1.本发明涉及航空航天技术领域,特别涉及一种基于推土机距离度量的装备健康度评估方法及装置。
背景技术:
2.在航空航天领域,航空航天器等高可靠性的大型复杂系统,其功能和性能不断提高,复杂性和综合化程度也不断增加。为保证航空航天器巡航、在轨可靠稳定运行,复杂装备、系统的健康评估作为健康管理活动之一,利用传感器得到的衰退信息来监视、评估系统的健康状态。目前航空航天器健康状态评估领域应用广泛的主要是基于数据驱动的状态评估方法,随着传感器技术的不断发展,航空航天器复杂装备的监测参数随时间变化的退化序列越来越容易获得,更加推动了基于数据驱动的健康评估方法的发展。而提升评估准确度的关键在于构建一种能够从多种评价维度准确认知目标装备性能退化程度的评估方法。在实际运行中,很多装备的性能退化过程具有明显的两阶段特点:1)在开始服役后的较长一段时间内,装备处于较为稳定的高性能状态或健康状态;2)健康状态维持非固定时长后装备将进入性能退化阶段,直至达到到寿条件不再执行飞行任务。
3.在现有基于数据驱动的装备状态评估方法中,如“一种行星齿轮箱健康状态评估方法cn201610036846.x”通过将原始振动信号进行经验模态分解,计算原始振动信号能量值实现行星齿轮箱健康状态评估;以及“基于测试数据的固体火箭装备健康状态评估方法cn201610173851.5”利用三角模糊函数下的隶属度实现不同健康状态等级的分配目标。
4.现有发明方法多为基于非线性和非平稳性振动信号的状态评估,忽略了具有明显退化趋势的传感器参数对装备性能状态的描述。同时,未能充分利用装备参数数据的时序分布特征的特点。另外,上述现有技术均没有形成一套系统的、完整的状态评估流程,针对不同的复杂装备及其多路监测参数,现有技术的应用效果存在显著差异。上述不足影响了装备状态评估的准确性。
技术实现要素:
5.根据本发明实施例提供的方案解决的技术问题是如何提高装备健康评估的准确性。
6.根据本发明实施例提供的一种基于推土机距离度量的装备健康度评估方法,包括:
7.分别获取待评估健康目标装备的运行监测数据和n个训练装备的历史运行监测数据;
8.利用所述n个训练装备的历史运行监测数据,获取健康基准集和故障基准集;
9.通过推土机距离度量方法,计算所述目标装备的运行监测数据与所述健康基准集的健康推土机距离,以及计算所述目标装备的运行监测数据与所述故障基准集的故障推土机距离;
10.通过对所述健康推土机距离和所述故障推土机距离分别进行融合处理,得到融合结果,并将所述融合结果作为所述目标装备的健康度评估结果。
11.根据本发明实施例提供的一种基于推土机距离度量的装备健康度评估装置,包括:
12.获取模块,用于分别获取待评估健康目标装备的运行监测数据和n个训练装备的历史运行监测数据;以及利用所述n个训练装备的历史运行监测数据,获取健康基准集和故障基准集;
13.计算模块,用于通过推土机距离度量方法,计算所述目标装备的运行监测数据与所述健康基准集的健康推土机距离,以及计算所述目标装备的运行监测数据与所述故障基准集的故障推土机距离;
14.融合模块,用于通过对所述健康推土机距离和所述故障推土机距离分别进行融合处理,得到融合结果,并将所述融合结果作为所述目标装备的健康度评估结果。
15.根据本发明实施例提供的方案,通过对装备的性能衰退参数数据(历史运行监测数据)进行野值的剔除,将缺失数据插值补齐后平滑降噪的数据预处理,提高数据可用度;通过性能参数同向翻转等权重平均筛选出装备健康状态集与故障状态集,作为状态评估基准集;滑窗计算待评估装备数据与健康基准集和故障基准集的时序分布推土机距离,作为装备性能衰退状态评估指标;线性过度生成健康度,实现装备多维度状态评估。本方法流程充分利用了装备性能衰退参数时序分布的变化特征,系统地构建了装备线性生成健康度模型,兼顾了装备实时状态评估分析,提高了评估精度。
附图说明
16.此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于理解本发明,并不构成对本发明的不当限定。在附图中:
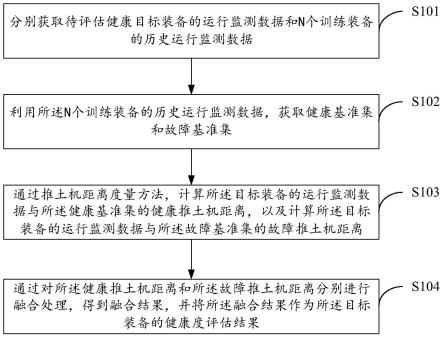
17.图1是本发明实施例提供的一种基于推土机距离度量的装备健康度评估方法的流程图;
18.图2是本发明实施例提供的一种基于推土机距离度量的装备健康度评估装置的示意图;
19.图3是本发明实施例提供的基于推土机距离的装备健康评估的模块示意图;
20.图4是本发明实施例提供的确定表征发动机健康状态的8个参数的示意图;
21.图5是本发明实施例提供的图4中8个参数进行处理后的处理结果示意图;
