1.本技术涉及商用车换电技术领域,尤其涉及一种用于换电平台的停车定位辅助系统。
背景技术:
2.随着电动铰接式牵引车的大规模量产,牵引车的换电平台或换电仓也逐渐投入市场。当前市场上铰接式牵引车-挂车的换电平台需要车辆被精准驾驶停在换电区域正上方的一定误差范围内,然后才能进行换电。
3.相关技术中,铰接式牵引车-挂车的换电平台对车辆驶入换电平台没有配套定位或辅助定位设备,全靠车辆被驾驶员精准驾驶停在换电区域正上方的一定误差范围内。此外,虽然有些铰接式牵引车-挂车的换电平台配套了夹紧设备,可以在车辆精准停在换电区域正上方一定误差范围后,在这个误差范围内防止换电过程中车辆有纵向移动,但是这对于车辆驶入换电平台并精准停在换电区域正上方没有显著帮助。
技术实现要素:
4.本技术实施例提供了用于换电平台的停车定位辅助系统,以精准化停车换电流程,使得车辆停靠后的换电部准确地定位在换电平台的换电区域。
5.本技术实施例采用下述技术方案:
6.第一方面,本技术实施例提供一种用于换电平台的停车定位辅助系统,其中,所述系统包括:阻力设备、感知定位设备,所述阻力设备与所述感知定位设备通讯,换电前,在车辆驶入所述换电平台的过程中通过所述感知定位设备感知到目标车轮已到达目标位置后,通过所述阻力设备向未到达所述目标位置的车轮提供相应的阻力,以使车辆制动且车辆上的待换电部停止在所述换电平台的换电区域。
7.在一些实施例中,所述车辆包括牵引车以及挂车,所述牵引车通过挂车铰接柱与所述挂车相连,所述车辆的待换电部位于所述牵引车的底部,所述目标车轮包括:
8.位于所述牵引车末端的一副车轮。
9.在一些实施例中,所述未到达所述目标位置的车轮,包括:位于所述挂车的至少一副车轮。
10.在一些实施例中,所述目标位置包括:
11.所述牵引车末端的一副车轮已到达所述换电平台时的位置,所述换电平台与水平地面之间具有高度差。
12.在一些实施例中,所述阻力设备包括:设备变形动力舱、横梁、纵梁以及推力杆,所述设备变形动力舱通过驱动所述横梁以使所述横梁按照预设方向伸出或缩回,所述纵梁设置在所述推力杆的端部且与车轮直接接触,其中所述横梁伸出展开时,所述纵梁也在所述推力杆的驱动下展开,且伸出展开的速度与所述纵梁伸出的速度匹配。
13.在一些实施例中,所述设备变形动力舱中包括由电机或液压驱动的连杆机构,和/
或,由电机或液压驱动的带传动机构。
14.在一些实施例中,所述车辆为挂车,所述横梁包括两片钢板结构,且每一片钢板结构的宽度大于所述挂车的第一副车轮的宽度;
15.或者,所述横梁包括一片钢板结构,且所述钢板结构的宽度大于所述挂车的左、右侧车轮外侧的距离。
16.在一些实施例中,所述车辆为挂车,所述纵梁包括包括两片钢板结构,且每一片钢板结构的宽度大于所述挂车的第一副车轮的宽度;
17.或者,所述纵梁包括一片钢板结构,且所述钢板结构的宽度大于所述挂车的左、右侧车轮外侧的距离,所述车辆为挂车。
18.在一些实施例中,所述车辆包括牵引车以及挂车,所述阻力设备中的所述横梁可伸缩且伸出时的速度vs与所述车辆当前速度vv满足如下条件:
19.s1/vv》s2/vs20.其中,s2为所述牵引车第三轴到所述挂车第一轴的距离减去所述牵引车第三轴到所述换电平台的入口坡终点的距离s1。
21.在一些实施例中,所述感知定位设备设置于所述换电平台内,所述阻力设备与所述感知定位设备之间通讯连接。
22.本技术实施例采用的上述至少一个技术方案能够达到以下有益效果:
