1.本发明涉及风电机组测试设备领域,具体涉及一种风电机组传动链加载方法及系统。
背景技术:
2.随着风电机组设计结构尺寸以及额定容量的不断增大,风电机组传动链设计尺寸以及功率输出等级也日益增加。风电机组传动链主要由轮毂、主轴、齿轮箱、联轴器、发电机等构成。
3.风电机组传动链试验平台可针对大型风电机组传动链进行模拟试验,通过模拟风电机组真实的运行工况,对被测风电机组传动链进行动态加载,同时测量传动链各关键部件的运行特性。但是,与风电机组现场试验相比,被测风电机组传动链由于缺少叶轮这一关键载荷输入元件,被测传动链无法感知叶轮气动载荷。难以精准实时模拟叶轮气动载荷是传动链试验平台面临的一大难题。
4.目前,风电机组传动链的性能实验一般依托传动链试验平台开展。由于传动链试验平台造价高昂,运营成本极高,国内大部分建设完成的传动链试验平台,在对被测传动链动力学特性加载方面仅能够通过拖动电机实现扭矩自由度上的加载,无法对其他五个自由度特性进行动态加载,具有模拟准确度低的缺陷。
技术实现要素:
5.本发明的目的是解决加载实时性差和模拟准确度低的问题。
6.本发明的目的是采取下述技术方案来实现的:
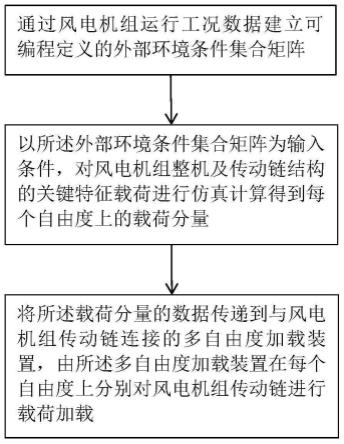
7.一种风电机组传动链加载方法,所述方法包括:通过风电机组运行工况数据建立可编程定义的外部环境条件集合矩阵;以所述外部环境条件集合矩阵为输入条件,对风电机组整机及传动链结构的关键特征载荷进行仿真计算得到每个自由度上的载荷分量;将所述载荷分量的数据传递到与风电机组传动链连接的多自由度加载装置,由所述多自由度加载装置在每个自由度上分别对风电机组传动链进行载荷加载。
8.优选的,所述外部环境条件集合矩阵包括如下参数:风速、空气密度、湍流强度、入流角度、对风误差、以及风切变参数。
9.优选的,所述仿真计算所采用的模型包括bladed模型或者fast模型。
10.优选的,所述多自由度加载装置包括与所述风电机组的主轴配合的加载轴套、与所述加载轴套轴心平行的两个水平液压缸和四个与所述加载轴套轴心垂直的竖直方向液压缸;所述水平液压缸和竖直液压缸的一端铰接固定,所述水平液压缸和竖直液压缸的另一端均与所述加载轴套连接。
11.优选的,所述将所述载荷分量的数据传递到与风电机组传动链连接的多自由度加载装置,包括:将所述载荷分量数据传递到预先设定的加载位置点处;其中,所述加载位置点为所述多自由度加载装置中的加载轴套与所述水平液压缸或竖直液压缸铰接处。
12.优选的,所述由所述多自由度加载装置在每个自由度上分别对风电机组传动链进行载荷加载包括:所述风电机组的轮毂中心位置载荷与所述加载位置点的载荷通过载荷转换公式进行载荷转换得到转换后的各自由度上的载荷;所述多自由度加载装置基于转换后的各自由度上的载荷通过控制参数转换式得到所述水平液压缸和竖直液压缸的控制参数,通过控制所述水平液压缸和竖直液压缸的控制参数对风电机组传动链进行加载,其中所述水平液压缸和竖直液压缸的控制参数包括:油液压力和油液流速。
13.优选的,所述载荷转换公式如下式所示:
[0014][0015]
式中,f
x_position
为x轴方向加载位置点的力;f
y_position
为y轴方向加载位置点的力,f
z_position
为z轴方向加载位置点的力;m
x_position
为x轴方向加载位置点的扭矩,m
y_position
为y轴方向加载位置点的扭矩,m
z_position
为x轴方向加载位置点的扭矩;f
x_hub
为轮毂中心位置x轴方向的力,f
y_hub
为轮毂中心位置y轴方向的力,f
z_hub
为轮毂中心位置z轴方向的力,m
x_hub
为轮毂中心位置x轴方向的扭矩,my
_hub
为轮毂中心位置y轴方向的扭矩,m
z_hub
为轮毂中心位置z轴方向的扭矩;t为坐标转换矩阵。
[0016]
优选的,所述控制参数转换式如下式所示:
[0017][0018]
式中,hc
_horizontal_a
和hc
_horizontal_b
分别为两个水平液压缸的负载,hc
_vertical_a
、hc
