1.本发明涉及一种假体手,其具有底盘和至少一个基础元件,所述基础元件用于将假体手指固定在底盘上。
背景技术:
2.假体手用于上肢的假体供应。在前臂筒或前臂管上布置假体手,用于模仿自然的手的至少一个功能,以便给病人配备扩展的功能性。所述功能性通常是抓握功能。为此,抓握元件能运动地被支承在底盘或基体上,通过驱动装置可以使所述抓握元件运动。除了例如通过由肩运动激活的牵拉装置的机械操纵以外,在现代的假体装置中抓握元件或假体手指由至少一个马达驱动装置驱动地被支承在底盘上。抓握装置或假体手指自身可以铰接地构造,以提供近似于自然的手指的功能性。一个或多个手指关节可以构造在假体手指中,从而在闭合运动或手指朝向手心运动时所述手指关节被屈曲。在大多数情况下,假体手指在其近端端部处绕着摆动轴能移位地被支承在底盘上。
3.用于使假体手指相对于底盘移位或者使所述手指元件相对彼此移位的相应的驱动装置通常位于所述底盘中,所述底盘在其基本形式上类似于自然的手的手掌。假体手指以不同的方式和方法在大多数情况下通过铰链关节被固定在底盘上,所述铰链关节构造在底盘上。一个轴穿过手指或底盘上的两个支承座并且将所述两个支承座锁定在另一个部件上的支承销或支承片中。不仅关于单个假体手指的可装配性而且关于可拆卸性,这种布置是有问题的。此外出现密封以及稳定性的困难。
4.出自现有技术的假体手例如在de 10 2014 005 528 a1、us 2014/107805a1或us 2013/305984 a1中被描述。
技术实现要素:
5.本发明的任务在于,提供一种假体手,其中,可以更简单地装配和更换假体手指。
6.根据本发明,该任务通过具有独立权利要求的特征的假体手来解决。本发明的有利的构型和进一步方案在从属权利要求、说明书以及附图中被公开。
7.设置一种假体手,其具有底盘和至少一个基础元件,所述基础元件用于将假体手指固定在底盘上,在底盘上布置或构造用于基础元件的纵向导向装置,基础元件被支承在所述纵向导向装置中,其中,纵向导向装置锁止两个平移自由度,并且该纵向导向装置配置夹紧元件,所述夹紧元件在锁定位态和解锁位态之间能移位地被支承在底盘或基础元件中或上并且在所述锁定位态中引起第三平移自由度的锁止。纵向导向装置由槽和榫构成,所述槽和榫具有对应的横截面并且布置或构造在不同的部件上,也就是说,槽布置或构造在底盘上,并且榫布置或构造在基础元件上或者反过来。通过将基础元件布置在具有仅仅一个平移自由度和夹紧元件的纵向导向装置中实现将基础元件并且由此也将假体手指快速地并且容易地装配和拆卸,所述夹紧元件在夹紧元件的锁定位态中锁止第三平移自由度,所述假体手指固定在基础元件上,特别是能旋转地被支承在基础元件上。为此仅仅需要操
纵夹紧元件,所述夹紧元件可以作为已经预装配的部分布置在底盘上或者布置在由基础元件和假体手指构成的手指单元上。夹紧元件作用于基础元件并且锁止第三平移自由度或者又释放所述第三平移自由度。由此仅须使夹紧元件从锁定位态运动到解锁位态中或者反过来,以便可以将假体手指从假体手移除或者固定在所述假体手上。另外的构件不必被拆卸,以将基础元件和假体手指装配或拆卸。特别是当夹紧元件能运动地或能移位地固定在底盘或基础元件中时,则所述夹紧元件也可以在拆卸状态中不丢失,夹紧元件由此是基础元件或底盘的组成部分并且在拆卸状态中保留在所述基础元件或底盘上。
