具有电源电流稳定的电压驱动器
背景技术:
1.电子部件诸如半导体设备、电路和印刷电路板(pcb)组件在其制造期间和之后使用测试系统诸如自动化测试装备(ate)来进行频繁测试。为了执行这些测试,ate可包括生成或测量测试信号的仪器,使得可在特定被测设备(dut)上测试一系列操作状况。例如,仪器可生成施加到半导体设备的一定模式的数字或模拟信号,并且可测量作为响应的来自半导体设备的数字或模拟信号。
2.ate频繁地用于将具有特定电压波形的测试信号施加到dut的一个或多个测试点。为了生成此类测试信号,ate可包括生成可编程电压电平的电压驱动器。电压驱动器的输出处的电压电平可通过数字输入来编程,该数字输入在用户输入处指定或者根据从ate的其余部分接收的数字信号来指定。
3.电压驱动器可以是单端的,并且在用于连接到dut上的测试点的单个输出端口处提供可编程输出电压。另选地,电压驱动器可为差分的并且生成差分电压信号以驱动将差分信号作为输入的dut。所生成的差分电压信号包括在一对差分输出处通常具有相反相位的两个电压波形。
4.一些电压驱动器通过从一个或多个电源电压汲取功率来生成输出电压。电源电压有时可被提供为电源电压轨,该电源电压轨连接到电压源并且限定电压驱动器能够输出的最大或最小电压电平。例如,电压驱动器可相对于基准电压或接地连接到单个电压源。电压驱动器可另选地连接到两个或更多个不同的电源电压,诸如可从正电源和负电源获得。
5.在操作中,ate内的电源电压的电压电平通常不改变,即使电压驱动器的输出处的电压电平是可控制的。相反,可控制电压驱动器以修改耦接到电压驱动器的输出的电源中的一者的比例,使得输出处的电压电平可被设定为提供具有可编程特性的测试信号,从而使得ate可测试许多类型的半导体设备。
技术实现要素:
6.本技术的各方面涉及电压驱动器电路及其操作方法,以在汲取稳定电源电流时提供可变输出电压。本发明人已经认识到并理解,与改变输出电压相关的输出电流的改变可通过由用于电压驱动器的校正驱动器生成的稳定电流来抵消,使得从所述电源电压汲取的电源电流可保持基本上稳定。所述校正驱动器可连接到一个或多个电源电压,并且被编程为输出稳定电流,使得电源电流在所述一个或多个电源电压中的每个电源电压下保持稳定。因此,此类驱动器可使得测试系统能够具有稳定电源电流、稳定电源电压,并且继而具有稳定且可预测的输出电压,以更可靠地或更精确地测试被测的半导体设备。
7.根据一些实施方案,提供了一种具有电源电流稳定的电压驱动器。所述电压驱动器包括:输出端口,所述输出端口具有输出电压和输出电流;电压驱动器电路,所述电压驱动器电路连接到第一电源电压、第二电源电压和所述输出端口;稳定端口,所述稳定端口具有稳定电流;校正驱动器,所述校正驱动器连接到所述第一电源电压、所述第二电源电压和所述稳定端口。所述校正驱动器被配置为调整所述稳定电流,使得由于输出电压改变而引
起的所述输出电流的改变被所述稳定电流的改变抵消。
8.根据一些实施方案,提供了一种用于操作电压驱动器的方法。所述电压驱动器具有连接到第一电源电压的第一电源端口、连接到第二电源电压的第二电源端口、输出端口、稳定端口,以及连接到所述第一电源端口、所述第二电源端口和所述稳定端口的校正驱动器。所述方法包括:接收表示第一输出电压的第一信号;响应于接收到所述第一信号,在所述输出端口处生成所述第一输出电压并且在所述稳定端口处生成第一稳定电流,使得所述第一电源端口具有第一电源电流;接收表示与所述第一输出电压不同的第二输出电压的第二信号;以及响应于接收到所述第二信号,在所述输出端口处生成所述第二输出电压并且在所述稳定端口处生成第二稳定电流,使得所述第一电源端口具有与所述第一电源电流相差不超过10%的第二电源电流。
9.上述为由所附权利要求书限定的本发明的非限制性内容。
附图说明
10.各种方面和实施方案将结合以下附图描述。应当理解,附图未必按比例绘制。在附图中,不同图中所示的每个相同或近乎相同的部件由相同的标号表示。为了清晰起见,并非对每张附图中的每个部件都进行了标记。
11.图1是其中可应用根据本技术的方面的电压驱动器电路的自动化测试系统的示例性实施方案的示意图;
12.图2是示出根据本技术的一个方面的示例性引脚电子器件(pe)的示意图;
13.图3是示出根据本技术的一个方面的具有电压驱动器电路的示例性pe的等效电路模型的示意图;
14.图4是示出根据本技术的一个方面的具有电压驱动器电路和校正驱动器的示例性pe的等效电路模型的示意图;
15.图5是根据一些实施方案的示例性电压驱动器电路和示例性校正驱动器的示意图;
16.图6是根据图4和图5所示的实施方案的示出作为示例性电压驱动器中的输出电压的函数的电源电流的数据曲线的集合;
17.图7是根据一些实施方案的用于操作电压驱动器的方法的流程图。
具体实施方式
18.发明人已经认识到并理解,现代半导体芯片(诸如大存储器)的测试可通过限制电源电压波动的电压驱动器的新设计来改善。此类技术可应用于对电压源波动特别敏感的电压驱动器,诸如单端驱动器和基于一个或多个电源电压电平之间的电阻划分的电压驱动器。因此,这些驱动器可用于ate的pe,从而使得能够使用消耗相对低功率的驱动器。使用此类驱动器还可使得pe具有生成适当大量的测试信号所需的高密度的驱动器。