_vertical_b
、hc
_vertical_c
、hc
_vertical_d
分别为四个竖直方向液压缸的负载;p为油液压力、d为油液流速;f
x_position
为x轴方向加载位置点的力;f
y_position
为y轴方向加载位置点的力,f
z_position
为z轴方向加载位置点的力;m
x_position
为x轴方向加载位置点的扭矩,m
y_position
为y轴方向加载位置点的扭矩,m
z_position
为x轴方向加载位置点的扭矩;fh
11
为水平油缸hc
_horizontal_a
对应的参数转换矩阵;fh
21
为水平油缸hc
_horizontal_b
对应的参数转换矩阵;fh
31
为竖直油缸
hc_vertical_a
对应的参数转换矩阵;fh
41
为竖直油缸
hc_vertical_b
对应的参数转换矩阵;fh
51
为竖直油缸hc
_vertical_c
对应的参数转换矩阵;fh
61
为竖直油缸hc
_vertical_d
对应的参数转换矩阵。
[0019]
基于同一发明构思本发明还提供了一种风电机组传动链加载系统,所述系统包括:用于存储所述外部环境条件集合矩阵的数据存储装置、与所述数据存储装置连接的仿真运算装置、以及与所述仿真运算装置连接的如上文所述的多自由度加载装置;所述数据存储装置具有与外部数据源连接数据输入和输出接口。
[0020]
优选的,所述自由度加载装置包括液压伺服系统。
[0021]
与现有技术相比,本发明的有益效果为:
[0022]
本发明提供了一种风电机组传动链加载方法,所述方法包括:通过风电机组运行工况数据建立可编程定义的外部环境条件集合矩阵;以所述外部环境条件集合矩阵为输入条件,对风电机组整机及传动链结构的关键特征载荷进行仿真计算得到每个自由度上的载荷分量;将所述载荷分量的数据传递到与风电机组传动链连接的多自由度加载装置,所述多自由度加载装置在每个自由度上分别对风电机组传动链进行载荷加载。本发明通过建立可编程定义的外部环境条件集合矩阵实现对风电机组工作环境的参数化定义和提高工作环境模拟仿真度;通过对风电机组整机及传动链结构的关键特征载荷进行仿真计算得到每个自由度上的载荷分量,实现了对风电机组实际工作环境下全方位动态载荷的多自由度分量拆解和工程化处理;通过所述多自由度加载装置在每个自由度上分别对风电机组传动链进行载荷加载实现了实时加载、准确模拟,同时由于能够实现六自由度动态模拟实际工况的全方位载荷,解决了现有技术仅能在扭矩自由度上模拟的问题,从而提高了模拟准确度。
附图说明
[0023]
图1为本发明一种风电机组传动链加载方法的流程图;
[0024]
图2为本发明风电机组传动链试验平台结构示意图;
[0025]
图3为本发明的多自由度加载装置的结构示意图;
[0026]
其中:1-驱动电机、2-多自由度加载装置、3-风电机组、4-支撑结构、21-加载轴套、22-水平液压缸、23-竖直液压缸、24-固定底座。
具体实施方式
[0027]
下面结合附图和具体实施例对技术方案做进一步说明,以助于理解本发明的内容。
[0028]
实施例1
[0029]
如图1所示,本发明公开了一种风电机组传动链加载方法,所述方法包括:通过风电机组运行工况数据建立可编程定义的外部环境条件集合矩阵;以所述外部环境条件集合矩阵为输入条件,对风电机组整机及传动链结构的关键特征载荷进行仿真计算得到每个自由度上的载荷分量;将所述载荷分量的数据传递到与风电机组传动链连接的多自由度加载装置,所述多自由度加载装置在每个自由度上分别对风电机组传动链进行载荷加载。
[0030]
所述外部环境条件集合矩阵定义为:
[0031][0032]
式中:lcc表示外部环境条件集合矩阵;vi表示时刻i对应的风速;ρi表示时刻i对应的空气密度;tii表示时刻i对应的湍流强度;αi表示时刻i对应的入流角度;βi表示时刻i对应的对风误差;表示时刻i对应的风切变参数。
[0033]
所述仿真计算所采用的模型包括bladed模型或者fast模型。
[0034]