22.图6是本发明实施例提供的以1号训练发动机与测试发动机为例的计算推土机距离结果示意图;
23.图7是本发明实施例提供的以1号训练发动机与测试发动机为例的健康结果示意图。
具体实施方式
24.以下结合附图对本发明的优选实施例进行详细说明,应当理解,以下所说明的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
25.图1是本发明实施例提供的一种基于推土机距离度量的装备健康度评估方法的流
程图,如图1所示,包括:
26.步骤s101:分别获取待评估健康目标装备的运行监测数据和n个训练装备的历史运行监测数据;
27.步骤s102:利用所述n个训练装备的历史运行监测数据,获取健康基准集和故障基准集;
28.步骤s103:通过推土机距离度量方法,计算所述目标装备的运行监测数据与所述健康基准集的健康推土机距离,以及计算所述目标装备的运行监测数据与所述故障基准集的故障推土机距离;
29.步骤s104:通过对所述健康推土机距离和所述故障推土机距离分别进行融合处理,得到融合结果,并将所述融合结果作为所述目标装备的健康度评估结果。
30.其中,所述利用所述n个训练装备的历史运行监测数据,获取健康基准集和故障基准集包括:通过对所述n个训练装备的历史运行监测数据依次进行数据预处理、趋势规整化以及基准集筛选处理后,从所述n个训练装备的提取出mh个健康基准装备和mf个故障基准装备;根据所述mh个健康基准装备,得到健康基准集,以及根据所述mf个故障基准装备,得到故障基准集。
31.具体地说,所述通过对所述n个训练装备的历史运行监测数据依次进行数据预处理、趋势规整化以及基准集筛选处理后,从所述n个训练装备的提取出mh个健康基准设备和mf个故障基准设备包括:通过对所述n个训练装备的历史运行监测数据进行数据预处理和趋势规整化处理后,得到规整化后的历史运行监测数据;利用所述规整化后的历史运行监测数据,分别计算所述每个训练装备的健康状态指标和故障状态指标;根据所述每个训练装备的健康状态指标和故障状态指标,从所述n个训练装备的提取出mh个健康基准装备和mf个故障基准装备。
32.具体地说,所述根据所述mh个健康基准装备,得到健康基准集,以及根据所述mf个故障基准装备,得到故障基准集包括:根据所述mh个健康基准装备,分别获取每个健康基准装备的健康运行监测数据,并将所述每个健康基准装备的健康运行监测数据作为健康基准集;以及根据所述mf个故障基准设备,分别获取每个故障基准装备的故障运行监测数据,并将所述每个故障基准装备的健康运行监测数据作为故障基准集。
33.其中,所述通过推土机距离度量方法,计算所述目标装备的运行监测数据与所述健康基准集的健康推土机距离,以及计算所述目标装备的运行监测数据与所述故障基准集的故障推土机距离包括:
[0034][0035][0036]
其中,表示目标装备第i个监测数据,第j个参数值对应的健康推土机距离;表示目标装备第i个监测数据,第j个参数值对应的故障推土机距离;其中i=1,2,...,n-wind,wind表示滑窗宽度;n表示目标装备监测数据总时长数;w表示推土机距离计算;k表
示健康基准集或故障基准集中的装备编号;表示目标装备第i个窗口中第j个参数监测数值,表示健康基准集中第k个装备中第j个参数对应的数据值;表示故障基准集中第k个装备中第j个参数对应的数据值。
[0037]
其中,所述通过对所述健康推土机距离和所述故障推土机距离分别进行融合处理,得到融合结果包括:通过对所述健康推土机距离和所述故障推土机距离分别进行多路参数融合处理,得到健康多路参数融合结果和故障多路参数融合结果;通过对所述健康多路参数融合结果和所述故障多路参数融合结果分别进行线性权重融合处理,得到融合结果。
[0038]
具体地说,所述通过对所述健康推土机距离和所述故障推土机距离分别进行多路参数融合处理,得到健康多路参数融合结果和故障多路参数融合结果包括:
[0039][0040][0041]
其中,所述p为装备运行参数的个数;dh表示健康多路参数融合结果;df表示故障多路参数融合结果。
[0042]
具体地说,所述通过对所述健康多路参数融合结果和所述故障多路参数融合结果分别进行线性权重融合处理,得到融合结果包括:
[0043][0044][0045][0046]
其中,wf表示健康基准权重;wh表示故障基准权重;hi
t
为目标装备融合结果。
[0047]
图2是本发明实施例提供的一种基于推土机距离度量的装备健康度评估装置的示意图,如图2所示,包括:获取模块201、计算模块202以及融合模块203.