8.本发明的一个进一步方案设置,夹紧元件作用于至少一个锁止元件,并且将该锁止元件从解锁位态带到锁定位态中。通过能操纵地可被支承或固定在底盘或基础元件上的夹紧元件作用于锁止元件,所述锁止元件最终阻止基础元件与底盘之间的相对移位。在夹紧元件的位态中、即在解锁位态中,锁止元件也处于解锁位态中,夹紧元件被带到锁定位态中,所述夹紧元件将锁止元件从解锁位态移位到锁定位态中并且将基础元件固定在底盘上的纵向导向装置中。
9.夹紧元件或锁止元件可以将基础元件夹紧在纵向导向装置中,例如其方式是,可构造在底盘或基础元件上的榫在槽内部被压或被夹紧在槽壁上。替换地或补充地,可以进行夹紧元件或锁止元件的形状配合的锁定,从而基础元件被锁定在纵向导向装置中。例如可以在槽壁中或者在榫的一部分上构造凹进部或形状配合元件,夹紧元件或锁止元件在所述锁定位态中与所述凹进部或形状配合元件配合。与形状配合的锁定一起地能够垂直于所述两个始终被锁止的平移自由度中的至少一个平移自由度施加横向力,以便由此除了锁定的形状配合的部分以外还提供夹紧作用。
10.纵向导向装置可以构造为t形导向装置、l形导向装置、圆柱形导向装置或燕尾形导向装置,非常普遍地,具有侧凹的所有几何结构适用于纵向导向装置,所述侧凹锁止两个平移自由度。通过纵向导向装置能实现,基础元件和由此假体手指也能够以相对于底盘以及相对彼此的准确的定向被装配。如果纵向导向装置的部件相对彼此被夹紧,则制造公差可以被选择为相对大的,因为纵向导向装置的结构对于尺寸偏差或几何错位是不敏感的。
11.在本发明的一个进一步方案中设置,底盘盘形地构造,并且纵向导向装置具有下述定向,所述定向正交于盘形的底盘的主面延伸。特别是当多个或所有假体手指以所述方式和方法被支承在底盘上时,则实现使装配变得容易,因为所有基础元件并且由此假体手指也在共同的接合方向上取向。底盘的取向在此基本上相应于自然的手的手掌,装配方向则从手掌朝向手背或者从手背朝向手掌、即沿着背侧方向或者沿着腹侧方向实现。
12.纵向导向装置可以具有末端止挡,从而基础元件的取向和由此假体手指的取向也能够沿着腹侧方向或者沿着背侧方向明确地被确定。由此实现,多个假体手指可以始终以相对彼此准确的取向被固定在底盘上。如果纵向导向装置的槽位于底盘上,则所述槽具有仅仅一个导入开口,槽的另一个端部是闭合的或者设置有锁止装置,从而在完全导入下述榫之后使基础元件处于准确的位态中,所述榫在这个实例中构造或布置在基础元件上。替换地能实现,在所述榫上构造末端止挡、例如横向销或壁,从而所述榫不能继续被推入到槽中,所述槽则也可以贯通地构造。原则上也可能的是,在槽和榫的对置的端部上分别构造或布置末端止挡,从而纵向导向装置从外部闭合或密封。在末端止挡上可以布置密封件,所述密封件防止或者至少阻止污物的进入。
13.本发明的一个进一步方案设置,基础元件具有用于相应的假体手指的支承座。在基础元件上可以布置或构造用于假体手指的支承部位,从而可以实现相对于基础元件摆动并且在将基础元件固定在底盘上之后也实现相对于底盘摆动。基础元件和布置在其上的相应的假体手指由此构成下述模块,所述模块能够共同地固定在底盘上或者可以从底盘被移除。
