用于生成阶段性正畸矫治器处理的系统
背景技术:
1.正畸处理规划过程的目标是:在牙齿处理前位置处于咬合不正状态的情况下,确定人牙齿的处理后位置(设置状态)应在何处。该过程通常使用交互式软件手动执行,并且是非常耗时的过程。此外,处理过程可能会改变,需要改变设置状态。因此,需要一种用于生成初始设置和最终设置之间的设置阶段的子集的算法。
技术实现要素:
2.一种用于生成正畸矫治器处理的一部分阶段的计算机实现的方法,该方法包括接收咬合不正的牙齿的数字3d模型,并且为该牙齿的矫治器处理生成设置阶段的完整集合中的设置阶段的子集。
3.一种用于生成正畸矫治器处理的设置的计算机实现的方法,该方法包括接收咬合不正的牙齿的数字3d模型。该方法使用已经使用历史设置训练的机器学习模型来为咬合不正的牙齿的该数字3d模型生成提议的最终设置或中间设置。
附图说明
4.图1是用于接收和处理基于3d扫描图的数字模型的系统的图表。
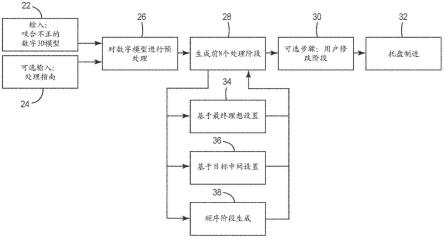
5.图2是用于生成阶段性矫治器处理的方法的流程图。
6.图3是用于生成矫治器处理的最终设置的模型开发和训练方法的流程图。
7.图4是用于生成矫治器处理的最终设置的模型部署方法的流程图。
8.图5示出了侧视图中的数字最终设置。
具体实施方式
9.概述
10.实施方案包括计算机化系统,用于生成完整矫治器处理的一部分阶段。系统采用咬合不正的数字三维(3d)模型作为输入。可选输入包括处理指南,诸如多个阶段、牙齿移动量或处理策略,或它们的任何组合。然后,数字3d模型经历任何必要的预处理,该预处理可以包括数据清理、牙齿分割和牙齿坐标系识别。接下来,从经预处理的扫描图生成前n个处理阶段。在将数字数据发送到用于托盘制造的制造过程之前,系统的用户可以任选地对处理进行修改。
11.实施方案还包括深度学习模型,以根据牙齿的咬合不正位置自动生成数字设置。此过程可以分为两个步骤:模型开发和训练以及模型部署。在模型训练期间,患者咬合不正和设置的许多数字3d模型被输入到深度学习模型中,该深度学习模型被优化以学习最小化预测设置和实际设置之间的差异的模式。在模型部署期间,经训练的深度学习模型用于为新病例数据生成设置预测。
12.图1是用于接收和处理基于口内3d扫描图的数字3d模型的系统10的图表。系统10包括处理器20,该处理器接收牙齿(12)的来自口内3d牙齿扫描图或牙齿印模扫描图的数字
3d模型。系统10还可包括电子显示装置16(诸如液晶显示器(lcd)装置)以及用于接收用户命令或其他信息的输入装置18。在美国专利第7,956,862号和第7,605,817号中公开了基于来自多个视图的图像集来生成数字3d图像或模型的系统,这两个专利都如同全文陈述一样以引用方式并入本文。这些系统可使用口内扫描仪来从牙齿或其他口内结构的多个视图中获得数字图像,并且处理这些数字图像以生成表示扫描的牙齿的数字3d模型。系统10可以用例如台式计算机、笔记本计算机或平板计算机来实现。系统10可通过网络从本地或从远程接收3d扫描图。
13.矫治器处理的阶段
14.典型的矫治器处理规划工作流程基于设计牙齿的理想最终位置(最终设置),然后设计用于制造托盘阶段的集合,该阶段的集合将牙齿从初始设置移动到最终设置。在一些替代工作流程中,可优选地仅设计实现某一处理目标的矫治器托盘的子集。例如,正畸师可能希望使用不同的工作流程来设计几个处理阶段,以在尝试更复杂的移动之前在牙齿之间创造空间。
15.图2是用于生成阶段性矫治器处理的方法的流程图。该方法可以软件或固件实现以便由处理器20执行。该方法接收咬合不正的牙齿的数字3d模型作为输入(22),并且任选地输入处理指南(诸如上文所识别的那些处理指南)(步骤24)。对咬合不正的数字3d模型进行预处理(步骤26),并且生成前n个处理阶段(步骤28)。用于仅创建完整矫治器处理(n个阶段)的一部分的几种算法方法包括基于理想最终设置(步骤34)或目标中间设置(步骤36)或顺序阶段生成(步骤38)的方法。在生成n个处理阶段之后,用户可以任选地修改阶段(步骤30)。基于所生成的n个阶段制造矫治器托盘(步骤32)。
16.以下是基于这些方法生成和可能仅制造完整矫治器处理的一部分的算法方法。
17.方法1:基于最终理想设置(步骤34)。
