1.本实用新型涉及机械手技术领域,具体为具有连续转轴的三自由度并联机构。
背景技术:
2.目前应用广泛的工业机器人多为串联机器人。串联机器人为开环结构,各关节单独驱动,不存在耦合,其具有结构简单,控制方便,工作空间大运动学正解求解容易的优点。迄今为止,对于串联机器人各方面的研究已经十分成熟,并成功应用于装配、加工、码垛等领域。然而,由于串联机构的开环结构形式,各个关节间的变形量与误差均会累加,导致机器人的精度降低;此外,串联机器人的结构使得其整体刚度较低,限制了其在实际应用中的性能。因此,在加工领域精度要求越来越高的今天,传统的串联机器人已经逐渐无法满足需要。为解决这一难题,国内外学者和研究人员近年来以并联机构为基础,探索以并联机器人为主机构的新型多轴加工机床。与六自由度并联机构相比,少自由度并联机构具有低耦合度,易于模块化等优点,越来越受到研究者的重视与青睐,与此同时,一些少自由度并联机构,已经在多轴加工机床中得到了成功的应用。
3.现有的并联机构实用新型公布专利(如cn101066593a、cn106903677a、cn107175654a),机构内部球铰链过多,结构较为复杂,加工装配精度难以保证,制造困难。此外,球铰链球头与球窝间由于动配合的关系不可避免的存在间隙,工艺误差及铰链运动时的摩擦会加剧间隙误差,降低机构的精度。因此,提出一种结构简单,加工性能好的新型三自由度并联机构很有必要。
技术实现要素:
4.针对现有并联机构内部球铰链多,结构复杂的问题,本实用新型提供了具有连续转轴的三自由度并联机构,其可实现空间两转动一移动运动,且不含球铰链,结构简单。
5.其技术方案是这样的:具有连续转轴的三自由度并联机构,其包括固定基座和动平台,所述固定基座通过第一支链、第二支链和第三支链与所述动平台连接,其特征在于:所述第一支链、所述第二支链和所述第三支链分别包括依次连接的移动副、万向副一、连杆,所述第一支链和所述第二支链的连杆通过转动副与所述动平台连接,所述第三支链的连杆通过万向副二与所述动平台连接,所述移动副的轴线和相应支链中的所述万向副一与所述移动副连接的转动轴线平行,所述转动副的转动轴线和相应支链中的所述万向副一与所述连杆连接的转动轴线平行;
6.所述第一支链和所述第二支链中,所述移动副的轴线共轴,所述万向副一与所述移动副连接的转动轴线共轴,所述转动副的转动轴线平行;
7.所述第三支链中,所述万向副一与所述连杆连接的转动轴线和所述万向副二与所述连杆连接的转动轴线平行;
8.所述第一支链与所述第二支链中的所述移动副的轴线和所述第三支链的所述移动副的轴线垂直,所述第一支链、所述第二支链中的所述万向副一与所述移动副连接的转
动轴线和所述第三支链中的所述万向副一与所述移动副连接的转轴轴线相交形成交点,所述万向副二与所述动平台连接的转动轴线经过所述交点。
9.其进一步特征在于:
10.所述万向副二包括转动块,所述转动块与所述连杆转动连接,所述转动块还通过穿过所述动平台的连接轴与所述动平台转动连接;
11.所述移动副为驱动副,所述移动副包括第一移动副、第二移动副和第三移动副;所述万向副一包括第一万向副、第二万向副和第三万向副;所述连杆包括第一连杆、第二连杆和第三连杆;所述转动副包括第一转动副和第二转动副;
12.所述第一支链包括依次连接的所述第一移动副、所述第一万向副、所述第一连杆和所述第一转动副,所述第一移动副与所述固定基座连接,所述第一连杆通过所述第一转动副与所述动平台连接,所述第一移动副与所述第一万向副的第一转轴连接,所述第一连杆与所述第一万向副的第二转轴连接;