14.锁止元件可以沿着纵向导向装置的纵向延伸能移位地被支承,由此实现容易的可触及性和容易的可标记性。所述榫沿着纵向导向装置的纵向延伸被推入到纵向导向装置的槽中。沿着相同的方向进行夹紧元件的移位,这则导致将纵向导向装置沿着导入方向和逆着导入方向夹紧或锁止。如果纵向导向装置构造为垂直于底盘的主面取向,则基础元件可以将多个手指元件例如从手心被推入并且以相同的取向使夹紧元件移位。这简化了装配和拆卸,因为可以实现将相应地要拆卸的或要固定的假体手指或基础元件的固定直接地锁定和解锁。
15.夹紧元件可以构造为螺栓或者构造有螺栓或者与螺栓耦合。作为螺栓的构型实现,可以通过简单的、传统的工具操纵夹紧元件。夹紧元件自身也在拆卸状态中被保持在螺纹中,从而所述夹紧元件不可能丢失。仅需通过标准化的工具来操纵一个唯一的标准化的元件,而不需要另外的物体、例如垫圈、销钉、销或夹子。原则上也可能的是,夹紧元件倾斜于或横向于纵向导向装置的纵向延伸被取向,由此可以通过夹紧元件实现直接的形状配合的或夹紧的锁定。如果夹紧元件作用于至少一个锁止元件,则通过构造为螺栓的夹紧元件的移位可以将所述锁止元件带到形状配合的锁定位态或被夹紧的锁定位态中。
16.可以给夹紧元件或锁止元件(只要所述锁止元件存在)配置凹进部,所述夹紧元件或锁止元件在所述锁定位态中与所述凹进部配合。所述配合可以纯形状配合地、例如通过使夹紧元件或锁止元件移位或移动到凹进部中进行;替换地或补充地可以通过夹紧元件或锁止元件将力施加到凹进部中或者施加到凹进部的承载体上,这通过被支持的夹紧和同时的间隙补偿实现。如果锁止元件位于底盘中,则凹进部构造在基础部分中,以及反过来。
17.有利地,凹进部布置在纵向导向装置的槽中或在纵向导向装置的榫上的下述位置中,在所述位置中基础元件在底盘上占有所述基础元件的最终位置。当到达最终位置时,夹紧元件或锁止元件才可以与凹进部配合。在凹进部与对应的夹紧元件或锁止元件的间隙补偿的和自动对中心的构型中能实现,通过将夹紧元件或锁止元件导入和带入到凹进部中而使基础元件在底盘上运动到所述基础元件的最终位置上。这可以通过球状的或圆锥状的或者以另外方式倾斜的构型实现两个连接配合件中的至少一个连接配合件,即例如通过凹进部的圆拱形的构型和夹紧元件或锁止元件球状的构型实现。也在锁止元件的楔形的构型以及矩形的槽作为凹进部的情况中可以实现在纵向延伸上的所述附加的夹紧作用,以使基础元件在底盘上运动到所述基础元件的最终位置中并且被夹紧地保持在最终位置中。凹进部同样可以具有导入斜面。
18.本发明的一个进一步方案设置,锁止元件通过夹紧元件在所述锁定位态或解锁位态中被预加载。
19.通过在所述锁定位态中的预加载确保将基础元件固定在底盘中。替代通过夹紧元件激活地锁定锁止元件,在基础元件或底盘上的夹紧元件能够通过弹簧元件被移位到锁定位态中,夹紧元件为了拆卸而使锁止元件运动到解锁位态中。如果基础元件被装配在底盘
上,则夹紧元件被操纵并且取消对锁止元件的锁止,从而所述锁止元件通过弹簧元件或弹性体元件的回位力被移位到锁定位态中。夹紧元件可以支持在所述锁定位态中的预加载。