19.发明人已经认识到并理解,由于确保电源电压电平稳定的一种方式是确保电压驱动器随时间推移从每个电源电压汲取稳定量的电流。在基于电阻分压器的电压驱动器中,当调整输出电压时,到给定负载的输出电流将改变,这继而改变从电压源汲取的电源电流。电源电流的改变可改变电源电压电平,从而导致电压驱动器的输出的不准确性。发明人已
经认识到并理解,这种不准确性可通过校正驱动器来避免,该校正驱动器用于生成稳定电流以抵消输出电流的改变,使得电源电流的改变基本上减小或消除。
20.发明人已经认识到并理解,校正驱动器可连接到一个或多个电源电压,并且被编程为输出稳定电流,使得电源电流在一个或多个电源电压中的每个电源电压下保持稳定。校正驱动器例如可连接在pe的电压源和电压驱动器之间。因此,此类驱动器可使得测试系统能够具有稳定电源电流、稳定电源电压,并且继而具有稳定且可预测的输出电压,以更可靠地或更精确地测试被测的半导体设备。即使在其中使用多个电压驱动器来同时生成大量测试信号的ate中也可实现可靠测试,否则该ate可能导致电源电压电平的相对较大波动。
21.根据一些实施方案,校正驱动器可通过多个校正电路片来实现。对校正驱动器的可编程控制可通过设置每个电路片内的改变该电路片的电流汲取特性的开关来实现。片的输出可一起连接到稳定端口以便共同提供稳定电流,该稳定电流可抵消电压驱动器的输出端口处的输出电流的改变。开关可被配置为将电路片的部件连接到多个电压源中的一者。每个切片内的连接到多个电压源中的每一者的部件的数量以及不连接到电压源中的任一者的此类部件的数量可影响多种特性,诸如电路片从电压源中的每一者汲取的电流。由电路片汲取的电流可组合以确保从多个电压源汲取的电流的总和保持稳定,并且还可使彼此平衡以确保当电压驱动器的输出电压改变时,从每个单独电压源汲取的每个电流保持稳定。
22.图1是其中可应用根据本技术的方面的电压驱动器电路的自动化测试系统的示例性实施方案的示意图。图1示出了根据本技术中公开的方法的包含测试计算机12的测试系统10,该测试计算机控制测试器16以对被测设备(dut)20执行测试。在一些情况下,测试器16可以是使用本领域已知的技术来构造的自动化测试装备(ate)。dut 20可以是用于测试的任何合适的设备。例如,dut 20可为半导体设备。ate 16可包含用于生成和/或测量针对dut 20的测试信号14的电路。ate 16可包括被配置为生成或测量不同类型的模拟或数字信号的多个仪器。
23.根据本技术的一个方面,ate 16内的一些仪器可以引脚电子设备(pe)的形式实现,该pe具有pe驱动器,该pe驱动器生成具有设计振幅和定时的输出电压信号以提供给被测设备(dut)。例如,生成和/或测量数字信号的数字测试仪器可用此类pe电路来实现。不管其中使用pe的仪器的具体类型如何,pe均可被实现为包括大量晶体管诸如互补金属氧化物半导体(cmos)晶体管的集成电路(ic)。
24.应当理解,图1是自动化测试系统的极大简化的表示。例如,尽管未示出,但测试系统10可包括控制ate 16内的仪器的操作的控制电路。另外,测试系统10可包括处理电路以处理测量结果并且确定dut 20是否正在正确地操作。另外,图1示出了ate 16与dut 20之间的单个信号路径。本领域的技术人员将会理解,测试现代dut可能需要生成并测量数百个或数千个测试信号。因此,如本文所述的电路可在ate 16内复制多次并且被控制以提供用于测试dut 20的同步测试信号。此外,尽管图1示出了其中正在测试单个dut 20的场景,但测试系统10可被配置为测试多个设备。
25.无论生成或测量测试信号的仪器或其他部件的数量以及被测设备的数量如何,测试系统10均可包括在dut 20与ate 16内的仪器之间路由信号的信号递送部件。
26.此外,应当理解,如图所示的其他部件是示例性的而非限制性的。例如,尽管测试
计算机12在图1中被示为个人计算机(pc),但应当理解,可使用任何合适的计算设备来实现测试计算机,例如,移动设备或计算机工作站。测试计算机12可连接到网络并且能够通过网络访问资源和/或与连接到网络的一个或多个其他计算机进行通信。
27.图2是示出根据本技术的一个方面的示例性pe 200的示意图。pe200包括电压驱动器电路210,该电压驱动器电路耦接到具有第一电源电压vddo的第一电源端口212和具有第二电源电压vsso的第二电源端口214,并且响应于从编码器204接收的驱动器控制信号202而在输出端口218处提供输出电压v
out
。编码器204可基于从控制器206接收的输入数据205来生成驱动器控制信号202。应当理解,驱动器控制信号202可以是多个控制信号的聚合,该多个控制信号设置电压驱动器电路210内的多个部件的配置以控制处于v
out