13.所述第一移动副包括第一导轨、与所述第一导轨滑动配合的第一滑块;
14.所述第二支链包括依次连接的所述第二移动副、所述第二万向副、所述第二连杆和所述第二转动副,所述第二移动副与所述固定基座连接,所述第二连杆通过所述第二转动副与所述动平台连接,所述第二移动副与所述第二万向副的第三转轴连接,所述第二连杆与所述第二万向副的第四转轴连接;
15.所述第二移动副包括第二导轨、与所述第二导轨滑动配合的第二滑块;
16.所述第三支链包括依次连接的所述第三移动副、所述第三万向副、所述第三连杆和所述万向副二,所述第三移动副与所述固定基座连接,所述第三移动副与所述第三万向副的第五转轴连接,所述第三连杆一端与所述第三万向副的第六转轴连接,所述第三连杆另一端与所述万向副二的第七转轴连接,所述动平台与所述万向副二的第八转轴连接;
17.所述第三移动副包括第三导轨、与所述第三导轨滑动配合的第三滑块;
18.所述第一转轴的转动轴线与所述第一移动副的轴线平行,所述第一转动副的转动轴线与所述第二转轴的转动轴线平行;所述第三转轴的转动轴线与所述第二移动副的轴线平行,所述第二转动副的转动轴线与所述第四转轴的转动轴线平行;所述第一移动副的轴线和所述第二移动副的轴线共轴,所述第一转轴的转动轴线和所述第三转轴的转动轴线共轴,所述第一移动副的轴线、所述第二移动副的轴线与所述第三移动副的轴线垂直;所述第一转动副的转动轴线和所述第二转动副的转动轴线平行;所述第五转轴的转动轴线与所述第三移动副的轴线平行,所述第六转轴的转动轴线与所述第七转轴的转动轴线平行,所述第八转轴的转动轴线经过所述第一转轴的转动轴线、所述第三转轴的转动轴线与所述第五转轴的转动轴线的交点。
19.本实用新型的有益效果为:本实用新型提出的并联机构可实现空间两转动一移动运动,两个转动运动的转轴为连续转轴,具有结构简单,刚度高,动力学性能优异,控制容易等优点。该机构不含球铰链,制造加工容易,精度高。其可与两自由度转动头或是x/y导轨串联组成不同形式的五自由度混联加工机床。
附图说明
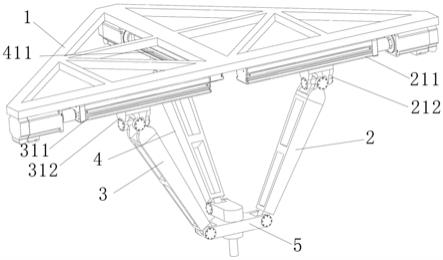
20.图1为本实用新型结构示意图;
21.图2为第一支链结构示意图;
22.图3为第二支链结构示意图;
23.图4为第三支链结构示意图。
具体实施方式
24.如图1所示的具有连续转轴的三自由度并联机构,其包括固定基座1和安装有加工头的动平台5,固定基座1通过第一支链2、第二支链3和第三支链4与动平台5连接,第一支链2与第二支链3结构完全一致且对称分布于第三支链4两侧,具体的,第一支链2、第二支链3和第三支链4分别包括依次连接的移动副、万向副一、连杆,其中,移动副为驱动副,其与固定基座1固定连接,第一支链2和第二支链3的连杆通过转动副与动平台5连接,第三支链4的连杆通过万向副二44与动平台5连接。
25.具体的,结合图2,第一支链2包括依次连接的第一移动副21、第一万向副22、第一连杆23和第一转动副24,该支链称为pur支链,第一移动副21与固定基座1连接,第一移动副21包括第一导轨211、与第一导轨211滑动配合的第一滑块212,第一连杆23通过第一转动副24与动平台5连接(即第一连杆23通过转轴与动平台5转动连接),万向副可以采用十字轴式,第一移动副21与第一万向副22的第一转轴连接,第一转轴的转动轴线为221,第一连杆23与第一万向副22的第二转轴连接,第二转轴的转动轴线为222。