18.这个问题的一种方法涉及创建最终理想设置和所有中间阶段。然后将仅选择阶段的子集(m个阶段中的前n个阶段,或在最终设置和中间阶段中达到处理目标的阶段)并将该阶段的子集制造成相应的矫治器。
19.方法2:基于目标中间设置(步骤36)。
20.可以创建实现期望的牙齿移动的集合的目标中间设置,而不是使用最终理想设置。然后可以生成和制造咬合不正和目标设置之间的所有中间阶段。此目标中间设置可以由用户(医生或技术人员)手动创建,或者在算法上创建。示例性算法方法包括如下:
21.算法1:给定期望实现的移动的集合,该算法可以将这些移动应用于任何咬合不正。例如,如果期望扩张来创建空间,则该算法将向牙齿施加输入量的牙冠扭矩和/或体扩张。此算法可以使用基于规则的方法来生成从咬合不正到目标中间设置的设置。用于生成设置的基于规则的方法的示例在pct专利申请公布wo 2019/069191中公开,该专利申请公布如完全示出的那样以引用方式并入本文。
22.算法2:一种优化算法,该算法基于优化经历pct专利申请公布wo 2020/026117中描述的受一些约束的度量的集合来创建设置,该专利申请公布如完全示出的那样以引用方式并入本文。可以修改这些度量和约束以创建目标中间设置。例如,该算法可以增加对牙齿移动的约束,这将导致将牙齿移动小于最终设置允许的量的设置。该算法还可以修改度量以惩罚最初可能难以实现的某些类型的移动(例如,根扭矩)并促进期望的移动类型(例如,
扩张)。可以利用这些经修改的约束和度量来运行优化算法以创建最佳目标设置。表1提供了用于生成这种基于优化的方法的最终设置的示例性伪码。
[0023][0024][0025]
用于此方法的方法可以修改度量(改变评分函数中的惩罚项)和/或约束(改变约束函数)以创建目标中间设置。例如:
[0026]
1.约束:增加对牙齿移动的约束,这将产生将牙齿移动小于最终设置允许的量的设置。该约束函数将牙齿从当前状态移动到其中咬合不正状态与当前状态之间的移动小于一定量的位置。
[0027]
2.度量:惩罚可能难以首先实现的某些类型的移动(例如,根扭矩)。评分函数中的惩罚项将测量这些移动类型的牙齿移动量。促进期望的移动类型(例如,扩张)。惩罚项将通过测量当前移动与理想量相比少多少来惩罚小于阈值量的移动。
[0028]
可以利用这些经修改的约束和度量来运行优化算法以创建最佳目标设置。
[0029]
算法3:给定来自先前处理的患者的中间目标设置集,可以训练机器学习模型以生成中间目标设置。鉴于新患者病例的咬合不正,然后可以使用这种经训练的模型来生成用于新病例的定制中间目标设置。
[0030]
方法3:顺序阶段生成(步骤38)。
[0031]
鉴于咬合不正位置中的牙齿的集合,可以生成从初始咬合不正(阶段1)移位的牙齿的后续集合。根据阶段1,可以生成阶段2,并且生成更多阶段直到生成期望数量的阶段为止。以下详述了用于按顺序生成阶段的示例性算法方法。
[0032]
算法1:给定期望实现并且考虑到每阶段的牙齿移动限制的移动的集合,算法可以将这些移动应用于咬合不正以及已经生成的任何后续阶段。
[0033]
算法2:可以修改上述优化算法(方法2、算法2、约束)上详述的对牙齿移动的约束,以反映每阶段的牙齿移动限制。具体地:
[0034]
约束:增加对牙齿移动的约束,这将产生移动牙齿不超过连续状态之间允许的量的新状态。该约束函数将牙齿从当前状态移动到其中先前状态与当前状态之间的移动小于一定量的位置。
[0035]
然后可以在咬合不正或任何阶段运行优化算法以生成下一阶段。
[0036]
算法3:给定来自先前处理的患者的中间阶段的设置,可以训练机器学习模型以从当前阶段生成下一中间阶段。对于此算法3,不需要生成目标设置;相反,这些阶段是按顺序从一个到下一个生成的。
[0037]
用于设置生成的机器学习
[0038]
用于确定最终设置的基于优化的方法描述于pct专利申请公布wo 2020/026117中。该方法包括通过尝试优化与诸如中线、类关系、对准等良好最终设置相关的质量度量的分数来到达最终设置的方法。该方法可以更直接地改变以适合特定方案改变、需要或偏好的需要。例如,如果需要减少根移动,则可以增加与根移动相关的成本函数的惩罚或权重。然而,使用此算法对更复杂的移动进行编程可能是具有挑战性的。