20.锁止元件可以在相对于夹紧元件的移位方向的横向方向上能移位地被支承,这例如通过齿轮传动装置、螺纹或者通过移动装置实现。如果例如夹紧元件构造为螺栓,则锁止元件可以设置有斜面或倒圆的接触面,从而在螺栓纵向移位时锁止元件的横向移位在相对于夹紧元件的移位方向的横向方向上进行。通过锁止元件的移位则实现纵向导向装置的形状配合的和/或被夹紧的锁定。
21.锁止元件可以能移动或能移位到凹进部或导向装置中地构造在底盘内部。优选地,锁止元件在基础元件或底盘上的支承设计为,使得在基础元件的拆卸状态中锁止元件不丢失。锁止元件与基础元件或底盘一起构造为模块。
22.锁止元件可以构造为球或圆锥体或者具有至少一个倒圆的区域,该区域压到纵向导向装置的榫或槽壁上。由此产生大的面压力或者在与凹进部配合时实现自动对中心和取向以及自动的间隙补偿。
23.在以往的系统中为了修理而或多或少地必须移除假体手的多个附加的部件,所述多个附加的部件不与要拆卸的手指自身连接,而通过本发明能实现假体手指的容易的装配或拆卸。在夹紧元件和必要时锁止元件在底盘或基础元件中集成的构型中不必再将构件拆卸和存放,确切地说,将基础元件锁定在底盘上所需的所有部件集成在底盘或基础元件中。纵向导向装置的槽可以例如构造或布置在底盘的壁或底盘的边缘上。底盘壁形成用于假体手的电子部件和/或机械部件的接收空间、例如用于马达、蓄能器、控制装置、传感器、机械部件、蓄能器和类似装置的接收空间。空腔例如从实心基体被铣削出或加工出并且在装配机械部件之后被封闭。仅仅还存在用于促动假体手指的贯通部。这实现底盘的简单的结构。相应的结构设置在具有无空腔的边缘的底盘中。
24.夹紧元件在基础元件上布置在孔中和在螺纹中,所述夹紧元件使锁止元件这样移位,以使得锁止原来自由的平移自由度,该平移自由度被需要用于将基础元件导入到底盘上的槽中。同时基础元件在该槽中被夹紧和校准,从而制造公差可以被选择为大的。锁止元件例如构造为球,所述球布置在螺纹孔的中心轴线外部。具有圆锥顶的埋头螺栓可以用作夹紧元件,所述埋头螺栓在螺栓进入到螺纹中时使球状的锁止元件横向于螺栓和纵向导向装置的纵向延伸移位并且压入到槽壁内部的圆拱形的凹进部中。由此为了装配和拆卸仅须操纵一个唯一的螺栓,而不需要另外的构件。原则上纵向导向装置的槽和榫的相反的布置也是可能的,也就是说,在基础元件中的槽以及在底盘中或上的榫的构型是可能的。同样可能的是,夹紧元件在底盘上布置在榫中或者在槽旁边。
25.纵向导向装置实现,具有高的强度和稳定性的基础元件可以被固定在底盘上。通过螺栓或销钉的通常的固定由于受限的结构空间而迅速达到稳定性极限并且通常导致材料失效,而通过纵向导向装置由于大的面和稳定的构型能够容易地承受大的力。尤其当纵向导向装置的导入开口从手掌侧是可能的、即移动沿着背侧方向进行并且一个或多个末端止挡布置或构造在槽和榫上时,则可以非常好地承受通常沿着背侧方向作用的力。沿着近端方向和远端方向作用的拉力和压力通过纵向导向装置的大的面有效地被承受,从而在那里仅仅产生相对小的面压力。