[0048]
其中,所述获取模块201,用于分别获取待评估健康目标装备的运行监测数据和n个训练装备的历史运行监测数据;以及利用所述n个训练装备的历史运行监测数据,获取健康基准集和故障基准集;所述计算模块202,用于通过推土机距离度量方法,计算所述目标装备的运行监测数据与所述健康基准集的健康推土机距离,以及计算所述目标装备的运行监测数据与所述故障基准集的故障推土机距离;以及融合模块203,用于通过对所述健康推土机距离和所述故障推土机距离分别进行融合处理,得到融合结果,并将所述融合结果作为所述目标装备的健康度评估结果。
[0049]
具体地说,所述获取模块201具体用于通过对所述n个训练装备的历史运行监测数据依次进行数据预处理、趋势规整化以及基准集筛选处理后,从所述n个训练装备的提取出mh个健康基准装备和mf个故障基准装备;根据所述mh个健康基准装备,得到健康基准集,以及根据所述mf个故障基准装备,得到故障基准集。
[0050]
本发明提出了基于推土机距离度量的双基准状态评估方法(dual-baseline assessment base earth mover distance,后文简称dba-emd)能够从健康与故障两个维度评估装备运行状态,其总体流程如图3所示。该方法首选基于全寿命装备监测数据构建健康基准集与故障基准集,然后利用推土机距离能够度量分布之间的距离的优势,通过度量评估装备监测参数与健康基准集与故障基准集之间的距离,实现装备的健康评估。
[0051]
本发明的输入数据来源于设备运行过程中安装在设备或环境中的传感器采集到的多路监测参数数据。待评估装备称为目标装备。首先,基于与目标装备同型号的其他全寿命装备历史运行监测数据,通过数据预处理、趋势规整化、基准集筛选三个步骤筛选出健康基准装备与故障基准装备,并构建健康与故障基准集。然后,通过推土机距离度量方法计算目标装备与健康和故障基准集的距离。最后通过参数融合将多路参数对应的距离值融合,通过线性权重融合将健康与故障两个维度的距离值融合,融合结果即为装备运行状态的健康度数值。
[0052]
下面结合附图3对本发明实施例进行详细说明
[0053]
1.装备数据预处理与健康评估双基准集构建
[0054]
1)装备监测数据预处理
[0055]
装备监测数据预处理过程包括:基于局部加权平滑方法的参数平滑降噪、基于最大最小值归一化的数据标准化。
[0056]
·
基于局部加权平滑方法的参数平滑降噪
[0057]
因数据采集误差与装备运行环境的综合影响,监测数据存在部分混叠噪声信息。大量噪声对评估过程会带来干扰和误判,因此需要通过剔除装备衰退参数中的噪声波动,避免误差干扰。本发明通过局部加权平滑方法实现参数的平滑降噪。
[0058]
局部加权平滑算法原理是对局部观测数据进行多项式加权拟合,并用最小二乘法进行估计,最终得到需要拟合的点。该方法的具体过程如下:
[0059]
对每一个点qi,确定一个窗口范围n,n控制局部加权回归数据平滑的尺度,在窗口内所有的qk上,k=1,2,
…
,n,使用带有权值ωk(qi)的加权最小二乘法对qi进行d阶多项式拟合,得到qi的拟合值pi,称为局部加权回归。
[0060]
函数ωk(qi)决定了权值的分布,本发明选择了一种较为常用的权重函数:
[0061][0062]
该函数是一种类似高斯分布的指数衰减函数。即,距离回归值越远的点,所占权重越低。式中λ为波长参数,控制了权值随距离下降的速率。λ越大,权重随距离下降的越快。
[0063]
·
基于最大最小值归一化方法的数据标准化
[0064]
因装备监测参数具有不同量纲,参数间数值分布差异较大。为避免数值分布对评估预测过程造成影响,如下式所示利用最大最小值归一化方法对各参数进行标准化处理:
[0065][0066]
式中,x
jmin
与x
jmax
分别为全寿命数据集中第j个监测参数的最小值与最大值。与x
i,j
为装备第j个监测参数中的第i个数据的原始数值与归一化后数值。通过上式将不同参
