1.本发明涉及手术床领域,具体涉及一种多体位神经外科手术床。
背景技术:
2.神经外科是用外科学方法,以手术为主要治疗手段治疗脑、脊髓和周围神经系统疾病的学科,是目前医学领域中的一门高、精、尖学科,被公认为医学地位最高的领域;神经外科中的肿瘤、血管、间盘摘除等手术都是在大型手术显微镜下进行的显微外科手术,手术极为精细、复杂、危险、耗时,不仅要求医务人员具有较好的技术和体力,对患者也具有很大的挑战;在手术过程中患者均处于麻醉状态,在麻醉状态下患者均处于被动卧位,而大型神经外科手术往往需要几个小时甚至十几个小时,因此,患者就需要面临一个很棘手的问题
‑‑
压力性损伤。
3.压力性损伤是发生在皮肤或皮下组织的局限性损伤,通常发生在骨隆突处或长时间受压的部位,可表现为局部组织受损但表皮完整或开放性溃疡,并伴有疼痛,手术中患者所受到的压力性损伤多在术后1-3天表现出损伤症状;术中压力性损伤与手术时间成正相关,患者保持一个手术体位持续2小时以上即可能发生不可逆损伤,每延长30分钟压力性损伤发生率增加33%,持续4小时将不可避免地发生压力性损伤;现有技术条件下,为预防患者出现压力性损伤,需采用多种硅胶软垫对患者不同位置进行静态铺垫,软垫种类数量甚至多达数十种,不仅操作繁琐,长时间垫压软垫同样会出现不同程度的压力性损伤,因此,研发一种应用于神经外科手术并可避免患者出现压力性损伤的手术床具有明显的意义。
技术实现要素:
4.为解决现有技术的不足,本发明的目的在于提供一中智能化程度高、效果好的神经外科手术床。
5.本发明采取的技术方案为:一种多体位神经外科手术床,包括床体机构、头部固定机构、支撑单元。
6.作为优选,床体机构中的床架可稳定放置于地面,右身支撑台上设置有由支撑单元阵列构成的右身支撑区域并与床架转动连接,右臂支撑台上设置有由支撑单元阵列构成的右臂支撑区域并与右身支撑台转动连接,左身支撑台上设置有由支撑单元阵列构成的左身支撑区域并与床架转动连接,左臂支撑台上设置有由支撑单元阵列构成的左臂支撑区域并与左身支撑台转动连接,横移支撑台上设置有由支撑单元阵列构成的横移支撑区域并与床架构成移动副。
7.作为优选,头部固定机构安装于床架前端并构成移动副,其中的头枕外侧包覆有软质硅胶表面并安装于滑台上侧中间位置,左夹板右侧为包覆软质硅胶的弧面结构,右夹板与左夹板成左右对称结构,左夹板和右夹板安装于头枕两侧并均与滑台构成移动副,手轮可控制左夹板和右夹板的移动,以实现对患者头部的固定和放松。
8.作为优选,支撑单元中的方体外侧为方形结构,内部设有阶梯方孔,电机固定安装
于方体内部且其输出轴内部设有内螺纹,顶杆安装于方体内部并构成移动副,顶杆下端的螺纹杆与电机输出轴的内螺纹配合构成螺纹副,顶帽安装于顶杆上端,并且两者之间设有压力传感器,摆动板通过十字轴与顶帽转动连接,摆动板上侧固定连接有四个硅胶垫,弹簧安装于摆动板与顶帽之间。
9.作为优选,左身支撑台、右身支撑台的翻转动作和横移支撑台的横移动作均可根据手术需要由上位机进行控制,各个支撑区域中的支撑单元阵列可由上位机进行智能调节。
10.作为优选,手术床上设置有五个可调节松紧的绑带,分别用于固定患者的胸部、左臂、右臂、大腿、小腿。