26.在相应地通过纵向导向装置固定在底盘上的多个假体手指的情况中,由假体手指
和基础部分构成的每个手指单元形成一个下述单元,该单元可以彼此无关地被装配和被拆卸。在底盘中由于具有被闭合的槽的纵向导向装置的构型而不需要作为至底盘的贯通部的孔。
附图说明
27.下面借助附图具体阐述本发明的一个实施例。附图示出:
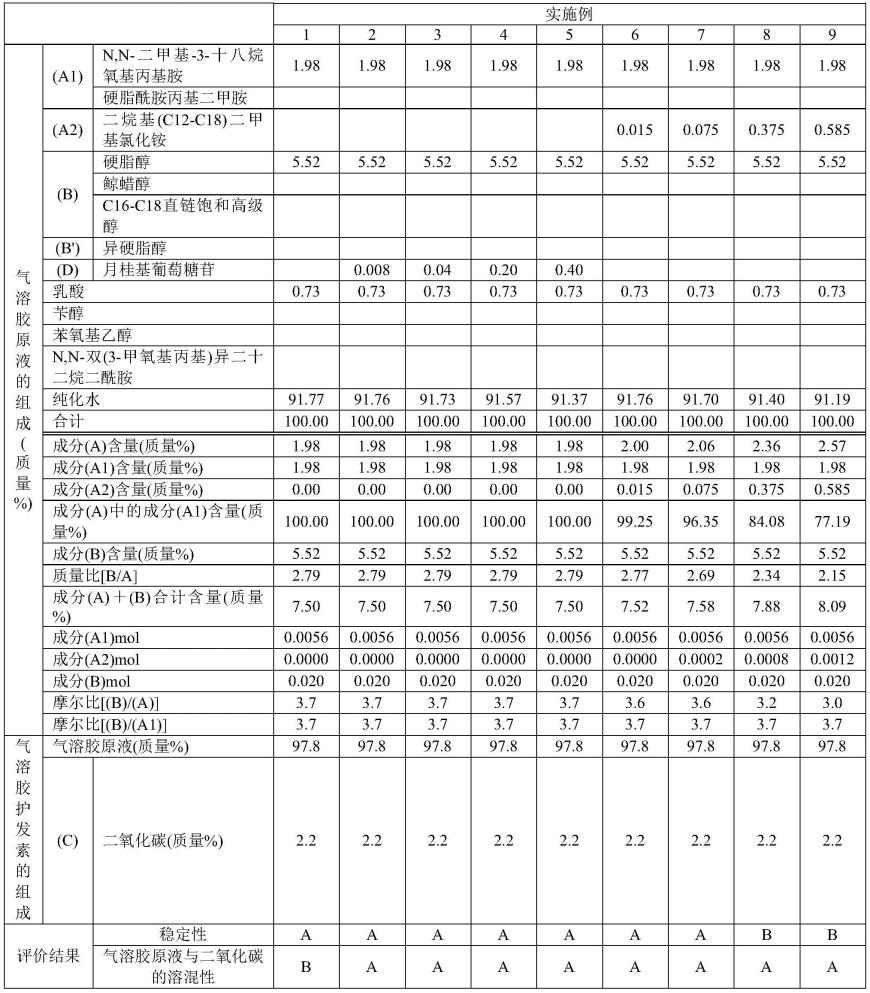
28.图1-具有假体手指和基础元件以及底盘的部分的手指单元的伸展图;
29.图2-被装配的假体手指的多个视图;
30.图3-在锁定状态中的、细节z和根据图2的b-b的两个截面图;
31.图4-根据图3的在松开状态中的截面图;
32.图5-图2的一个变体;
33.图6-图3的具有两个锁止元件的一个变体;以及
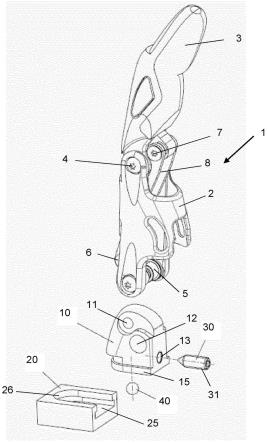
34.图7-假体手的示意图。
具体实施方式
35.在图7中示出假体手的示意图,其中,在相应于自然的手的手掌的底盘20上布置多个假体手指1。假体手指1能更换地被支承在底盘20上。在底盘20内部或在底盘20上可以布置马达、控制装置、传动装置和类似装置,以使假体手指1相对于底盘20移位。底盘20能够固定、特别是可松开地固定在前臂管或前臂筒上。电连接装置可以从底盘20延伸到假体手指1中,机械力传递装置、例如杠杆、推杆、拉杆或线缆、带、皮带或类似装置同样可以从底盘延伸到假体手指中。
36.图1示出由假体手指1及基础元件10构成的手指单元的细节图和底盘20的部分视图。假体手指1具有近端的指节2或远端的指节3,所述近端的指节和远端的指节通过摆动轴4铰接地彼此连接。近端的指节2的近端的端部能够通过摆动轴5固定在基础元件10上。在两个摆动轴4和5之间的连接线的不同侧上布置支承轴6和7,所述支承轴通过杠杆8彼此耦合。远端的指节3上的支承轴7布置在掌侧,近端的指节2上的支承轴6布置在连接线背侧。
37.在基础元件10上构造具有两个孔11,12的支承座,所述两个孔彼此隔开间距地布置。近端的支承孔12用于接收摆动轴5,远端的、布置在背侧的支承孔11用于接收支承轴6。如果例如通过与近端的指节2上的凹进部配合的牵拉装置将近端的指节3绕着支承轴5沿着背侧方向摆动以使手闭合,则这由于两个轴5,6的间距导致支承轴7相对于摆动轴4移位,从而远端的指节3屈曲。在相反的运动中进行远端的指节3的伸展。
38.在基础元件10上还构造作为纵向导向装置的部分的榫15。榫15具有基本上t形的横截面并且构造在基础元件10的近端的端部上。相应成型的板可以作为替换的构型固定在基础元件10的底侧上,以构成所述榫15。榫15构造用于被导入到基盘20的槽25中。槽25的横截面相应于榫15的横截面。在槽25的背侧端部上构造末端止挡26,从而基础元件10只能被推入直至该末端止挡。从上方观察,槽25在背侧端部处倒圆地构造,另外的造型同样是可能的。纵向导向装置的不同的横截面形状同样是可能的。除了燕尾形的导向装置或l形的导向装置以外,所有纵向导向装置可以设置用于锁止底盘20和基础元件10之间的两个平移自由度和有利地所有旋转自由度。
