1.本发明涉及精密测量技术领域,尤其涉及一种基于光谱共焦的半球谐振子内外表面形貌测量方法。
背景技术:
2.半球谐振子作为惯性导航器件半球谐振陀螺的重要组成部分,外形为透明半球壳状,轻薄,厚度通常小于1mm,其几何形貌精度在很大程度上决定了产品最终的工作性能。然而由于加工误差的存在,所生产制造出来的半球谐振子表面形貌与理论设计值之间往往具有不可预测的差异,这极大制约了我国半球谐振陀螺在军用和民用惯导领域的发展。
3.中国专利申请cn112344865a公开了一种半球谐振子壁厚及壁厚均匀性原位测量系统及方法,通过将半球谐振子夹持在机床主轴c轴上,再采用设置于机床b轴上的彩色共聚焦传感器可以测得半球谐振子的壁厚及其周向壁厚不均匀性,但其在测量过程中严格要求彩色共聚焦传感器的出射光线垂直于半球谐振子的轴线并通过球心,由于在实际操作过程中难以实现,往往会引入数十微米的测量误差;此外,彩色共聚焦传感器在大角度倾斜测量条件下的反射光强较弱,这会使得所提方法无法对远离半球谐振子唇沿部分的表面进行壁厚,将导致获得测量数据不完整。还有学者提出采用斐索干涉仪来多次测量半球谐振子的部分表面,并通过表面拼接的方法来获得其整个表面形貌及壁厚信息,但由于斐索干涉仪的操作过程异常复杂,需经过极为繁琐的调试过程才能进行测量,十分难以将其集成应用到半球谐振子加工设备上实现在线测量。因此亟需提出一种能够应用于半球谐振子加工过程中的在线形貌测量技术来指导其加工以保障半球谐振子的生产成品率。
技术实现要素:
4.本发明的目的是针对现有技术的不足,提出了一种基于光谱共焦的半球谐振子内外表面形貌测量方法。
5.本发明解决其技术问题所采用的技术方案如下:
6.步骤1、调节光谱共焦测头与半球谐振子间的位置及姿态,使光谱共焦测头的光轴与半球谐振子转轴相交并形成一定的夹角完成系统初始校准;
7.步骤2、根据半球谐振子内外半球表面半径的理论设计值,以光谱共焦测头横向分辨率的一半为扫描测量间隔,对所有测量点处进行曲面平行平板近似,并记录该平板与光谱共焦测头的垂面间的理论夹角数值,即测量点处对应的等效倾角;
8.步骤3、使光谱共焦测头沿直线进行扫描运动,半球谐振子绕自身轴线进行旋转运动,采集并提取半球谐振子表面各测量点处的光谱谱峰位置数据;
9.步骤4、建立倾斜平板补偿模型计算各测量点处半球谐振子外表面距离d和内外表面的间距δd,最后将测量结果转化为点云后生成半球谐振子内外表面形貌。
10.进一步的,步骤2中的曲面平行平板近似的具体方法为:
11.以半球谐振子表面任一测量点为切点做该点处内外表面的平行切面,取两切面所
夹有限大平面得到的该测量点处的曲面近似平行平板。
12.进一步的,步骤4中倾斜平板补偿模型的具体内容包括:
13.4-1.综合各测量点的近似平行平板倾角数值和光谱谱峰位置数据,采取光线追迹的方法补偿倾斜平板对光谱共焦测头所采集的光谱谱峰位置偏移的影响,获得测量点处对应的半球谐振子内外表面的间距δd(亦即测量点处对应的半球谐振子内外表面的间距)为:
[0014][0015]
式中δ为测得的原始光谱谱峰位置差值,θ1为聚焦在平板下表面光线的入射角,α为平板的倾角,n1为平板材料折射率,ω为绕光谱共焦测头光轴的旋转角。
[0016]
4-2.选取多个不同厚度的平板在不同倾角下使用光谱共焦测头进行标定测量实验,对比实际标称值δda与模型测量值δdm之间的差异,引入倾角修正因子k将上式中平板倾角α修正为kα代入模型使得模型测量修正值δd
m’与实际标称值δda之差最小,以此提高模型测量精度。
[0017]
进一步的,根据半球谐振子内外表面形貌还可通过数据处理获得半球谐振子任意位置处的壁厚及各类尺寸、形状误差数值。
[0018]
与现有技术相比,本发明的有益效果为:
[0019]
1、对测量时光谱共焦测头和半球谐振子之间的相对位置关系要求较低,系统易于调节、操作简单,经过简单的安装和调试即可集成在半球谐振子的加工设备上实现在线测量。
[0020]
2、基于曲面平行平板近似的方案,建立了倾斜平板补偿模型对光谱共焦测头测量结果进行补偿将测量误差提升至亚微米量级,有效地减小了光谱共焦传感器测量半球谐振子弯曲表面时由于表面曲率引入的测量误差。
[0021]
3、采用大工作倾角的光谱共焦测头,经测头一次直线扫描运动和半球谐振子绕轴的旋转运动就可以实现半球谐振子内外表面全貌测量,测量数据完备,且所测形貌结果还可用于进一步计算半球谐振子任意位置处的壁厚及各类尺寸、形状误差数值。