的输出电压。虽然图2中示出了驱动器控制信号202的单个信号路径,但应当理解,本发明的实施方案不限于此,并且在一些实施方案中,驱动器控制信号202内的单独控制信号可被施加到电压驱动器电路210内的部件的多个控制端子。例如,编码器204可向电压驱动器电路210内的多个开关和可编程电容器的每个控制端子供应控制信号。在所示的实施方案中,电压驱动器电路210是单端电压驱动器电路。控制信号中的一者或多者可以高速操作,诸如以实现两个电压电平之间的快速切换,而其余的控制信号可以低速操作以在高速操作开始之前配置驱动器,诸如以控制电压电平和/或其他驱动器特性。
28.仍然参考图2,控制器206包括逻辑、处理器和/或存储器元件,并且可设置在pe 200的内部或外部。来自控制器206的输入数据205可为其数据速率是多个gbps(诸如多至10gbps)的数量级的高速数据。来自控制器206的输入数据205可为其数据速率是多个gbps(诸如多至10gbps)的数量级的高速数据。输入信号205可以是其数据速率为5gbps、20gbps、介于1gbps和100gbps之间、或介于5gbps和50gbps之间的高速数据流,但应当理解,本文公开的技术的各个方面可以与具有任何带宽的数据流一起使用。在一些实施方案中,输入数据205包括具有期望输出电压电平相对时间的值的数据流。输入数据205还可包括指示目标输出阻抗和时域峰值行为的配置数据。编码器204可基于所接收的输入数据205来生成驱动器控制信号202,从而控制电压驱动器电路210以生成处于v
out
的输出电压,该输出电压具有基本上对应于输入数据205中指示的值的波形。在一些实施方案中,dut可经由pe外部上的输出端口218连接到v
out
。
29.根据本技术的一个方面,发明人已经认识到并理解,当pe用于以高数据速率测试dut时,输出电压v
out
被编程为根据输入数据205改变值。当v
out
改变时,电压驱动器电路210的输出电流i
out
改变,并且由电压驱动器电路210汲取的电源电流将继而改变。电源电流的改变继而可改变电压驱动器电路的操作。此类改变可通过图3所示的电路的模型来示出。
30.图3是示出根据本技术的一个方面的具有电压驱动器电路310的示例性pe 300的等效电路模型的示意图。电压驱动器电路310可表示例如电压驱动器电路210。电压驱动器电路310包括耦接到第一电源端口vddo和第二电源端口vsso的电阻器226、228,其中输出端口io_dut以分压器配置耦接到电阻器226、228之间的节点。电压驱动器电路310的输出电压部分地基于耦接到电源端口vddo和vsso的电压源之间的电压差以及电阻器226和228的比率。在操作中,由电压驱动器电路210输出的电压可通过改变由电阻器226和228表示的电路部件的电阻来设定。
31.当输出电流i
out
流过io_dut输出端口到达电阻器230处的端接电导g
t
和端子电压v
t
时,电源电流i
1vddo
、i
1vsso
和i
out
的总和将保持恒定,尽管随输出电压v
out
而改变。这意味着当i
out
随v
out
的改变而变化时,电源电流i
1vddo
、i
1vsso
将不稳定。在一个非限制性示例中,如果io_dut经由50ω负载连接到接地gnda,则v
out
中的1v的改变将导致从vddo的上拉电流i1
vddo
的改变为约1v/50ω=20ma,这是不期望的。
32.如下所述,校正驱动器可用于解决这些挑战中的一些或全部。返回参见图2,校正驱动器250可连接到第一电源端口212和第二电源端口214以生成稳定电流i
vt
,该稳定电流可抵消i
out
的改变,使得电源端口212、214处的电源电流i
vddo
和i
vsso
保持稳定。发明人已经认识到并理解,基于基尔霍夫电流定律,i
vt
、i
out
、i
vddo
和i
vsso
的总和是非时变常数。因此,只要i
vt
和i
out
的总和在i
out
改变时保持稳定,则电源电流i
vddo
和i
vsso
的总和将是稳定的。发明人还理解并认识到,保持i
vddo
和i
vsso
的总和恒定可能不足以确保电压驱动器电路210的稳定性。尽管总和是稳定的,但一个电源电流可增加,而另一个电源电流可减少相同量。在一些实施方案中,校正驱动器250可附加地在电源端口212和214之间汲取电流以抵消电源电流i
vddo
和i
vsso
,使得电源电流中的每一者是稳定的。
33.在图2所示的实施方案中,稳定电流i
vt
被转储到稳定端口216中。在一些实施方案中,稳定端口216可保持在恒定电压vt。根据一个方面,因为校正驱动器250未连接到输出端口218,所以校正驱动器250的操作不影响电压驱动器电路210在输出端口218处的性能。例如,可调整电压驱动器电路210内的参数以在输出端口218处提供期望的输出阻抗、输出电压电平以及时域峰值行为,而不受校正驱动器250的影响。
34.在一些实施方案中,编码器204可被编程为将可编程驱动器输入信号映射至适当的驱动器特性。在一些实施方案中,可针对驱动器执行校准或计算,使得可以确定针对足够数量的驱动器控制输入信号的代表性组合给出的输出电压、阻抗和时间常数。可在变化的负载状况(诸如负载电阻和期望的输出电压电平)下重复校准。作为校准的结果,对于一组期望的驱动器特性,可选择尽可能接近地递送那些特性的一组驱动器控制输入信号。