39.在基础元件10内部构造具有内螺纹的孔13,呈埋头螺钉形式的具有外螺纹夹紧元件30能够被旋入到所述孔中。夹紧元件30的顶端圆锥形地构造并且作用于锁止元件40,所述锁止元件被支承在基础元件10中的另外的孔或导向装置内部。该孔可以构造为在基础元件10中的相对于孔13的横向孔。为了防止在所示的实施例中构造为球的锁止元件40脱落,油脂填充或另外的固定装置可以被添加或者布置在基础元件10上。
40.在槽25的底侧上可以构造用于接收锁止元件40的对应的凹进部、例如圆拱形的或圆锥形的凹进部。
41.在所示的实施例中,槽25从底盘20的实心材料被铣削出或加工出。替换地,槽25也可以多件式地构造,其方式是,具有凹进部的相应成型的板布置在基槽上。
42.在图2中示出被装配在底盘20上的假体手指1的三个视图。左视图示出具有底盘20和基础元件10的侧视图,所述基础元件固定在槽中。如果将拉力沿着箭头的方向施加给在近端的指节2内部布置在相应的导向装置中的耦合元件9,则近端的指节2绕着摆动轴5摆动。杠杆8保持固定在支承轴7上并且逆时针地与近端的指节2一起、然而仅仅绕着近端的支承轴6转动。摆动轴4同样如同支承轴7那样同样逆时针方向地摆动,远端的指节3基于在实现能摆动的移位的两个支承轴6,7之间的刚性耦合还绕着摆动轴4摆动。回位可以通过近端的指节2的相反的移位或弹簧进行。驱动装置可以布置在底盘20的背侧上、必要时布置在由底盘壁限界的凹进部中。
43.在图2的中间视图中示出假体手指的背侧视图。仅仅部分地示出底盘20。可以看到,基础元件10被导入底盘20中的槽25内部。基础元件10具有基本上t形的横截面,从而所述基础元件可以被导入对应构造的槽25中。在导入之后,在激活夹紧元件30并且锁止元件40引起锁定之前,基础元件10已经在两个平移自由度上被限制,垂直于导入方向的运动被锁止。在假体手指1的内侧可看到弹簧50,所述弹簧引起远端的指节3相对于近端的指节2沿着伸展方向伸展。如果通过耦合元件9不再施加拉力,则通过弹簧50的回位力引起伸展并且由此引起回位到初始位置中。
44.在图2的右视图中示出根据a-a的截面图。特别是由细节z可知,基础元件10具有在远端突出于底盘20的、用于两个轴5,6的支承座完全被导入槽25中,直至末端止挡26。夹紧元件30被旋入到孔13的螺纹中并且作用于锁止元件40,所述锁止元件在槽25的底部被压到凹进部24中。
45.凹进部24可以圆拱形地或圆锥形地构造,从而在基础元件10的不完全的导入运动中出现在底盘20内部自动的自对中心和自动定向。通过沿着背侧方向旋入夹紧元件30将呈球形式的锁止元件40沿着近端方向压到凹进部24中。
46.由此榫15形状配合地被锁定在槽25内部并且此外实现夹紧在t形的槽的上边缘上。基础元件10和由此假体手指1因此无间隙地和稳定地被支承在底盘20上的槽25内。大的保持力可以通过这种锁定实现,因为存在大的接触面,以承受压力和拉力。通过实心的末端止挡26阻止沿着背侧方向、即朝向手背的方向的移位,从而可以承受沿着背侧方向非常高的压力。沿着掌侧方向的压力通常小得多并且导致假体手指弯曲,这通过用于耦合元件9的长孔导向装置示出。
