技术特征:
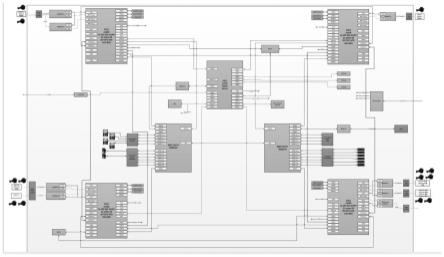
1.一种基于自动驾驶多核异构冗余高速车载通信的l4l3域控制器平台,其特征在于,包括第一soc1、第二soc2、第三soc3、第四soc4;所述第一soc1、所述第二soc2、所述第三soc3和所述第四soc4分别于mcu通讯连接;所述第一soc1、所述第二soc2和所述第三soc3,用于处理周视的视觉感知和视觉定位;所述第四soc4,用于处理环视视觉感知;第一以太网sw1和第二以太网sw2构成多路千兆以太网swich,所述多路千兆以太网swich,具备12路百兆车载以太网100base-t1,用于传输外部的4d毫米波雷达点云数据;具备8路千兆车载以太网1000bast-t1用于传输外部的激光雷达点云数据,并且用于和ibox,以及其他的自动驾驶域控制器通信连接;具备四路rgmii, 用于第一soc1,第二soc2,第三soc3,第四soc4和mcu 之间高速通信。2.根据权利要求1所述的一种基于自动驾驶多核异构冗余高速车载通信的l4l3域控制器平台,其特征在于,所述第一soc1连接两路摄像头,所述第二soc2连接四路摄像头,所述第三soc3连接一路摄像头,所述第四soc4连接六路摄像头,14路的摄像头输入实现视觉感知和激光雷达感知的融合。3.根据权利要求1所述的一种基于自动驾驶多核异构冗余高速车载通信的l4l3域控制器平台,其特征在于,所述多路千兆以太网swich中多余的sgmii 用于扩展工业以太网用于调试或者转换为rgmii连接mcu的rgmii接口。4.根据权利要求1所述的一种基于自动驾驶多核异构冗余高速车载通信的l4l3域控制器平台,其特征在于,所述第一soc1,所述第二soc2,所述第三soc3和所述第四soc4之间通过pcie总线实现多核之间的高速通信;当多个soc之间的以太网通信失效时,pcie通信构成冗余。5.根据权利要求4所述的一种基于自动驾驶多核异构冗余高速车载通信的l4l3域控制器平台,其特征在于,所述pcie总线用于冗余备份,pcie的通信可以使用芯片自带的pcie接口或通过pcie swith构成可扩展的高速通信链路。6.根据权利要求1所述的一种基于自动驾驶多核异构冗余高速车载通信的l4l3域控制器平台,其特征在于,所述第一soc1、所述第二soc2、所述第三soc3和所述第四soc4采用a1000芯片,a1000芯片的ai算力为53tops,最高可达212topsai算力。
技术总结
一种基于自动驾驶多核异构冗余高速车载通信的L4L3域控制器平台,第一SOC1、第二SOC2、第三SOC3和第四SOC4分别于MCU通讯连接;第一SOC1、第二SOC2和第三SOC3,用于处理周视的视觉感知和视觉定位;第四SOC4,用于处理环视视觉感知;第一以太网SW1和第二以太网SW2构成多路千兆以太网SWICH,多路千兆以太网SWICH,具备12路百兆车载以太网100BASE-T1,用于传输外部的4D毫米波雷达点云数据;具备8路千兆车载以太网1000BAST-T1用于传输外部的激光雷达点云数据,并且用于和IBOX,以及其他的自动驾驶域控制器通信连接;具备四路RGMII,用于第一SOC1,第二SOC2,第三SOC3,第四SOC4和MCU之间高速通信。该平台通过多核异构的新型系统平台架构实现高AI算力,通过车载以太网SWITCH1和SWITH2实现处理器之间的高速通信。SWITH2实现处理器之间的高速通信。SWITH2实现处理器之间的高速通信。
技术研发人员:陈加权 张显宏 代圩金 郑文龙 孙文 李娅丽
受保护的技术使用者:上海友道智途科技有限公司
技术研发日:2022.11.01
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。