35.此外,在一些实施方案中,可针对校正驱动器执行校准或计算,使得可以确定针对表示例如输出电压电平的足够数量的驱动器控制输入信号的代表性组合给出的稳定电流。当控制器206提供驱动器控制输入信号时,其可将对应控制信号作为输入数据255提供给编码器254,从而提供适当的稳定电流,该稳定电流可基于校准过程来确定,补偿电流不稳定性。编码器254可基于所接收的输入数据255来生成校正控制信号252,从而控制校正驱动器250以在稳定端口216处生成稳定电流i
vt
。编码器254还可控制校正驱动器250以在多个电源端口之间生成内部电流,从而稳定单独电源电流。
36.来自控制器206的输入数据255可为其数据速率是多个gbps(诸如多至10gbps)的数量级的高速数据。该数据速率可匹配将输入数据205提供给电压驱动器电路210的速率。在一些实施方案中,输入数据255可包括具有期望输出电压电平的值的数据流,使得其与输入数据205相同。在此类实施方案中,编码器254可基于用于控制电压驱动器210的输入数据205与用于致使校正驱动器250生成稳定端口216处的稳定电流i
vt
的控制信号之间的映射来生成校正控制信号252。
37.图4是示出具有电压驱动器电路410和校正驱动器450的示例性pe 400的等效电路模型的示意图。与电压驱动器电路310类似,电压驱动器电路410包括电阻分压器。分压器中的电阻器的电导可在操作中变化,诸如响应于输入到驱动器的控制信号而选择性地激活或
去激活电路片。此处,由分压器中的电阻器建模的部件的电导被示为xg0和(1
‑
x)g0,其中x为介于0和1之间的量,其可由驱动器的控制输入设定。
38.在图4中,校正驱动器450由两组电阻分压器表示。第一组451耦接在输出端口vddo、vsso以及稳定端口vt之间,并且基于电阻支路x
1h
g0、x
1l
g0来生成稳定电流i
vt
。x
1h
和x
1l
的值是反映由那些电阻支路建模的校正驱动器450的部件的改变的值。第二组453耦接在输出端口vddo、vsso之间,但不耦接到io_dut或vt。第二组453可用于平衡在i
vddo
与i
vsso
之间汲取的电流以保持它们单独稳定。
39.电压驱动器电路和校正驱动器可通过其电导可在程序控制下变化的部件来实现。在一些实施方案中,这些部件可被实现为一组或多组电路片,这些电路片可进行操作以提供可控电导,如图3和图4的模型所示。组内的电路片并联连接在vsso和vddo之间。每个电路片还包括片输出,其中组内的电路片的片输出耦接到相同节点。在每个电路片内,电阻器将通过电阻器片输出可切换地连接到电源电压中的一者或多者。在至少一组电路片中,片输出连接到电压驱动器电路的驱动器输出。发明人已经认识到并理解,将驱动器输出连接到vsso或vddo中的一者的电阻器通过电阻器的电阻并因此通过将选定数量的电路片连接到驱动器输出来贡献输出电阻r
out
,输出电阻r
out
可基于对开关的控制输入而变化以便在选定数量的电路片中产生电阻器的并联组合,该并联组合提供r
out
的期望值。
40.根据一些实施方案,每个电路片内的电阻器的第一电阻器端子连接到片输出。每个电路片包括开关,该开关耦接到来自编码器的控制信号并且由该控制信号控制以将电路片内的电阻器的第二电阻器端子可切换地连接到vddo和vsso中的一者,或者与vddo和vsso两者断开连接。当片输出连接到驱动器输出时,输出电阻r
out
基于具有连接到vddo或vsso的电阻器的电路片的并联组合。这些电路片也可被称为“激活”。其电阻器与vddo和vsso断开的电路片可称为“断开”或“去激活”。
41.根据一些实施方案,电路片可被实现为具有相同设计并且具有相同数量的电路元件的电路模块以简化电路设计,但并不要求所有电路片都以相同方式实现。在一些实施方案中,开关是金属氧化物半导体场效应晶体管(mosfet),诸如但不限于硅(si)mosfet。在一个实施方案中,电路片包括si cmos并且使用本领域已知的硅半导体制造技术来制造。发明人已理解并认识到,用si cmos技术实现电压驱动器电路的一部分或全部可减小功耗。在这样的具体实施中,每个电路片可被控制为处于三种状态中的至少一种:高状态,其中开关将电阻器连接到vddo;低状态,其中开关将电阻器连接到vsso;以及三态,其中第一电阻器端子未连接到vddo或vsso,并且因此处于浮动状态。
42.本技术的各方面还提供对驱动器输出处的输出电压的控制。在一些实施方案中,一组电路片的片输出处的输出电压可通过以下方式来调整:选择性地将第一数量的电路片连接到vddo,并且选择性地将第二数量的电路片连接到vsso,或者将第一比率的电路片连接到vddo,并且选择性地将第二比率的电路片连接到vsso。在一些实施方案中,将电路片连接到vddo或vsso包括控制电路片内的开关以将电阻器的第一电阻器端子连接到vddo或vsso。应当理解,当组内100%的已激活电路片连接到vddo时,片输出处的开路输出电压将为vddo。类似地,当100%的已激活电路片连接到vsso时,片输出处的开路输出电压将为vsso。因此,当某个比率的已激活电路片连接到vddo并且已激活电路片的其余部分连接到vsso时,输出电压将处于vsso和vddo之间的中间电平。