11.作为优选,弹簧穿过十字轴中心的圆孔并安装于摆动板与顶帽之间,可使摆动板在自然状态下始终保持水平状态。
12.作为优选,摆动板、十字轴、顶帽构成具有两个转动自由度的虎克铰结构,摆动板上侧的硅胶垫可根据与患者身体的接触角度进行翻转,从而增大与患者的接触面积,降低单位面积压力。
13.作为优选,压力传感器可实时监测硅胶垫对患者身体的支撑力,电机转动后可通过螺纹副驱动顶杆的上下移动,从而可调节对应硅胶垫对患者的支撑力。
14.作为优选,手术床上各个支撑区域构成相对独立的支撑系统,同一个支撑区域内为患者提供支撑的顶杆可通过上下移动使各个顶杆的支撑力接近相同,避免局部压力过大的情况出现。
15.作为优选,当上位机检测到患者保持同一个体位的时间超过一个小时后,各个支撑区域中的支撑阵列会对患者进行主动压力缓解。
16.本发明的有益效果:
①
头部固定机构可根据体位需要移动至合适位置,从而满足对患者头部固定的需要;
②
上位机可通过压力传感器检测支撑区域中各个支撑单元的支撑力大小,经过上位机计算后,各个支撑单元中的电机相应转动,使各个支撑单元中的顶杆进行相应的升降动作,以使支撑区域内为患者提供支撑的顶杆可提供相对均匀的支撑力,从而避免局部压力过大的情况出现;
③
当上位机检测到患者保持同一个体位的时间超过一个小时后,各个支撑区域中的支撑阵列会对患者进行主动压力缓解;
④
摆动板、十字轴、顶帽构成具有两个转动自由度的虎克铰结构,从而摆动板上侧的硅胶垫可根据与患者身体的接触角度进行翻转,增大与患者的接触面积,降低单位面积压力。
附图说明
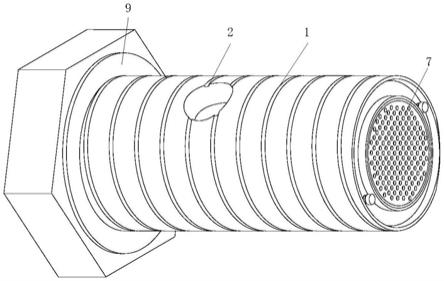
17.图1为本发明的整体结构示意图。
18.图2为左侧位时的整体结构示意图。
19.图3头部固定机构的剖面结构示意图。
20.图4为支撑单元的剖面结构示意图。
21.图5为支撑阵列依据患者体型曲面进行贴合支撑的原理示意图。
22.附图标号:1床架、1.1横板架、1.2第一连接耳、1.3第二连接耳、2横移支撑台、2.1第四绑带、2.2第五绑带、3第四电缸、4第二电缸、5右臂支撑台、5.1第三绑带、6第一电缸、7第三电缸、8手轮、8.1双牙丝杆、9右夹板、10左夹板、11头枕、12第一绑带、13左臂支撑台、
13.1第二绑带、14硅胶垫、15右身支撑台、15.1右半圆台、15.2第四连接耳、16滑台、16.1左滑槽、16.2右滑槽、17左身支撑台、17.1左半圆台、17.2第三连接耳、18锁止杆、19摆动板、20顶帽、20.1长孔、21方体、22螺杆电机、23顶杆、23.1限位轴、23.2螺纹杆、24压力传感器、24.1信号线、25十字轴、26弹簧。
具体实施方式
23.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
24.如图1、图2所示,所述的床架1通过四个支腿稳定支撑于地面,四个支腿之间横向设置有横板架1.1,横板架1.1上侧设有两个第一连接耳1.2和两个第二连接耳1.3,床架1前端设有横梁,横梁上并列设有两个圆孔,两个圆孔关于床架1纵向中心面成左右对称关系,床架1后端上侧设有横移平台,横移平台前端竖向设有支撑板,支撑板上横向设有的两个圆孔与横梁上设置的两个圆孔分别同轴对应。