数数据标准化至0-1之间,为后续数据处理提供基础。
[0067]
2)装备监测参数数据的趋势规整化
[0068]
不同的监测参数对于装备性能衰退过程具有不同的响应。一些参数随着装备的运行过程,呈现逐渐上升的趋势,而另外一些参数呈现出逐渐下降的趋势。为了有效构建一个随运行时间增长而逐渐下降的健康度指标。将装备监测参数进行趋势规整化,将参数数据统一为相同变化趋势。趋势规整化采用式(1.8)进行处理:
[0069][0070]
其中,xi,j为装备第j个监测参数中的第i个数据预处理后的数值,xi,j'为趋势规整化的对应数值。
[0071]
3)装备健康评估双基准集构建
[0072]
由于装备群内的每个个体均具有不同的初始加工制造误差和故障程度,运行初期的健康程度以及装备到寿时的故障程度具有一定的个体差异性,不同个体健康与故障状态参数值存在一定分布,越接近健康/故障状态时其数据分布的交叠程度越大,甚至出现反向分布(样本个体初始健康程度/故障程度超过了健康/故障程度分布均值),导致推土机距离生成健康度过程出现首末偏差,为了有效的实现机群内个体的健康/故障偏离程度分析和健康评估,本发明设计了健康基准集gh与故障基准集gf两个状态维度的基准集用于状态评估。健康基准集合gh与故障基准集gf构建过程如下:
[0073][0074][0075]
式中,p为装备监测参数个数,x
′
1,j
与x
′
n,j
分别表示装备运行过程中第j个参数规整化后的首位与末位参数值,gh与gf分别表示装备个体健康与故障状态指标。将历史全寿命运行装备库中装备个体gh与gf分别按升序与降序排列,分别筛选排名靠前的mh与mf个装备个体作为健康与故障基准装备。各健康与故障基准装备的首末wind个监测参数值共同组成健康基准集合gh与故障基准集gf,记为:
[0076]
[0077][0078]
其中,
[0079][0080][0081]
其中,和分别表示装备健康基准集和故障基准集中第k台装备中第j个参数的对应的基准数据集合,该集合中共包括wind个数据点。即为在健康基准集中共包括mh个健康基准装备,每个装备有p个通道的监测参数,每个监测参数包括装备开始运行的前wind个监测参数值。反之,故障基准集中共包括mf个故障基准装备,每个装备有p个通道的监测参数,每个监测参数包括装备到寿前的最后wind个监测参数值。
[0082]
2.基于dba-emd的装备健康状态评估
[0083]
考虑到装备在性能衰退过程中,监测参数在短期内符合某个恒定均值和方差的统计分布,而在长期范围内,则体现为均值逐渐下降,方差逐渐增大的分布偏移过程。因此,可以通过度量不同短期区间内参数值的统计分布相对于gh与gf的偏离程度,来评估装备不同退化期的健康度。不同于度量点之间距离(如:欧式距离)、向量之间距离(如:余弦距离)以及集合之间距离(如:豪斯多夫距离)的距离度量方法,推土机距离可有效衡量两个概率分布之间的距离。本发明提出基于推土机距离度量装备某固定时间间隔内监测参数相较健康基准集的分布偏移程度,以评估该时间段内装备的健康状态。
[0084]
目标装备的数据集记为分别计算g
t
与gh和gf的推土机距离,
[0085][0086][0087]
其中与分别表示目标装备第i个时间窗口中的,第j个监测参数数据与健康基准集和故障基准集之间的推土机距离值,其中i=1,2,...,n-wind,n表示目标装备总采样点数。w表示推土机距离计算。表示目标装备第i个窗口中第j个参数监测数值,表
示健康基准集中第k个装备中第j个参数对应的数据值,表示故障基准集中第k个装备中第j个参数对应的数据值。
[0088]
推土机距离的定义如下:
[0089][0090]
式中,π(p1,p2)是分布p1,p2组合起来的所有可能的联合分布的集合。从每一个可能的联合分布中采集样本x和y,并计算出这对样本的距离,即得到该可能的联合分布下,样本对距离的期望值。在所有可能的联合分布中得到的期望值下界即得到推土机距离。