43.因为通过已激活片的数量来调整输出电阻,并且通过已激活片内连接到vddo的片相对连接到vsso的片的比率来调整输出电压,所以本技术的各方面可提供输出电阻和输出电压的独立可调整性。
44.步数或驱动器的输出电压可被设定为的不同值的数量取决于在两个电源电压之间并联设置的电路片的数量。可改变驱动器的输出电压的步长或粒度取决于由最小步长相对于最大步长表示的电压之间的差值除以步数。对相对较大电压范围内的输出电压的更精细控制可通过电路片组来提供,其中每个组提供可以不同步长控制的输出电压。这些组的输出电压可组合以提供电压驱动器的输出。
45.在一些实施方案中,电压驱动器电路还可包括用作分段分压器梯的分段片组。第一组最高有效位(msb)片或“粗略片”具有直接连接到驱动器输出的片输出,而第二组较低有效位(lsb)片或“精细片”具有通过一个或多个电阻器的串连接到驱动器输出的片输出。可提供多于一个lsb区段,并且因此可提供多于一组的lsb或精细片,以提供附加的精细可调整性。粗略片和精细片经由电阻器梯的网络连接到驱动器输出,使得粗略片的片输出处的电压改变有助于粗略步长,该粗略步长比由精细片的片输出处的类似电压改变水平引起的精细步长更大。如本文所述的分段电压驱动器电路可使用本领域中已知的任何分压器电阻梯网络,诸如但不限于r
‑
2r梯、r
‑
8r梯。除了在驱动器输出处提供对输出电压的粗略和精细水平的调整之外,应当理解,这种分段分压器梯还提供类似粗略和精细水平的输出电阻可调整性,其中在粗略片的片输出处的输出电阻的改变有助于r
out
中的粗略步长(与在精细片的片输出处的输出电阻的相同改变所得的步长相比)。
46.可使用类似的方法来控制校正驱动器的操作。校正驱动器可具有一组或多组校正电路片。组内的校正电路片可并联连接在vsso和vddo之间。在每个校正电路片内,电阻器将片输出可切换地连接到电源电压中的一者。
47.在至少一组校正电路片中,每个电路片内的电阻器的第一电阻器端子连接到稳定端口。每个校正电路片包括开关,该开关耦接到来自编码器的控制信号并且由该控制信号控制以将校正电路片内的电阻器的第二电阻器端子可切换地连接到vddo和vsso中的一者,或者与vddo和vsso两者断开连接。当片输出连接到稳定端口时,总稳定电流输出i
vt
基于具有连接到vddo或vsso的电阻器的一定量的校正电路片的组合。这些电路片也可被称为“激活”。其电阻器与vddo和vsso断开的电路片可称为“断开”或“去激活”。
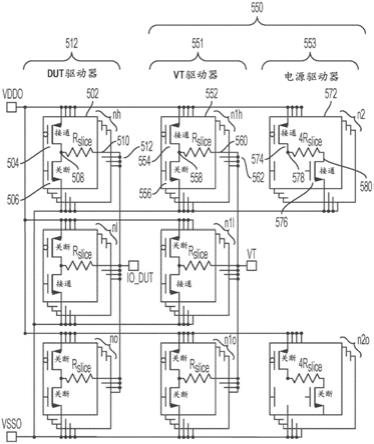
48.图5是根据一些实施方案的示例性电压驱动器电路512和示例性校正驱动器550的示意图。
49.图5示出了具有一组电路片502的电压驱动器电路512,这些电路片各自并联连接在电源电压vddo和vsso之间。虽然图5示出了每个电路片502彼此基本上相同,但应当理解,本技术的各方面并不限于此,并且不要求一组内的电路片是相同的。
50.在图5所示的实施方案中,电路片502包括:具有连接到片输出512的第一电阻器端子510的电阻器r
slice
、连接在vddo与r
slice
的第二电阻器端子508之间的第一开关504,以及连接在vsso与第二电阻器端子508之间的第二开关506。片输出512一起连接到输出端口io_dut。在每个电路片502内,片输出512通过与电阻器
slice
串联的开关504、506中的一者连接到电源电压中的一者。本发明人已经理解并认识到,电源电压和片输出之间的开关和串联r
slice
布置是在片输出处提供大输出电压范围(当片输出连接到断开负载时,处于vsso和
vddo之间的几乎全轨到轨电压范围内)的低功耗配置。在一些实施方案中,开关504和506用si cmos来实现以减小制造成本并减小功耗。应当理解,虽然r
slice
由图5中的单个电阻器符号表示,但r
slice
的具体实施不限于单个电阻器并且可包括例如一个或多个电阻器以及电路上的其他部件中的静态电阻和动态电阻的结合。
51.仍然参考图5,每个电路片502内的开关504和506可例如由如图2所示的驱动器控制信号202控制,以选择性地将r
slice
连接到电源电压vddo、vsso中的一者或不连接到任何电源电压。控制器(诸如如图2所示的控制器206)可在开关504和506均关断的情况下去激活no数量的电路片,在开关506关断时通过接通开关504激活连接到vddo的nh数量的“高”片,并且在开关504关断时通过接通开关506激活连接到vsso的nl数量的“低”片。可选择已去激活片的数量nh nl以调整该组电路片512在输出端口io_dut处的输出阻抗,同时可通过对已激活片内的数量nh和nl进行编程来调整io_dut处的输出电压电平。