25.所述的右身支撑台15前端和后端各设有一个转轴,两个转轴轴线重合,右身支撑台15前端的转轴与横梁上左侧的圆孔转动连接,右身支撑台15后端的转轴与支撑板上左侧的圆孔转动连接,从而右身支撑台15与床架1构成转动副,右身支撑台15下侧纵向设有两个第四连接耳15.2,所述的第一电缸6内部集成有编码器,可精确控制第一电缸6的伸长量,第一电缸6下端与横板架1.1上前侧的第一连接耳1.2转动连接,第一电缸6上端与右身支撑台15前侧的第四连接耳15.2转动连接,所述的第二电缸4内部集成有编码器,可精确控制第二电缸4的伸长量,第二电缸4下端与横板架1.1上后侧的第一连接耳1.2转动连接,第二电缸4上端与右身支撑台15后侧的第四连接耳15.2转动连接,从而第一电缸6和第二电缸4共同驱动右身支撑台15的翻转,并可实现右身支撑台15的定位;右身支撑台15左侧设有右半圆台15.1,所述的右臂支撑台5前端与右半圆台15.1转动连接;右身支撑台15上侧面等间距设有台阶方形孔阵列,每个台阶方形孔中的上侧方孔的尺寸大于下侧方孔的尺寸;右臂支撑台5上侧面等间距设有台阶方形孔阵列,该台阶方形孔与右身支撑台15上的台阶方形孔尺寸相同;右臂支撑台5上设有第三绑带5.1,用于绑缚患者右臂,实现患者右臂的固定,第三绑带5.1可调节松紧,并可通过一个插口结构实现快速连接和打开。
26.所述的左身支撑台17前端和后端各设有一个转轴,两个转轴轴线重合,左身支撑台17前端的转轴与横梁上右侧的圆孔转动连接,左身支撑台17后端的转轴与支撑板上右侧的圆孔转动连接,从而左身支撑台17与床架1构成转动副,左身支撑台17下侧纵向设有两个第三连接耳17.2,所述的第三电缸7内部集成有编码器,可精确控制第三电缸7的伸长量,第三电缸7下端与横板架1.1上前侧的第二连接耳1.3转动连接,第三电缸7上端与左身支撑台17前侧的第三连接耳17.2转动连接,所述的第四电缸3内部集成有编码器,可精确控制第四电缸3的伸长量,第四电缸3下端与横板架1.1上后侧的第二连接耳1.3转动连接,第四电缸3上端与左身支撑台17后侧的第三连接耳17.2转动连接,从而第三电缸7和第四电缸3共同驱动左身支撑台17的翻转,并可实现左身支撑台17的定位;左身支撑台17右侧设有左半圆台17.1,所述的左臂支撑台13前端与左半圆台17.1转动连接;左身支撑台17上侧面等间距设有台阶方形孔阵列,该台阶方形孔与右身支撑台15上的台阶方形孔尺寸相同;左臂支撑台13上侧面等间距设有台阶方形孔阵列,该台阶方形孔与右身支撑台15上的台阶方形孔尺寸
相同;左臂支撑台13上设有第二绑带13.1,用于绑缚患者左臂,实现患者左臂的固定,第二绑带13.1可调节松紧,并可通过一个插口结构实现快速连接和打开。
27.所述的第一绑带12左端与右身支撑台15左侧连接,第一绑带12右端与左身支撑台17右侧连接,第一绑带12用于绑缚患者胸部,实现患者上半身的固定,第一绑带12可调节松紧,并可通过一个插口结构实现快速连接和打开。