23.通过所述阻力设备以及所述感知定位设备,在车辆驶入所述换电平台的过程中通过所述感知定位设备感知到目标车轮已到达所述目标位置后,通过所述阻力设备向未到达所述目标位置的车轮提供相应的阻力。从而在换电时使车辆制动且车辆上的待换电部停止在所述换电平台的换电区域。
24.用于换电平台的停车定位辅助系统,结构简单,造价低廉,易于安装,使用方便。
附图说明
25.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
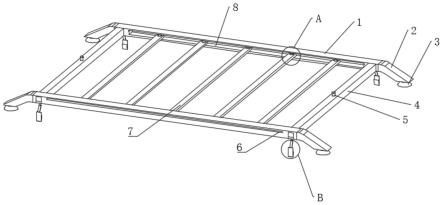
26.图1为本技术实施例中用于换电平台的停车定位辅助系统的结构示意图;
27.图2为本技术实施例中用于换电平台的停车定位辅助系统的尺寸标注示意图;
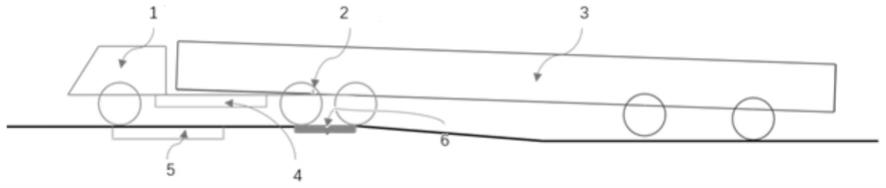
28.图3为本技术实施例中用于换电平台的停车定位辅助系统中换电状态示意图(行驶过程);
29.图4为本技术实施例中用于换电平台的停车定位辅助系统换电状态示意图(最终停靠)。
具体实施方式
30.为使本技术的目的、技术方案和优点更加清楚,下面将结合本技术具体实施例及相应的附图对本技术技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
31.以下结合附图,详细说明本技术各实施例提供的技术方案。
32.如图1所示,包括牵引车1、挂车铰接柱2、挂车3、待换电部(电池)4、换电区域5、感知定位设备6、设备变形动力舱7(位于感知定位设备6下方或者可设置于感知定位设备6内部)、横梁8、纵梁9、推力杆10。所述感知定位设备6位于换电平台内。
33.本技术实施例提供了一种用于换电平台的停车定位辅助系统,如图1所示,提供了本技术实施例中用于换电平台的停车定位辅助系统结构示意图,所述系统包括:阻力设备(未示出,包括但不限于设备变形动力舱7、横梁8、纵梁9、推力杆10组成的结构)、感知定位设备6,所述阻力设备与所述感知定位设备6连接。
34.在一些实施例中,所述阻力设备与所述感知定位设备可一体化设计,或者采用分体式模块设计,在本技术的实施例中并不进行具体限定。
35.换电前,在车辆驶入所述换电平台的过程中通过所述感知定位设备6感知到目标车轮已到达目标位置后,通过所述阻力设备向未到达所述目标位置的车轮提供相应的阻力,以使车辆制动且车辆上的待换电部停止在所述换电平台的换电区域5。
36.需要注意的是,“目标位置”具体是牵引车的最后一副车轮到达时阻力设备开始伸展的目标位置,并不是牵引车最终停车时牵引车的最后一副车轮所在的位置。在此位置之后,阻力设备在伸展的过程中车辆还在往前走。也就是说,“目标位置”并不是最后的停车位置,而是触发阻力设备启动的位置。
37.具体实施时,换电时通过所述感知定位设备6对车轮位置进行感知,比如当通过所述感知定位设备6(可以是红外传感器、压力传感器,在本技术的实施例中并不进行具体限定)感知到目标车轮已到达所述目标位置之后,激活所述阻力设备启动并向未到达所述目标位置的车轮提供相应的阻力。需要注意的是,由于此时车辆与所述阻力设备会进行相对运动,两者的速度需要满足一定条件时,才能够通过所述阻力设备向未到达所述目标位置的车轮提供相应的阻力,并在最终使车辆制动且车辆上的待换电部停止在所述换电平台的换电区域5,如图4所示。
38.可以理解,这里既需要制动停车,又需要使得待换电部停止在所述换电平台的换电区域5内。