52.虽然图5示出了开关504和506各自由单个晶体管实现,但应当理解,开关可以其他方式实现,并且不限于此。
53.图5还示出了校正驱动器550,该校正驱动器具有各自并联连接在电源电压vddo和vsso之间的第一组校正电路片552和第二组校正电路片572。虽然图5示出了每个校正电路片572和552彼此基本上相同,但应当理解,本技术的各方面并不限于此,并且不要求一组内的校正电路片是相同的。每个校正电路片572还类似于电压驱动器电路512中的电路片502,并且在一些实施方案中,可与电路片502相同以便于电路设计,尽管不要求校正电路片572与电路片502相同。
54.在图5所示的实施方案中,校正电路片552包括:具有连接到片输出562的第一电阻器端子560的电阻器r
slice
、连接在vddo与r
slice
的第二电阻器端子558之间的第一开关554,以及连接在vsso与第二电阻器端子558之间的第二开关556。片输出562一起连接到稳定端口vt。在每个校正电路片552内,片输出562通过与电阻器
slice
串联的开关504、506中的一者连接到电源电压中的一者。在一些实施方案中,开关554和556用si cmos来实现以减小制造成本并减小功耗。应当理解,虽然r
slice
由图5中的单个电阻器符号表示,但r
slice
的具体实施不限于单个电阻器并且可包括例如一个或多个电阻器以及电路上的其他部件中的静态电阻和动态电阻的结合。
55.仍然参考图5中的校正驱动器550,每个校正电路片552内的开关554和556可例如由如图2所示的驱动器控制信号202控制,以选择性地将r
slice
连接到电源电压vddo、vsso中的一者或不连接到任何电源电压。控制器(诸如如图2所示的控制器206)可在开关554和556均关断的情况下去激活n1o数量的校正电路片,在开关556关断时通过接通开关554激活连接到vddo的n1h数量的“高”校正电路片,并且在开关554关断时通过接通开关556激活连接到vsso的n1l数量的“低”校正电路片。可选择相应已激活校正片的数量nh、nl以调整稳定端口vt处从vddo和vsso汲取的稳定电流的量。
56.图5还示出了第二组校正电路片572,每个校正电路片具有电阻器4r
slice
,该电阻器具有经由第一开关574连接到vddo的第一电阻器端子578,以及经由第二开关576连接到vsso的第二电阻器端子580。在一些实施方案中,开关574和576用si cmos来实现以减小制造成本并减小功耗。应当理解,虽然4r
slice
由图5中的单个电阻器符号表示,但r
slice
的具体实施不限于单个电阻器并且可包括例如一个或多个电阻器以及电路上的其他部件中的静
态电阻和动态电阻的结合。
57.仍然参考图5中的第二组校正电路片572,每个校正电路片572内的开关574和576可例如由如图2所示的驱动器控制信号202控制,以经由r
slice
将vddo选择性地连接到vsso以平衡两个电源端口之间的电流。如图2所示的控制器(诸如控制器206)可在开关574和576两者都接通的情况下激活n2数量的“闭合”校正电路片,并且通过关断开关574和576来去激活n2o数量的“断开”校正电路片。
58.现在参考图4和图5两者说明具有校正驱动器的示例性电压驱动器及其操作。在该示例中,让n表示电压驱动器512中的活动电路片502的数量。n
tot
表示电压驱动器512中的电路片502的总数。nh和nl表示高和低活动电路片502的数量,如上所述。应当理解,当电路片502可以是分段电压驱动器中的“精细”片时,并且当nh和nl表示等效“粗略”片的数量时,nh和nl不必是整数并且可以是准连续数。
59.值n1h、n1l、n2是校正驱动器550中的整数,该校正驱动器在该示例中仅由粗略片组成。x是可由控制器206提供的相对驱动器级代码并且介于0和1之间(包括端点在内)。在该实施方案中,控制器206可控制电压驱动器的配置以使得nhh=n
×
x,nl=n
×
(1
‑
x),no=n
tot
–
nh
–
nl(三态)。
60.在该实施方案中,控制器206可控制校正驱动器的配置以使得x
1h
=[[(g
t
/g
tot
)
×
(v
hl
/v
ht
)
×
(x
hl
–
x)]],其中x
hl
=1/2(x
h
x
l
),x
h
=1/2(1 g
t
v
ht
/(g
o
v
hl
)),x
l
=1/2(1 g
t
v
lt
/(g
o
v
hl
));n
1h
=[n
×
x
1h
];x
1l
=[[(g
t
/g
tot
)
×
(v
hl
/(
‑
v
lt
)
×
(x
–
x
hl
)]];n
1l
=[n
×
x
1l
];n
1o
=n
tot
–
n
1h
–
n
1l
。如本文所用,符号[[z]]是指剪辑到区间[0,1]的min(max(z,0),1)或z,而符号[z]是指舍入至最接近整数的z。此外,v