47.在图3中以左视图示出截面b-b并且以右视图示出细节z。在左视图中可看到,夹紧元件30作用于锁止元件40并且所述锁止元件由于圆锥形的顶端34而朝向基盘20的槽25的
闭合的底面的方向被向下压。不仅夹紧元件30而且基础元件10沿着同一方向移位,从而装配可以非常容易地从手掌内侧或者从掌侧沿着背侧方向进行。
48.在图3的右视图中在截面图中可看到,球状的锁止元件40通过锁止元件30的锥形的顶端34被压到圆锥形的凹进部24中。夹紧元件30设置有外螺纹31,所述外螺纹与孔13的内螺纹配合。即使部分地旋出螺栓或锁止元件30,该锁止元件继续持久地被保留在基础元件10上。锁止元件40可以如同前面实施的那样在油脂支承中通过磁力或者通过在底侧上的保持环或者另外的适用的保持装置被保持在用于接收锁止元件40的向下延伸的孔内部并且被保护以防脱落。
49.在图4中以截面图示出根据细节z的、在未装配的状态中的、具有基础元件10和底盘20的布置。夹紧元件30部分地从基础元件10被旋出,锁止元件40被接收在孔13内部并且不突出于榫15的底侧。基础元件10可以在槽25内部沿着由双箭头示出的导入方向和导出方向运动。未示出的假体手指通过摆动轴5已完成装配在基础元件10上并且可以与所述基础元件一起作为模块被固定在底盘20上。为了固定,基础元件10完全被导入直至末端止挡26。用于锁止元件40的横向孔则基本上对应于凹进部24。然后夹紧元件30被旋入,圆锥体34将锁止元件40向下压入凹进部24中并且导致基础元件10在底盘20内部形状配合的和被夹紧的锁定。为了松开,构造为埋头螺钉的夹紧元件30被旋出,从而锁止元件可以运动到孔13中,由此取消夹紧作用和形状配合的锁定。假体手指1则可以与基础元件10一起必要时在耦合元件9脱耦之后从底盘20被取下。
50.在图5中示出该固定的一个变体,其中,图5相应于图2的右视图。基本结构是相同的,替代与槽25的基部夹紧,锁止元件40布置在平行于槽25的基面的平面中并且由此作用于槽25的侧面。在仅仅一个锁止元件40的情况中,沿着相反的方向挤压榫15。如果存在两个锁止元件,则实现在中间的自动对中心。
51.在图6中示出具有两个锁止元件40的实施方式,左视图相应于图4的左视图,与此相应地右视图相应于图4的右视图。可看到,两个锁止元件40彼此对置地布置在基础元件10内部的横向孔中。横向孔正交于孔13并且正交于夹紧元件30的导入方向延伸。圆锥形的顶端34作用于两个锁止元件40并且将所述两个锁止元件向外到凹进部中或者仅仅压到槽25的侧壁上。
52.替换地可能的是,一个锁止元件被压到槽25的底面或基面中,并且另一个锁止元件40被压到槽25的侧壁上。原则上同样可能的是,设置三个锁止元件40,两个锁止元件与槽的侧面相互作用,一个锁止元件与底面相互作用。
53.原则上同样可能的是,锁止元件和夹紧元件布置在底盘中并且作用于基础元件中的榫。在所述榫中则可以布置凹进部。原则上也可能的是,夹紧元件直接实现夹紧和/或形状配合的锁定。运动学的相反方案同样是可能的,即在基础元件内部的槽以及在底盘内部或上的榫的构型是可能的。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。