26.类似的,结合图3,第二支链3包括依次连接的第二移动副31、第二万向副32、第二连杆33和第二转动副34,该支链称为pur支链,第二移动副31与固定基座1连接,第二移动副31包括第二导轨311、与第二导轨311滑动配合的第二滑块312,第二连杆33通过第二转动副34与动平台5连接,第二移动副31与第二万向副32的第三转轴连接,第三转轴的转动轴线为321,第二连杆33与第二万向副32的第四转轴连接,第四转轴的转动轴线为322。
27.结合图4,第三支链4包括依次连接的第三移动副41、第三万向副42、第三连杆43和万向副二44,该支链称为puu支链,第三移动副41与固定基座1连接,第三移动副41包括第三导轨411、与第三导轨411滑动配合的第三滑块412,第三移动副41与第三万向副42的第五转轴连接,第五转轴的转动轴线为421,第三连杆43一端与第三万向副42的第六转轴连接,第六转轴的转动轴线为422,第三连杆43另一端与万向副二44的第七转轴连接,第七转轴的转动轴线为441,动平台5与万向副二44的第八转轴连接,第八转轴的转动轴线为442,值得注意的是,图4中,万向副二44不像其它万向副采用了十字轴,而是先让连杆与转动块443通过转轴转动连接,转动块443再依靠垂直并插入动平台5的连接轴444与动平台5转动连接。
28.结合图1
‑
图4,各个部件的位置关系如下,移动副的轴线和相应支链中的万向副一与移动副连接的转动轴线平行,也就是,第一移动副21的轴线(即移动路径)与第一转轴的转动轴线221平行,第二移动副31的轴线与第三转轴的转动轴线321平行,第三移动副41的轴线与第五转轴的转动轴线421平行。
29.转动副的转动轴线和相应支链中的万向副一与连杆连接的转动轴线平行,也就是,第一转动副24的转动轴线与第二转轴的转动轴线222平行,第二转动副34的转动轴线与第四转轴的转动轴线322平行。
30.第一支链2和第二支链3中,移动副的轴线共轴,也就是,第一移动副21的轴线和第二移动副22的轴线共轴;同时,第一支链2和第二支链3中,万向副一与移动副连接的转动轴
线共轴,也就是,第一转轴的转动轴线221和第三转轴的转动轴线321共轴;转动副的转动轴线平行,也就是,第一转动副24的转动轴线和第二转动副34的转动轴线平行。
31.第三支链4中,万向副一与连杆连接的转动轴线(即转动轴线422)与万向副二与连杆连接的转动轴线(即转动轴线441)平行,也就是,第六转轴的转动轴线422与第七转轴的转动轴线441平行。
32.第一支链2和第二支链3中的移动副的轴线与第三支链4的移动副的轴线垂直,也就是,第一移动副21的轴线、第二移动副31的轴线与第三移动副41的轴线垂直;第一支链2和第二支链3中的万向副一和移动副连接的转动轴线与第三支链4中的万向副一和移动副连接的转轴轴线相交形成交点,万向副二44与动平台5连接的转动轴线经过该交点,也就是,第八转轴的转动轴线442经过第一转轴的转动轴线221、第三转轴的转动轴线321与第五转轴的转动轴线421的交点。
33.本实用新型中,三个移动副为驱动副,固定于基座;输入驱动通过伺服电机带动滚珠丝杠驱动滑块移动实现;当移动副运动时,可实现动平台5在空间内的两转动一移动三自由度的运动,同时具有两条连续的转动轴线。采用本方案具有结构简单,刚度高,动力学性能优异,控制容易等优点。该机构不含球铰链,制造加工容易,精度高。其可与两自由度转动头或是x/y导轨串联组成不同形式的五自由度混联加工机床。
34.以上,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉该技术的人在本实用新型所揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。