hl
=vddo
–
vsso,v
ht
=vddo
–
vt,v
lt
=vsso
–
vt,v
ht
=vddo
–
vt,v
lt
=vsso
–
v
t
,g
tot
=g
o
g
t
,g
o
为驱动器输出电导,g
t
为外部端接电导。
[0061]
此外,对于第二组校正电路片553的配置,如果x≤x
hl
,则使x2=[[4
×
(g
o
/g
tot
)
×
{(x
–
x
l
)2]],或者如果x>x
hl
.,则使x2=[[4
×
(g
o
/g
tot
)
×
{(x
–
x
h
)2]]。n2=[n
×
x2];n2o=n
tot
–
n2,其中我们再次使用上文介绍的符号。
[0062]
在图4的示例中,g
o
是电压驱动器输出电导(在一个非限制性示例中为0.02s)。g
t
=外部端接电导(在一些实施方案中为0至0.033s,在一个非限制性示例中为0.02s)。g
tot
=g
o
g
t
。v
t
=外部端接电压(在一些实施方案中为0v或约1.4v)。v
t
=电源驱动器端接电压=0.56v(在一个非限制性示例中)。v
hl
=vddo
–
vsso=1.68v
–
(
–
0.56)v=2.24v(在一个非限制性示例中)。v
ht
=vddo
–
v
t
.v
lt
=vsso
–
v
t
(通常<0)。
[0063]
图6是根据图4和图5所示的实施方案的示出作为示例性电压驱动器中的输出电压的函数的模拟电源电流和功耗的数据曲线的集合。曲线602示出了没有校正驱动器的管芯上的电压驱动器的功耗,而曲线604和606示出了仅具有第1阶校正驱动器以及具有第1阶校正驱动器和第2阶校正驱动器两者的电压驱动器的功耗。曲线602、604和606示出了在给定特定端接电压v
t
和电导g
t
的情况下,校正驱动器在仅针对电压驱动电路的30mw之上增加约8mw的功耗,同时将iddo和isso限制为恒定值。
[0064]
图6提供了对可用于确定到校正驱动器的控制信号的电源驱动器电导的等式的深入了解。在图6中,iddo 0(612)和isso 0(614)是由于主驱动器(即,没有电源电流校正)引起的电源电流。iddo,comp1(622)和isso,comp1(624)是作为x(或vout)的函数线性改变的分段线性电流分布,其在被添加到原始电源电流时给出相当大的改善;参见曲线iddo 0 1
(632)和isso 0 1(634)。需注意,这些后面的电流彼此垂直偏移固定量。这意味着需要校正的剩余电流可简单地从vddo流动到vsso,即其不需要连接到vt。这也可在图4中示出。在图6的曲线中,该电流被标记为iddo2sso,comp2(636),并且其由两个抛物线构成。一旦应用了该校正,即,vddo和vsso之间的正确数量的片作为x的函数被接通,我们看到最终iddo和isso,即iddo0 1 2(642)和isso 0 1 2(644)是平坦的。最终功率曲线power 0 1 2(606)也比没有电源驱动器校正的功率power 0(602)平得多。
[0065]
仍然参见图6,相对于[
‑
0.28,0.84]v的负载满标度范围,单独电压驱动器的iddo,iddo 0(612),在0.70v处达到峰值,这对应于x=xh=0.875。iddo 0在x=1(或vout=0.84v)之前达到峰值的原因在于,当接近x=0或x=1时,从vddo通过高片然后通过低片进入vsso(即,不到达负载)的电流减少,因为通过高片或低片的电导变为零。该非负载电流对x具有非线性抛物线相关性。取决于从vddo到负载的电流针对较大vout的增加量,这可导致针对x=1未实现最大iddo 0。
[0066]
重新参见图5,针对io_dut输出电平的主电压驱动器的粗略片502通过它们可处于的三种状态进行分组:高态、低态、三态。第二列和第三列包含与电源电流稳定相关的校正电路片。在所示的实施方案中,校正电路片仅在粗略片级实现,但应当理解这不是必需的。在该实施方案中,校正驱动器中的粗略片级具体实施意味着电流稳定将不是完美的,并且在iddo和isso中留下至多约2(来自每个校正驱动器)
×
( /
‑
0.5)
×
(1/54)
×
20ma= /
‑
0.4ma误差。在一些实施方案中,当io_dut处的电压输出改变1v或更大时,vddo或vsso中的电源电流稳定可具有不超过10%的变化。在一些实施方案中,当io_dut处的电压输出改变1v或更大时,vddo或vsso中的电源电流稳定可具有不超过5%或不超过2%的变化。
[0067]
根据一个方面,如图5所示的第一组校正开关554、556可以与电路片502中的电压驱动器粗略开关504、506相同。第二组校正开关574、576可使用例如具有较高电阻的不同开关来减小静态功耗。
[0068]
图7是根据一些实施方案的用于操作电压驱动器的方法700的流程图。电压驱动器可以是具有电源电流稳定的电压驱动器,如上面的任何部分中所述,并且可包括连接到第一电源电压的第一电源端口、连接到第二电源电压的第二电源端口、输出端口、稳定端口和连接到第一电源端口的校正驱动器。
