气压强曲线,并指示出被喷吹氦气的位置是否出现泄漏及漏孔的漏率;
10.所述信号处理系统用于接收四极质谱计传输过来的质谱数据,进行数据分析,若发生泄漏,则将分析推测的结果传送给用户端以指导工作人员进行检漏和对漏缝应急处理;
11.所述真空辅助系统通过真空管道和阀门对聚变装置进行抽真空,保证聚变装置正常运行所需真空状态;
12.所述控制系统用于进行远程监控,为数据交互提供集成的控制平台及接口,以便实现六自由度机械臂的远程检漏工作。
13.进一步地,所述真空室为全超导托卡马克聚变装置,用于聚变实验,16个大型“d”形超导纵场磁体产生纵场强度bt=3.5t;12个大型极向场超导磁体提供磁通变化δф≥10伏秒;通过这些极向场超导磁体,将能产生大于或等于100万安培的等离子体电流;持续时间达到1000秒,在高功率加热下温度超过一亿度。
14.进一步地,所述聚变装置连接有真空管道,所述氦质谱检漏仪安装于真空管道上;真空管道和阀门用于真空室获得超高真空环境气体的传输管道,通过其进行气体释放。
15.进一步地,所述四极质谱计对真空室和真空管道的气体成分及其分压实时监测,了解真空室和真空管道的真空状态,判断是否发生泄漏。
16.本发明提供一种用于聚变装置的机械臂检漏系统的检漏方法,包括如下步骤:
17.步骤1、首先在聚变装置运行时,通过控制系统控制各子系统运行状态;
18.步骤2、通过四极质谱计对真空室和真空管道的气体成分及其分压实时监测,并将采集到信息发送给信号处理系统,观察是否出现气体压强大范围变化及气体成分进行泄漏判断;
19.步骤3、当聚变装置发生泄漏时,通过信号处理系统分析,若泄漏发生在外部空气泄漏,控制六自由度机械臂进行远程检漏;
20.步骤4、控制六自由度机械臂,利用六自由度机械臂的影像系统,对当前六自由度机械臂可移动范围内的法兰、焊缝或真空管道进行定点泄漏检测,控制六自由度机械臂上的电控阀门对泄漏范围进行氦气喷吹;
21.步骤5、喷吹预定时间后,利用氦质谱检漏仪指示出被检测位置是否存在泄漏及漏孔的漏率,若出现泄漏,氦质谱检漏仪中氦曲线上升,漏率值增大;
22.步骤6、检漏过程中监测的质谱数据也会被送到信号处理系统进行分析处理,评估泄漏情况以及泄漏对装置运行的危险性,并给出应急的解决方案,指导工作人员对漏点进
行可靠的处理。
23.本发明的有益效果为:
24.1、本发明可进行远程检漏,提高了检漏工作人员的安全性以及检漏效率;
25.2、本发明采用电力驱动,不会对真空环境造成污染;
26.3、本发明根据利用机械臂进行远程检漏,避免了检测物必须手动放置到检测器前检测的问题,提高了工作效率,增加了装置的适用性;
27.4、本发明在聚变装置的运行状态下也可正常工作,为未来聚变堆的检漏提供了一种新方法;
28.5、本发明将机械臂安装在聚变装置易发生的法兰、焊缝及管道的泄漏点,对泄漏实行定点范围检漏,提高了检漏速度;
29.6、本发明采用六自由度工业机械臂进行检漏,与无人机检漏系统相比,提高了系统稳定性,避免因机器人故障对聚变反应堆造成二次破坏。
附图说明
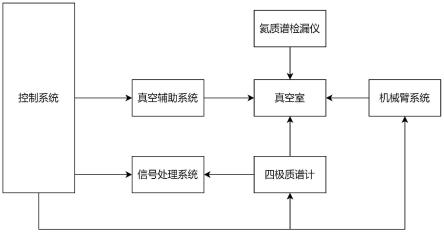
30.图1为本发明的用于聚变装置的机械臂检漏系统的结构框图;
31.图2是本发明进行检漏的结构示意图。
32.图中:氦气瓶1、机械臂底座2、2d相机3、电控阀门4、真空室5、标准漏孔6、阀门7、真空管道8、氦质谱检漏仪9、四极质谱计10、喷吹管道11。
具体实施方式
33.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
34.如图1,图2所示,本发明的用于聚变装置的机械臂检漏系统包括控制系统、信号处理系统、真空辅助系统、四极质谱计、氦质谱检漏仪及六自由度机械臂。所述控制系统通过有线方式连接信号处理系统、真空辅助系统、四极质谱计、氦质谱检漏仪及六自由度机械臂。本发明在实施检漏中涉及的主要部件包括氦气瓶1、机械臂底座2、2d相机3、电控阀门4、真空室5、标准漏孔6、阀门7、真空管道8、氦质谱检漏仪9、四极质谱计10、喷吹管道11。