[0091]
为提高装备多路监测参数的数据信息利用率,实现装备健康状态的综合表征,计算各参数中目标装备与健康基准集和故障基准集的推土机距离值的算术平均值,以此将目标装备各监测参数融合统一的距离值,融合后距离值分别用dh、df表示,计算方法如下:
[0092][0093][0094]
为了提高评估的准确性,避免反向分布造成的评估误差,本发明采用一种线性权重融合的标准化处理方法将dh和df转换为装备健康度序列,具体融合方式如下所示:
[0095][0096][0097][0098]
其中,wf、wh分别表示健康基准权重和故障基准权重。hi
t
为目标装备健康度序列(融合结果)。通过健康度序列,可以量化表征装备运行状态,为装备运行维护与基于状态检修提供了保障,
[0099]
下面以具体的实例来说明本发明的技术方案
[0100]
选择2008年phm数据挑战赛中发动机数据进行实例分析,该数据由c-mapss(commercial modular aero-propulsion system simulation)仿真获得,其中共有训练发动机(全寿命运行发动机)100台,共计20631个循环周期,测试发动机(待评估发动机)100台。本专利以1号全寿命发动机与1号待评估发动机为例开展健康状态评估案例分析。1号全寿命发动机历史循环数为192个运行周期。1号待评估发动机历史循环数为31个运行周期。
[0101]
针对航空发动机运行特点,确定表征发动机健康状态的8个参数为低压压缩机出口温度、高压压缩机出口温度、低压涡轮出口温度、高压压缩机出口压力、风扇转速、高压压缩机出口静态压力、燃料流量比、燃烧器的燃烧空气比。其中,以1号全寿命发动机为例,8个参数原始数据如图4所示。
[0102]
确定数据集中8个参数为衰退敏感参数进行数据剔野、补齐、降噪与归一化处理,结果如图5所示。
[0103]
根据数据衰退变化趋势,对参数高压压缩机出口压力和低压涡轮出口温度参数进
行翻转,使得全部8个参数数据退化方向均为由小到大。通过上述步骤确定健康样本集为与故障样本集对应发动机编号如下表所示。
[0104] 发动机号健康样本集77#、82#、94#、14#、8#、1#、46#、60#、27#、81#故障样本集55#、61#、21#、83#、7#、39#、90#、72#、65#、15#
[0105]
推土机距离滑窗宽度设为t=5,将测试发动机与健康和故障样本集数据滑窗计算推土机距离,8个参数结果取平均,并将结果归一化展示,以1号训练发动机与测试发动机为例,计算结果如图6所示。
[0106]
以1号训练发动机与测试发动机为例,推土机距离数据集长度为188,分别计算其每次飞行循环健康度的值,得到发动机健康状态定量表征序列,并可视化展示,计算结果如图7所示。从结果显示,本专利提出的方法能够很好的评估发动机性能状态,1号全寿命训练发动机健康状态随运行循环数的增长健康程度不断下降。1号测试发动机处于运行初期阶段,健康度未发生明显衰退。
[0107]
根据本发明实施例提供的方案,性能状态的定量描述是确定发动机从何时开始衰退的关键,进而影响确定迁移样本的有效性。不同的度量指标对性能状态的描述容易出现端点度量偏差的现象。发动机运行初期,监测参数与健康基准的距离在描述性能状态过程中出现偏差。同样的现象在运行临近到寿阶段时,出现在了监测参数与故障基准的度量过程中。双基准集的建立能够解决这种性能状态度量过程中的“边缘偏差”。通过装备监测参数分析与计算,量化装备运行性能状态,为基于状态维修提供指导。
[0108]
尽管上文对本发明进行了详细说明,但是本发明不限于此,本技术领域技术人员可以根据本发明的原理进行各种修改。因此,凡按照本发明原理所作的修改,都应当理解为落入本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。