28.所述床架1后端上侧的横移平台上固定安装有四个滑块,所述的横移支撑台2下侧横向设置有两个导轨和一个齿条,两个导轨分别与横移平台上四个滑块的配合安装,使横移支撑台2可在床架1上侧横向移动,横移电机内部集成有刹车和编码器,可实现输出轴的精确转动和锁止,通过螺钉朝上紧固安装于横移平台下侧,横移电机上端的输出轴上同轴紧固安装有一个齿轮,该齿轮与横移支撑台2下侧的齿条啮合构成齿轮齿条传动,从而横移电机可驱动横移支撑台2的横向移动和定位;横移支撑台2上侧面等间距设有台阶方形孔阵列,该台阶方形孔与右身支撑台15上的台阶方形孔尺寸相同;横移支撑台2上设置有第四绑带2.1和第五绑带2.2,其中第四绑带2.1可用于绑缚患者大腿位置,实现患者下半身的固定,第四绑带2.1可调节松紧,并可通过插口结构实现快速连接和打开;第五绑带2.2可用于绑缚患者小腿位置,实现患者小腿的固定,第五绑带2.2可调节松紧,并可通过插口结构实现快速连接和打开。
29.所述床架1前端横梁的前侧横向固定设置有两个导轨,所述的滑台16后侧设有四个滑块,四个滑块与横梁前侧的两个导轨配合安装,使滑台16与床架1构成移动副,滑台16下侧设有螺纹孔,所述的锁止杆18上端设有横杆,下端为螺纹杆结构,锁止杆18下端的螺纹杆与滑台16下侧的螺纹孔配合构成螺纹副,顺时针旋转锁止杆18上端的横杆,可使锁止杆18下端压紧床架1前端的横梁,实现滑台16的位置锁定,逆时针横杆可使锁止杆18下端脱离与床架1前端横梁的接触,从而解除滑台16的位置锁定;滑台16上侧中间位置固定安装有头枕11,头枕11为u形结构,患者仰卧时可支撑患者后脑位置,患者侧卧时可避开对患者耳朵的挤压,头枕11外侧包覆有软质硅胶表面,使患者具有较好的使用体验。
30.如图3所示,所述的滑台16左右两侧设有左滑槽16.1和右滑槽16.2,滑台16前端内部横向设置有圆孔,所述的左夹板10右侧为弧面结构,弧面结构内侧包覆有软质硅胶材质,且弧面结构分为两个弯板,两个弯板之间设有的空位对应于患者的左耳,防止左夹板10挤压患者左耳,前端的弯板尺寸较大可实现对患者头部的夹持,后端弯板尺寸较小可对应夹持患者面部,左夹板10下端左侧设有滑块结构,滑块结构内部设有左旋内螺纹孔,左夹板10下端的滑块结构安装于左滑槽16.1中并构成移动副,左夹板10下端右侧设置有盖板,盖板可覆盖于左滑槽16.1上端,不仅具有美观的效果,还能防止血污流入左滑槽16.1中;所述的右夹板9左侧为弧面结构,弧面结构内侧包覆有软质硅胶材质,且弧面结构分为两个弯板,两个弯板之间设有的空位对应于患者的右耳,防止右夹板9挤压患者右耳,前端的弯板尺寸较大可实现对患者头部的夹持,后端弯板尺寸较小可对应夹持患者面部,右夹板9下端右侧设有滑块结构,滑块结构内部设有右旋内螺纹孔,右夹板9下端的滑块结构安装于右滑槽16.2中并构成移动副,右夹板9下端左侧设置有盖板,盖板可覆盖于右滑槽16.2上端,不仅具有美观的效果,还能防止血污流入右滑槽16.2中。
31.所述的手轮8两端均设置有手轮结构,两个手轮结构之间设置有双牙丝杆8.1,双牙丝杆8.1左端设置有左旋螺纹,双牙丝杆8.1右端设置有右旋螺纹,双牙丝杆8.1转动安装
于滑台16前端横向设置的圆孔内,并且双牙丝杆8.1左端的左旋螺纹与左夹板10下端的左旋内螺纹孔配合构成螺纹副,双牙丝杆8.1右端的右旋螺纹与右夹板9下端的右旋内螺纹孔配合构成螺纹副,从而逆时针转动手轮8可使左夹板10和右夹板9同时向中间位置移动,实现对患者头部的夹持固定,顺时针转动手轮8可使左夹板10和右夹板9同时向两侧移动,进而松开对患者头部的夹持固定。