附图说明
[0022]
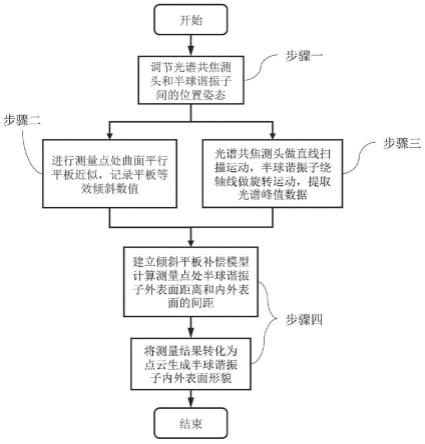
图1为本发明半球谐振子内外表面形貌测量方法流程图。
[0023]
图2为本发明半球谐振子表面形貌测量示意图。
[0024]
图3为本发明曲面平行平板近似的示意图。
[0025]
图4为本发明倾斜平板补偿模型原理图。
具体实施方式
[0026]
为使本发明的目的、技术方案和优点更加清晰,下面结合附图并举实施例来进一步详细说明。
[0027]
本发明公开了一种基于光谱共焦的半球谐振子内外表面形貌测量方法,如图1所
示,包括以下步骤:
[0028]
步骤1、如图2所示,调节位移运动台和姿态调整台改变光谱共焦测头与半球谐振子间的位置及姿态,使光谱共焦测头的光轴与半球谐振子转轴相交并形成一定的夹角θ。由于在大倾角测量条件下的光谱共焦测头获得的光谱信号信噪比大大降低,故将夹角θ设置为最大可测倾角40
°
以尽可能增大光谱共焦测头的有效测量区域。本实施例中光谱共焦测头的可测倾角范围达80
°
,基本覆盖半球谐振子全部的内外表面。但是,此处的最大可测倾角并不局限于上述数值,其具体数值依据光谱共焦测头的设计量程和精度等可有不同的选择,至此完成系统的初始校准;
[0029]
步骤2、根据半球谐振子内外半球表面半径的理论设计值,本实施例中以光谱共焦测头横向分辨率的一半为扫描测量间隔,对所有测量点处进行曲面平行平板近似,并记录该平板与光谱共焦测头的垂面间的理论夹角数值(即测量点处对应的等效倾角)。需注意的是虽然半球谐振子内外半球表面的实际形貌可能和其理论设计值之间存在差异,但由于光谱共焦测头对小倾角不敏感的特性,因此可以忽略由于这一差异所引起的等效倾角误差的问题。
[0030]
如图3所示,曲面平行平板近似的具体方法为:以半球谐振子表面上任一测量点(由于在极小尺度下,选用内表面测量点或外表面测量点做平行切面对最终的测量结果均影响不大)为切点做该点处内外表面的平行切面,取两切面所夹有限大平面得到的该测量点处的曲面近似平行平板,平板材料选择与本实施例中半球谐振子同样的熔融石英;
[0031]
步骤3、使光谱共焦测头沿直线进行扫描运动,半球谐振子绕自身轴线进行旋转运动,使光谱共焦测头每移动一个扫描测量间隔半球谐振子恰好旋转一周,同时采集并提取半球谐振子表面各测量点处的光谱谱峰位置数据;
[0032]
步骤4、建立倾斜平板补偿模型计算各测量点处半球谐振子外表面距离d和半球谐振子内外表面的间距δd(即图2所示的半球谐振子内外表面测量点间的距离),最后将测量结果转化为点云后生成半球谐振子内外表面形貌。
[0033]
倾斜平板补偿模型的具体内容包括:
[0034]
(1)综合各测量点的近似平行平板倾角数值和光谱谱峰位置数据,采取光线追迹的方法补偿倾斜平板对光谱共焦测头所采集的光谱谱峰位置偏移的影响。如图4所示,波长分别为λ1和λ2的光线分别聚焦在平行平板的上下表面。根据正弦定理得:
[0035]n0 sinθ1=n
1 sinθ2, (1)
[0036]
式中θ1和θ2分别为聚焦在平板下表面光线的入射角和折射角,n0和n1为空气和平板材料的折射率,其中n0=1。随后,在三角形oo1o2和oo2o3中应用正弦定理,得:
[0037][0038][0039]
式中α为平板的倾角,d为在图4所示测量截面下的平行平板上下表面间距。联立式(1)~(3),可得:
[0040][0041]
式中δ为测得的原始光谱谱峰位置差值,该值可在光谱共焦传感器中直接读取,其本质为测得信号当中两光谱波峰对应的光波长映射为距离值后的差值。
[0042]
充分考虑绕光谱共焦测头光轴旋转的不同旋转角ω下的光线,进行归一化操作后最终获得平行平板上下表面间距δd(亦即测量点处对应的半球谐振子内外表面的间距)为:
[0043][0044]
(2)选取多个不同厚度的熔融石英玻璃平板在不同倾斜角下使用光谱共焦测头进行标定测量实验,对比实际标称值δda与模型测量值δdm之间的差异,引入倾角修正因子k将上式中平板倾角α修正为kα代入模型使得模型测量修正值δd
m’与实际标称值δda之差最小,以此提高模型测量精度。
[0045]
作为一种优选的实施方式,根据半球谐振子内外表面形貌还可通过数据处理获得半球谐振子任意位置处的壁厚及各类尺寸、形状误差数值。
[0046]
需要强调的是,上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。