35.所述六自由度机械臂具有影像系统和氦气喷吹系统;影像系统中的2d相机3安装在机械臂前端,用于法兰、焊缝或管道泄漏的位置定位;氦气喷吹系统包括氦气瓶1、电控阀门4和喷吹管道11;氦气瓶1为检漏提供氦气;电控阀门4一端与喷吹管道11连接安装于机械臂上,另一端与氦气输送管道连接并可远程控制氦气喷吹流量的大小。所述的六自由度机械臂由工作人员进行操控,通过影像系统和氦气供气系统对聚变装置实行定点喷氦,实现远程检漏。
36.所述检漏系统利用四极质谱计10进行初步的泄漏检测,并利用氦质谱检漏仪9准确的泄漏检测。四极质谱计10通过分析真空室5中的残余气体的质谱图来确定是否有漏孔,标准漏孔6安装在真空室5上,用于校准氦质谱检漏仪9的灵敏度、标定检出漏孔的大小,氦质谱检漏仪9工作在进行检漏期间,能够在机械臂喷吹氦气之后,实时测绘真空室5内氦气
压强曲线,并指示出被喷吹氦气的位置是否出现泄漏及漏孔的漏率。
37.所述信号处理系统能够接受四极质谱计10传输过来的质谱数据,进行数据分析,若发生泄漏,则将分析推测的结果传送给用户端来指导工作人员进行检漏和对漏缝应急处理。
38.所述真空辅助系统用于对聚变装置进行抽真空,保证聚变装置正常运行所需真空状态。
39.所述控制系统对各系统的所有设备硬件的进行远程监控,保证各子系统运行正常。控制系统对各子系统的关键部件进行远程控制服务,为各子系统之间的数据交互提供集成的控制平台及接口,以便更好实现机械臂的远程检漏工作。
40.本实施例中,真空室5为全超导托卡马克聚变装置,用于聚变实验,16个大型“d”形超导纵场磁体将产生纵场强度bt=3.5t;12个大型极向场超导磁体可以提供磁通变化δф≥10伏秒;通过这些极向场超导磁体,将能产生大于或等于100万安培的等离子体电流;持续时间将达到1000秒,在高功率加热下温度将超过一亿度。
41.本实施例中,所述聚变装置连接有真空管道8,所述氦质谱检漏仪9安装于真空管道8上;真空管道8和阀门7用作真空室5获得超高真空环境气体的传输管道,还可以通过其进行气体释放。
42.本实施例中,四极质谱计10对真空室5和真空管道8的气体成分及其分压实时监测,可以了解真空室和真空管道的真空状态,判断是否发生泄漏;标准漏孔6用于校准氦质谱检漏仪9的灵敏度、标定检出漏孔的大小;氦质谱检漏仪9用于检漏时,能够指示出被喷吹氦气的位置是否出现泄漏及漏孔的漏率。
43.本实施例中,氦气瓶1提供氦气供气系统,与机械臂上的喷吹管道相连,通过电控阀门4可以进行不同流量的氦气喷吹,摄像头3安装于机械臂的首段,用于实时观察周边环境,确定泄漏范围。
44.本发明具体的工作流程如下:
45.步骤1、首先在聚变装置运行时,通过控制系统控制各子系统运行状态;
46.步骤2、通过四极质谱计10对真空室5和真空管道8的气体成分及其分压实时监测,并将采集到信息发送给信号处理系统,观察是否出现气体压强大范围变化及其他气体成分进行泄漏判断;
47.步骤3、当聚变装置发生泄漏时,通过信号处理系统分析,若泄漏发生在外部空气泄漏,可控制机械臂进行远程检漏;
48.步骤4、检漏工作人员控制机械臂,利用机械臂影像系统,对当前机械臂可移动范围内的法兰、焊缝或真空管道进行定点泄漏检测,控制机械臂上的电控阀门对泄漏范围进行氦气喷吹;
49.步骤5、喷吹预定时间后,利用氦质谱检漏仪9可指示出被检测位置是否存在泄漏及漏孔的漏率,若出现泄漏,氦质谱检漏仪9中氦曲线会上升,漏率值也会增大;
50.步骤6、检漏过程中监测的质谱数据也会被送到信号处理系统进行分析处理,评估泄漏情况以及泄漏对装置运行的危险性,并给出应急的解决方案,来指导工作人员对漏点进行可靠的处理。
51.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以
限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。