32.如图4、图5所示,所述的支撑单元包括硅胶垫14、摆动板19、顶帽20、方体21、电机22、顶杆23、压力传感器24、十字轴25、弹簧26,其中方体21外侧为方形结构,方形结构的尺寸与右身支撑台15内台阶方形孔中的下侧方孔的尺寸相同,方体21上端设有方形凸台,且方形凸台的尺寸与右身支撑台15内台阶方形孔中的上侧方孔的尺寸相同,方体21内部设有阶梯方形孔,所述的电机22为空心轴电机,其内部集成有编码器,可精确控制输出轴的转动角度吗,电机22固定安装于方体21内部下端,电机22的空心输出轴内设有内螺纹,所述的顶杆23上端为方形杆,下端为螺纹杆,顶杆23安装于方体21内部,且顶杆23上端的方形杆与方体21内部上端的方孔配合安装并构成移动副,顶杆23下端的螺纹杆与电机22的空心输出轴的内螺纹配合构成螺纹副;顶杆23顶端设有传感器安装槽,在靠近顶杆23上端位置横向设有两个同轴的限位轴23.1,顶杆23内部设有竖向贯通的细圆孔,所述的压力传感器24安装于顶杆23顶端的传感器安装槽中,且压力传感器24的信号线24.1可从顶杆23内部的细圆孔穿出后接入上位机控制系统中。
33.所述的顶帽20内部设有开口向下的空腔,空腔上端设有传感器安装槽,顶帽20下端两侧设有同轴的两个长孔20.1,顶帽20安装于顶杆23上端,且顶帽20内的传感器安装槽安装于压力传感器24顶端,两个限位轴23.1对应安装于两个长孔20.1中,顶帽20上侧中间位置向上设有一个弹簧限位轴,顶帽20上端横向设置有圆孔,所述的十字轴25中两个轴线成90
°
夹角,十字轴25中心位置设有圆孔,十字轴25中的一个轴与顶帽20上端的圆孔转动连接,所述的摆动板19下端设有的圆孔与十字轴25中的另一个轴转动连接,从而摆动板19、十字轴25、顶帽20构成具有两个转动自由度的虎克铰结构,摆动板19下侧中间位置向下设有一个弹簧限位轴,所述的弹簧26上端安装于摆动板19下侧的弹簧限位轴上,弹簧26下端穿过十字轴25中心的圆孔后安装于顶帽20上侧的弹簧限位轴上,从而在自然状态下,弹簧26可始终使摆动板19保持水平状态,所述的硅胶垫14上侧面为球面结构,可对患者身体提供柔软舒适的支撑,硅胶垫14下侧面为平面结构,摆动板19上侧面固定安装有四个硅胶垫14。
34.如图1所示,所述右身支撑台15中的每个台阶方形孔中均安装有一个支撑单元,且方体21外侧的方形结构与台阶方形孔中的下侧方孔配合安装,实现支撑单元的纵向和横向定位,方体21上端的方形凸台压紧到台阶方形孔的上侧方孔中,从而实现支撑单元的竖向定位,右身支撑台15中的支撑单元阵列构成右身支撑区域;右臂支撑台5中的每个台阶方形孔中均安装有一个支撑单元,构成右臂支撑区域;左身支撑台17中的每个台阶方形孔中均安装有一个支撑单元,构成左身支撑区域;左臂支撑台13中的每个台阶方形孔中均安装有一个支撑单元,构成左臂支撑区域;横移支撑台2中的每个台阶方形孔中均安装有一个支撑单元,构成横移支撑区域。
35.实施例一:左身支撑台17、右身支撑台15的翻转动作和横移支撑台2的横移动作均可根据手术需要由上位机进行控制,各个支撑区域中的支撑单元阵列可由上位机进行智能调节。