39.进一步地,通过所述阻力设备向未到达所述目标位置的车轮提供相应的阻力,阻止车辆向前过多的行进。然后使车辆制动且车辆上的待换电部停止在所述换电平台的换电区域5。
40.优选地,使车辆制动且车辆上的待换电部停止在所述换电平台的换电区域之前还需要换电的牵引车-挂车通过自动驾驶或人工驾驶方式从换电平台的入口坡开上换电平台,且开上平台的入口坡以前牵引车挂车都已经顺正。即不需要多余的倒车、位置选择等驾驶操作。
41.优选地,所述感知定位设备设置于所述换电平台内,所述阻力设备与所述感知定位设备之间通讯连接。可以理解,所述阻力设备可以根据所述感知定位设备的感知结果,向车辆施加阻力。同时,所述感知定位设备隐藏(可以通过透明隔板或者其他方式)设置于所述换电平台内。
42.本技术实施例中的系统,可适用于牵引车1和挂车3且以铰接2连接的、电驱动、且能换电的车辆。单独牵引车上平台去换电的换电平台,并不在本技术的保护范围。
43.本技术实施例中的系统,适用于牵引车带挂上平台去换电的换电平台。乘用车的
换电平台并不在本技术的保护范围。
44.本技术实施例中的系统,适用于牵引车第三轮或第二轮从入口坡驶入水平平台的时机为人工观察,或传感器设备观测。其他铰接类型的牵引车机和拖车机,或其他类似的电池包驱动的移动车机,并不在本技术的保护范围。
45.在本技术的一个实施例中,所述车辆包括牵引车以及挂车,所述牵引车通过挂车铰接柱与所述挂车相连,所述车辆的待换电部4位于所述牵引车的底部,所述目标车轮包括:位于所述牵引车末端的一副车轮。
46.对于车辆以铰接式牵引车-挂车为例,所述车辆包括牵引车1以及挂车3,所述牵引车1通过挂车铰接柱2与所述挂车3相连,所述车辆的待换电部位于所述牵引车1的底部。
47.作为一种可选地实施方式,在确定目标车轮时,将位于所述牵引车末端的一副车轮作为确定目标位置的参照物,也就是说在车辆驶入所述换电平台的过程中通过所述感知定位设备6感知到目标车轮已到达所述目标位置。当位于所述牵引车末端的一副车轮到达目标位置后,系统判断需要启动阻力设备。
48.可以理解,如果能提前确定需要换电的牵引车有几根轴,即可以提前知道换电的牵引车的这几根轴之间的几何关系。也就是说不论感知哪一根轴,只要通过牵引车挂车和换电平台之间的几何关系,确定出满足牵引车的某一基准点被识别到,作为阻力设备开启的信号,且阻力设备的打开速度和车辆的行驶速度满足前者更快的要求,均属于本技术的保护范围。
49.在本技术的一个实施例中,所述未到达所述目标位置的车轮,包括:位于所述挂车的至少一副车轮。
50.具体实施时,对于所述车辆继续以铰接式牵引车-挂车为例,在确定未到达所述目标位置的车轮即确定出位于所述挂车的至少一副车轮。即这些位于所述挂车的至少一副车轮是需要阻力设备施加阻力的。
51.在本技术的一个实施例中,所述目标位置包括:所述牵引车末端的一副车轮已到达所述换电平台时的位置,所述换电平台与水平地面之间具有高度差。
52.确定所述目标位置时,需要确定根据所述牵引车末端的一副车轮已到达所述换电平台时的位置。同时,在车辆的牵引车行驶到换电平台时,在所述换电平台与水平地面之间具有高度差。
53.在本技术的一个实施例中,所述阻力设备包括:设备变形动力舱7、横梁8、纵梁9以及推力杆10,所述设备变形动力舱通过驱动所述横梁以使所述横梁按照预设方向伸出或缩回,所述纵梁设置在所述横梁的的端部且与车轮直接接触,其中所述横梁伸出展开时,所述纵梁也在所述推力杆的驱动下展开,且伸出展开的速度与所述纵梁伸出的速度匹配。