[0039]
图3是用于生成矫治器处理的最终设置的模型开发和训练方法的流程图。图4是用于生成矫治器处理的最终设置的模型部署方法的流程图。这些方法可以软件或固件实现以便由处理器20执行。开发和训练方法接收咬合不正的数字模型和用于历史病例数据的设置作为输入(步骤40)。任选地生成来自3d模型的特征(步骤42)。该方法训练深度学习模型(步骤44)以生成经训练的深度学习模型(步骤46)并根据地面真实设置数据评估设置预测(步骤48)。该部署方法接收新病例的咬合不正的数字3d模型作为输入(步骤50)。任选地生成来自3d模型的特征(步骤52)。该方法运行由图3的方法生成的经训练的深度学习模型56(步骤54)以生成提议的设置(步骤58)。
[0040]
随着获取更多数据,机器学习方法和特别是深度学习方法的性能开始达到或超过显式编程方法的性能。深度学习方法的显著优点在于消除了对手工特征的需求,因为其能够通过训练过程直接从数据推断使用较高维潜在或隐藏特征的非线性函数的组合来推断有用的特征。虽然尝试解决最终设置问题,但是可能期望直接操作咬合不正3d网格。诸如pointnet、pointcnn和meshcnn等方法可以解决这个问题。
[0041]
另选地,可以将来自图3和图4的方法的深度学习应用于经处理的网格数据。例如,可以在全口的网格已经被分割到单颗牙齿之后应用深度学习,并且已经定义了典型牙齿坐标系。在此阶段,可以获得有用的信息,诸如牙齿位置、取向、牙齿的尺寸、牙齿之间的间隙等。牙齿位置是在一些语义上下文中定义的牙齿典型原点位置的笛卡尔坐标。牙齿取向可以表示为旋转矩阵、四元数或另一个3d旋转表示,诸如相对于全局参照系的欧拉角。尺寸是实值3d空间范围,并且间隙可以是二元存在指示器或牙齿之间的实值间隙尺寸,尤其是在某些牙齿缺失的情况下。深度学习方法可以轻松使用各种异质特征类型。在此特征空间中,即使简单的多层感知模型也是有用的,并且可能是足够的。另选地,也可以使用不限于但包括正则化自动编码器、变量自动编码器或生成式对抗神经网络的方法。目标是使用错误位
置可用的特征来预测设置位置中牙齿的位置和取向。由于尺度和灵敏度的差异,期望特殊的损失函数来加权位置和取向误差。另外,可以在训练过程期间应用缩放。这些模型使用训练集进行训练,该训练集在验证集上进行比较以选择最佳模型。评估最佳模型的失集或泛化性能。
[0042]
通过利用属于该类别的数据(例如特定医生的数据或仅扩张前牙病例的数据)训练模型,可以轻松实现这些模型执行不同类型的处理计划的定制。
[0043]
图5示出了来自深度学习方法的数字最终设置的侧视图。可以例如在电子显示装置16上的用户界面中显示图5所示的数字设置。
[0044]
固定的牙齿和夹紧的牙齿
[0045]
在生成设置时,通常需要不移动某些牙齿。如果牙齿被标记为固定的,则它可能不从其在患者口腔中的原始位置移动。如果牙齿被标记为夹紧的,则它可能不从某个位置移动。本文所描述的深度学习算法学习生成类似于由其他人进行的设置的设置,而无需保证固定的牙齿和夹紧的牙齿保持不移动。将固定的牙齿和夹紧的牙齿保持在适当位置的一种可能方法是调整机器学习损失函数中的lambdas,使得其严重惩罚技术人员已经指定为固定或夹紧的牙齿的移动。在此类损失函数中,牙齿被划分为两组-固定的牙齿或夹紧的牙齿(由输入向量中的1.0的值指示)和没有固定的牙齿或夹紧的牙齿(以输入向量中的0.0的值指示)。在训练期间,通过计算技术人员放置的地面真实位置与神经网络在训练期间生成的位置之间的牙齿位置差异的均方误差(mse)分别计算每个组的损失。然后,当计算总损失时,将与固定的牙齿和夹紧的牙齿有关的mse乘以lambda加权因子。在表2中提供此方法的方程式。
[0046][0047]
此方法不能保证固定的牙齿和夹紧的牙齿不移动,因此在由神经网络生成设置之后,固定的牙齿和夹紧的牙齿移动回其正确位置。期望的结果是固定的牙齿和夹紧的牙齿移动足够小的量,使得将它们移回原位不会引起与另一颗牙齿碰撞的大问题。在训练期间增加lambda的值不应很大程度上影响由深度学习算法生成的牙齿的位置。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。