如图2所示,本发明风电机组传动链试验平台的主体结构包括:驱动电机1、通过联轴器与所述驱动电机1连接的多自由度加载装置2、与所述多自由度加载装置2连接的风电机组3、以及用于支撑固定的支撑结构4;所述风电机组3的主轴与所述多自由度加载装置2连接以实现针对叶轮气动载荷精准实时模拟。
[0035]
如图3所示,所述多自由度加载装置2包括与所述风电机组的主轴配合的加载轴套21、与所述加载轴套21轴心平行的两个水平液压缸22和四个与所述加载轴套21轴心垂直的竖直方向液压缸23;所述水平液压缸22和竖直液压缸23的一端与固定底座24铰接固定,另外一端与所述加载轴套21连接。
[0036]
所述加载轴套包括多个用于与所述水平液压缸或竖直液压缸铰接的加载位置点。
[0037]
所述方法包括所述风电机组的轮毂中心位置载荷与所述加载位置点的载荷通过下列公式转换:
[0038][0039]
式中,f
x_position
为x轴方向加载位置点的力;f
y_position
为y轴方向加载位置点的力,f
z_position
为z轴方向加载位置点的力;m
x_position
为x轴方向加载位置点的扭矩,m
y_position
为y轴方向加载位置点的扭矩,m
z_position
为x轴方向加载位置点的扭矩;f
x_hub
为轮毂中心位置x轴方向的力,f
y_hub
为轮毂中心位置y轴方向的力,f
z_hub
为轮毂中心位置z轴方向的力,m
x_hub
为轮毂中心位置x轴方向的扭矩,my
_hub
为轮毂中心位置y轴方向的扭矩,m
z_hub
为轮毂中心位置z轴方向的扭矩;t为坐标转换矩阵。
[0040]
所述水平液压缸和竖直液压缸通过控制油液压力和油液流速实现对加载轴套的加载。
[0041]
所述水平液压缸和竖直液压缸的加载参数由下式确定:
[0042][0043]
式中,hc
_horizontal_a
和hc
_horizontal_b
分别为两个水平液压缸的负载,hc
_vertical_a
、hc
_vertical_b
、hc
_vertical_c
、hc
_vertical_d
分别为四个竖直方向液压缸的负载;p为油液压力、d为
油液流速;f
x_position
为x轴方向加载位置点的力;f
y_position
为y轴方向加载位置点的力,f
z_position
为z轴方向加载位置点的力;m
x_position
为x轴方向加载位置点的扭矩,m
y_position
为y轴方向加载位置点的扭矩,m
z_position
为x轴方向加载位置点的扭矩;fh
11
为水平油缸hc
_horizontal_a
对应的参数转换矩阵;fh
21
为水平油缸hc
_horizontal_b
对应的参数转换矩阵;fh
31
为竖直油缸
hc_vertical_a
对应的参数转换矩阵;fh
41
为竖直油缸
hc_vertical_b
对应的参数转换矩阵;fh
51
为竖直油缸hc
_vertical_c
对应的参数转换矩阵;fh
61
为竖直油缸hc
_vertical_d
对应的参数转换矩阵。
[0044]
本发明提出了基于载荷仿真与加载实时交互模式的风电机组传动链可编程控制风载等值加载方法,通过假定外部环境输入条件,实时仿真计算气动关键特征载荷,进而通过六自由度加载装置等效加载相关的力和力矩,实现不同外部环境条件下风电机组传动链动态等值加载,通过多自由度加载装置实现对风电机组主轴的六自由度动态加载,为风电机组传动链特性的精准测量奠定基础。
[0045]
实施例2
[0046]
本发明公开了一种风电机组传动链加载系统,所述系统包括:用于存储如实施例1所述的外部环境条件集合矩阵的数据存储装置、与所述数据存储装置连接的仿真运算装置、以及与所述仿真运算装置连接的如实施例1所述的多自由度加载装置;所述数据存储装置具有数据输入和输出接口。
[0047]
所述自由度加载装置包括液压伺服系统。
[0048]
所述系统以实现传动链试验平台高效精准动态实时加载,下面对可编程控制风载等值加载方案具体步骤给出相关说明:
[0049]
(1)外部环境参数可编程自定义
[0050]