54.如图3所示,设备变形动力舱7、横梁8、纵梁9以及推力杆10可以整体作为所述阻力设备,亦或,其中的多个设备组合得到的功能作为所述阻力设备。优选地,所述推力杆10包括电机或液压驱动的伸缩杆。
55.所述横梁伸出展开时,所述纵梁也在所述推力杆的驱动下展开,且伸出展开的速度与所述纵梁伸出的速度匹配。
56.在本技术的一个实施例中,所述设备变形动力舱中包括由电机或液压驱动的连杆机构,和/或,由电机或液压驱动的带传动机构。
57.设备变形动力舱7中的具体传动形式,包括电机或液压驱动的连杆机构,或电机或液压驱动的带传动机构。
58.在本技术的一个实施例中,所述纵梁包括两片钢板结构,且每一片钢板结构的宽度大于所述挂车的第一副车轮的宽度,或者,所述横梁包括一片钢板结构,且所述钢板结构的宽度大于所述挂车的左、右侧车轮外侧的距离。
59.所述纵梁9,可以是一片或两片钢板结构,如果是两片钢板结构,则每片钢板结构宽度大于所述挂车的第一副车轮的宽度。如果是一片钢板结构,则所述钢板结构的宽度大于所述挂车的左、右侧车轮外侧的距离。
60.在本技术的一个实施例中,所述纵梁包括包括两片钢板结构,且每一片钢板结构的宽度大于所述挂车的第一副车轮的宽度;或者,所述纵梁包括一片钢板结构,且所述钢板结构的宽度大于所述挂车的左、右侧车轮外侧的距离。
61.所述横梁8,可以是一片或两片钢板结构,如果是两片钢板结构,则每片钢板结构宽度大于所述挂车的第一副车轮的宽度。如果是一片钢板结构,则所述钢板结构的宽度大于所述挂车的左、右侧车轮外侧的距离。
62.在本技术的一个实施例中,所述车辆包括牵引车以及挂车,所述阻力设备中的所述横梁可伸缩且伸出时的速度vs与所述车辆当前速度vv满足如下条件:
63.s1/vv》s2/vs64.其中,s2为所述牵引车第三轴到所述挂车第一轴的距离减去所述牵引车第三轴到所述换电平台的入口坡终点的距离s1。
65.需要注意的是,用于换电平台的停车定位辅助系统的横梁和纵梁伸展速度较快,具体实施时需要注意操作安全。
66.本技术实施例中的用于换电平台的停车定位辅助系统的实现原理如下,以牵引车-挂车为例进行详细说明:
67.首先,当需要换电的牵引车-挂车的自动驾驶或人工驾驶从换电平台的入口坡开上换电平台,开上平台的入口坡以前牵引车挂车都已经顺正;
68.其次,当所述牵引车的最后一副车轮驶上平台水平面后,立刻启动隐藏在感知定位设备6中的动力系统(阻力设备)。
69.然后,随着车辆继续行驶,横梁8逐渐伸出,横梁8伸出的速度应大于车辆行驶的速度,保证车辆在驶入换电区域正上方以前,横梁8就伸出完毕。阻力设备中的所述横梁可伸缩且伸出时的速度vs与所述车辆当前速度vv满足如下条件:
70.s1/vv》s2/vs71.其中,如图2所示s1,s2如尺寸标注图所示,vv表示车辆速度,vs表示停车定位辅助设备伸展速度。
72.进一步地,所述横梁8伸缩的同时,所述纵梁9也在所述推力杆10和它的动力驱动下展开,它展开的速度应该匹配纵梁9伸出的速度,横梁8伸出到位的时候,纵梁9完全展开,纵梁9的下端正好贴合地面,保证挂车第一轴的轮子顶住横梁8和纵梁9的时候,有足够的支撑力阻碍车辆运动。
73.最后,自动驾驶或者人工驾驶感受到车辆运动受阻,立刻踩下制动,然后执行其他停车操作。实际上,就是借助阻力设备将挂车卡住,使其能够精确停车在换点区域的正上
方,避免换电前驾驶的难度。如果是无人驾驶,更能大大提高车辆控制的精度。
74.以上所述仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。