[0069]
如图7所示,在方法700的操作702处,接收表示第一输出电压的第一信号。在一些实施方案中,第一信号可为从控制器206接收的输入数据205,如图2所示,并且可包括具有电压电平和时序的期望输出电压波形的数据流。第一信号可为二进制数据信号,并且任何合适的编码方案可用于对第一信号内的表示第一输出电压的电压波形信息进行编码。
[0070]
在操作704处,电压驱动器响应于接收到第一信号而在输出端口处生成第一输出电压并且在稳定端口处生成第一稳定电流,使得第一电源端口具有第一电源电流。在一些实施方案中,一个或多个编码器诸如编码器204和254可用于从控制器接收第一信号,并且生成控制输入信号以控制电压驱动器内的电压驱动器电路和校正电路内的部件以生成输出电压和第一稳定电流。编码器可通过基于所接收的第一信号选择一组驱动器控制输入信号来生成控制信号。在一些实施方案中,可对电压驱动器电路和校正驱动器执行校准或计算,使得可以确定针对表示例如输出电压电平的足够数量的驱动器控制输入信号的代表性组合给出的输出电压电平和稳定电流。
[0071]
在操作706处,接收表示与第一输出电压不同的第二输出电压的第二信号。在一些实施方案中,第二信号可指示输出电压电平的改变,诸如输出电压波形中的信号转变边缘。
[0072]
在操作708处,电压驱动器响应于接收到第二信号而在输出端口处生成第二输出电压并且在稳定端口处生成第二稳定电流,使得第一电源端口具有与第一电源电流相差不超过10%的第二电源电流。在一些实施方案中,编码器可基于驱动器控制输入信号的选择的预编程映射来生成控制信号以控制校正驱动器内的部件,在给定输出电压电平的值并且给定负载状况(诸如负载电阻)下,该选择已知会生成可近似抵消(如果不完全抵消)从电源电压端口中的一者或多者汲取的电源电流的稳定电流。
[0073]
以上描述本发明的至少一个实施例的多个方面,应当理解本领域的技术人员可易于进行各种改变、修改和改进。
[0074]
例如,虽然如本文所述的一些实施方案使用两个电源电压轨,但应当理解,本技术的各方面不限于此并且可利用两个以上的电压轨来实现,其中一个或多个电路片连接在两个以上的电压轨之间。另选地或除此之外,电源电压轨中的一者可连接到接地。
[0075]
又如,应当理解,虽然本技术的各方面涉及对抗由于电压驱动器的输出电压(诸如图3所示的io_dut处的vout)的改变而引起的供应电流改变,但另选地或除此之外,附加的外部因素可影响电源电流的稳定性。这些外部因素包括但不限于由驱动器在其输出端口处产生的电阻、在输出端口处的外部电阻器值、所述外部电阻器的外部端接电压,以及稳定端口所连接到的外部电压的变化。应当理解,取决于应用和从外部因素引入的变化量,如本文所述的实施方案可适于考虑附加因素的已知变化。如果一个或多个外部因素以未知且不可预测的方式表现,则可与本文所述的技术一起采用附加措施来稳定电压驱动器中的电源电流,包括但不限于映射外部因素的行为或稳定外部因素。
[0076]
此类改变、修改和改进旨在作为本公开的一部分,并且被视为落入本发明的精神和范围内。此外,尽管指示出本发明的优点,但是应当理解,并非本文所述的技术的每个实施方案均将包括每个所述优点。一些实施方案可能无法实现本文有利地所述的任何特征,并且在一些情况下,可实现所述特征中的一个或多个以实现另外的实施方案。因此,上述的说明和附图仅作为举例的方式。
[0077]
可单独地、结合地或以在上述实施例中未特别讨论的各种配置方式使用本发明的多种方面,因此其应用不受限于上述说明所述或附图中所示的组件的细节和配置。例如,在一个实施例中所述的方面可以任何方式与其他实施例中所述的方面结合。
[0078]
另外,本发明可实施为一种方法,并且已提供其示例。作为该方法的一部分执行的操作可通过任何合适的方式来排序。因此,可构建以不同于所示的顺序执行操作的实施方案,这可包括同时执行某些操作,即使这些操作在各示例性实施方案中被示为顺序操作。
[0079]
在权利要求中使用诸如“第一”、“第二”、“第三”等序数术语修饰权利要求要素,其本身并不意味一个权利要求要素相对于另一个的任何优先权、优先序或顺序或者执行方法操作的时间顺序,而是仅用作将具有某个名称的一个权利要求要素与另一个具有相同名称(除了使用的序数术语)的要素加以区分的标签,以辨别权利要求要素。
[0080]
术语“大约”和“约”在一些实施方案中可用于意味着在目标值的
±
20%以内,在一些实施方案中指在目标值的
±
10%以内,在一些实施方案中指在目标值的
±
5%以内,并且在一些实施方案中指在目标值的
±
2%以内。术语“大约”和“约”可包括目标值。
[0081]
另外,本文所用的短语和术语均是用于说明的目的,并且不应视为限制。本文中所使用的“包括”、“包含”或“具有”、“内含”、“涉及”和它们的变型形式均意味着包含其后所列的项目及其等同物以及额外的项目。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。