在该环节主要定义风电机组传动链需要模拟的运行工况对应的外部环境条件,主要包括风速、空气密度、湍流强度、入流角度、对风误差、风切变参数等影响风电机组整机及传动链载荷的关键特征参数。假定某一时刻,外部环境条件可定义为:
[0051][0052]
式中lcc表示外部环境条件集合矩阵;vi表示仿真时刻i对应的风速;ρi表示仿真时刻i对应的空气密度;tii表示仿真时刻i对应的湍流强度;αi表示仿真时刻i对应的入流角度;βi表示仿真时刻i对应的对风误差;表示仿真时刻i对应的风切变参数。
[0053]
(2)被测风电机组模型
[0054]
被测风电机组模型是指匹配被测传动链的风电机组载荷仿真模型,模型可以是bladed模型,或者fast模型,通过模型匹配的载荷仿真控制器,以模拟的运行工况对应的外部环境条件参数为输入条件,对风电机组整机及传动链结构在该环境条件下的关键特征载荷进行仿真计算。此处计算模型采用高度线性化模型,减少迭代仿真次数,增强仿真输出能力。
[0055]
(3)风电机组轮毂六自由度载荷
[0056]
经过匹配被测传动链的风电机组载荷仿真模型,仿真计算得到传动链前端结构,即轮毂中心位置的六自由度载荷,主要包含f
x_hub
,f
y_hub
,f
z_hub
,m
x_hub
,m
y_hub
,m
z_hub
等六个自由度载荷分量。
[0057]
(4)被测传动链加载位置点六自由度载荷
[0058]
考虑到风电机组传动链加载位置点与风电机组轮毂中心位置之间可能存在的空间坐标差异,运用坐标转换的方式将轮毂中心位置的六自由度载荷转换为传动链加载点位置的六自由度载荷,主要包含f
x_position
,f
y_position
,f
z_position
,m
x_position
,m
y_position
,m
z_position
等六个自由度载荷分量。
[0059][0060]
式中,t为坐标转换矩阵。
[0061]
(5)六自由度载荷与液压加载参数转换器
[0062]
本发明设计的液压加载装置配置六个液压缸,其中两个水平液压缸hc
_horizontal_a
和hc
_horizontal_b
,四个竖直方向液压缸,hc
_vertical_a
、hc
_vertical_b
、hc
_vertical_c
、hc
_vertical_d
。
[0063]
每个液压缸对应的物理参数分别包括油液压力p、油液流速d等典型特征参数。针对油缸的控制,需要通过控制油液压力和油液流速实现。
[0064][0065]
式中,fh
11
为水平油缸;hc
_horizontal_a
对应的参数转换矩阵;fh
21
为水平油缸;hc
_horizontal_b
对应的参数转换矩阵;fh
31
为竖直油缸;hc
_vertical_a
对应的参数转换矩阵;fh
41
为竖直油缸;hc
_vertical_b
对应的参数转换矩阵;fh
51
为竖直油缸;hc
_vertical_c
对应的参数转换矩阵;fh
61
为竖直油缸;hc
_vertical_d
对应的参数转换矩阵。
[0066]
至此,与设计运行工况匹配的液压加载装置各个油缸预定义参数完成计算和解调,由加载控制伺服系统将加载指令下达给各油缸驱动机构予以执行,从而实现某一时刻工况的模拟加载。对于一个特定仿真时长的仿真历程,仅需不断重复上述步骤即可实现精准模拟和等值。
[0067]
其它未述及的必要技术描述与实施例1相同,故不再赘述。
[0068]
本发明提出了一种基于载荷仿真与加载实时交互模式的风电机组传动链可编程控制风载等值加载方法及系统,实现风电机组传动链试验平台六自由度载荷精准模拟与加载,大幅提升传动链试验准确度和效率水平,对于优化风电机组传动链结构设计,提升风电机组的运行可靠性,保障机组及电网安全稳定运行具有重要意义。
[0069]
以上仅为本发明的实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均包含在申请待批的本发明的权利要求范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