36.实施例二:所述的压力传感器24可实时监测患者对硅胶垫14的压力,也即是硅胶垫14对患者身体的支撑力,电机22转动后可通过螺纹副驱动顶杆23的上下移动,从而可调节对应硅胶垫14对患者的支撑力。
37.实施例三:所述的摆动板19、十字轴25、顶帽20构成具有两个转动自由度的虎克铰结构,从而摆动板19上侧的硅胶垫可根据与患者身体的接触角度进行翻转,增大与患者的接触面积,降低单位面积压力。
38.实施例四:各个支撑区域构成相对独立的支撑系统,并可为患者提供均压力支撑:上位机可通过压力传感器24检测支撑区域中各个支撑单元的支撑力大小,经过上位机计算后,各个支撑单元中的电机22相应转动,使各个支撑单元中的顶杆23进行相应的升降动作,以使支撑区域内为患者提供支撑的顶杆23可提供相对均匀的支撑力,从而避免局部压力过大的情况出现。
39.实施例五:当上位机检测到患者保持同一个体位的时间超过一个小时后,各个支撑区域中的支撑阵列会对患者进行主动压力缓解:以横移支撑区域为例,横向第一行支撑单元中的顶杆23向下移动一定距离,使第一行中的硅胶垫14脱离对患者的支撑,该状态持续一分钟后,第一行支撑单元中的顶杆23上升至原位并继续为患者提供支撑,之后横向第二行支撑单元中的顶杆向下移动一定距离,使第二行中的硅胶垫脱离对患者的支撑,该状态持续一分钟后,第二行支撑单元中的顶杆上升至原位并继续为患者提供支撑,之后横向第三行直至最后一行支撑单元均按照上述运动规律对患者进行主动压力缓解;当横向的支撑单元阵列按照上述运动规律完成压力缓解动作后,纵向第一列直至最后一列的支撑单元阵列继续按照上述运动规律对患者进行主动压力缓解,当纵向支撑单元阵列的压力缓解动作完成后,再执行横向支撑单元阵列的压力缓解,如此循环直至手术完成;各个支撑区域中的主动压力缓解原理相同,并可同时进行。
40.实施例六:当患者需要采取仰卧或俯卧体位时,左身支撑区域、右身支撑区域、左臂支撑区域、右臂支撑区域、横移支撑区域构成一个平面,将滑台16移动至床架1纵向中间位置并保持活动状态,患者可仰卧或俯卧于手术床上,将头部放置于头枕11上,微调滑台16位置后转动锁止杆18锁定滑台16的位置,将各个绑带调节至合适长度后将患者绑缚固定,转动手轮8使右夹板9和左夹板10固定患者头部,各支撑区域内的支撑阵列可为患者提供均压力支撑和主动压力缓解。
41.实施例七:当患者需要采取侧卧体位时,以左侧位为例:医务人员将左臂支撑台13向前转动90
°
,将滑台16向右移动至横梁右端并保持活动状态,上位机控制第一电缸6和第二电缸4伸长,使右身支撑台15向上翻转90
°
,横移电机通电使横移支撑台2向右移动,之后患者侧卧于手术床上,将头部放置于头枕11上,微调滑台16位置后转动锁止杆18锁定滑台16的位置,并将左臂放置于左臂支撑台13的左臂支撑区域上,将各个绑带调节至合适长度后将患者绑缚固定,转动手轮8使右夹板9和左夹板10固定患者头部,从而左身支撑区域、左臂支撑区域、横移支撑区域可为患者提供均压力支撑和主动压力缓解;当患者需要采取右侧位时,原理与上述左侧位相同。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。