1.本发明属于检测技术领域,涉及一种适用于膜过滤的荧光高光谱三维在线原位成像分析装置及分析方法。
背景技术:
2.膜技术近年来发展迅速,由于其在筛选和能源效率、简单性和制造可扩展性方面的优势,已广泛应用于各种环境应用,如饮用水/废水处理和海水淡化。然而,所有的膜技术都面临着不可避免的膜污染现象,这会减少产品数量和质量,增加能耗,最终缩短膜寿命。因此了解膜污染机理对于提高膜技术的可持续性至关重要。
3.膜污染的形成和发展是过滤时间的函数,受多种因素的影响,是一个复杂的动态过程。在这一过程中,包括缩孔/堵塞、滤饼层、浓差极化等在内的几种污染行为通常都会涉及到,并且在不同的污染阶段起着不同的作用。除了污染行为的复杂性外,机械和化学动力学的耦合影响也会显著影响污染过程,例如,膜-污染物相互作用和污染物-污染物相互作用在初始或后续污染阶段做出不同的贡献。由于污染物结构和种类的复杂性,对其进行膜污染的表征越显得重要。为了探究膜污染的特性和形成机理,人们应用了许多探测手段,例如采用扫描电子显微镜,共聚焦扫描激光显微镜(clsm),电阻抗谱等等方法探究膜污垢层的形成、膜污染过程中表面形貌以及膜孔隙的变化率等;同时,由于nom和eps等具有多种化学结构的杂质具有特征吸收或发射特征,因此紫外可见光谱、荧光光谱、红外光谱和拉曼光谱等分子光谱方法是识别这些杂质化学结构的理想工具。随着光谱仪器和光谱数据处理的化学计量学方法的飞速发展,光谱方法是表征膜污染最有效的平台工具之一。但这些技术普遍存在观测深度浅、表征过程复杂及无法原位观测等问题,限制了对膜污染机制的进一步研究。
4.随着分子光谱仪器和显微成像技术的发展,将两者结合起来发展而来的显微光谱成像技术越来越引起人们的注意,其既可以识别特定污染物又可以表征膜污染形貌信息正在逐渐成为表征膜污染过程最有效的平台工具,同时由于传统探测方式需要对膜样本进行各种方式的处理以配合其成像平台,因而难以实现原位成像。
技术实现要素:
5.本发明要解决的技术问题在于,针对现有技术的缺陷,提供一种实现了无标记自发荧光区分膜污染物的成分,并快速检测其在膜上/膜内的2/3维空间分布,实现了膜过滤过程中直接可视化和量化污染过程的形成和发展的适用于膜过滤的荧光高光谱三维在线原位成像分析装置。
6.本发明解决其技术问题所采用的技术方案是:
7.一种适用于膜过滤的荧光高光谱三维在线原位成像分析装置,包括通过过滤膜对污水进行膜过滤处理的膜过滤机构、用于对膜过滤机构中的过滤膜进行三维光谱成像且获
得污染物的成分及空间分布信息的高光谱三维成像机构、用于将采集的三维光谱图像进行在线解混及输出彩色污染物分布图像的高光谱三维成像在线分析机构、用于对上述机构进行控制的协同控制机构;
8.所述高光谱三维成像机构包括用于提供激发光源的光束照明光路组件、高光谱成像组件、扫描-反扫描耦合组件;所述扫描-反扫描耦合组件与膜过滤机构中的过滤膜对应设置。
9.进一步地,所述的适用于膜过滤的荧光高光谱三维在线原位成像分析装置中,优选所述膜过滤机构包括依次设置的污水池组件、样品池组件、过滤池组件,三者之间通过管路连接,其中样品池组件中设有过滤膜。
10.进一步地,所述的适用于膜过滤的荧光高光谱三维在线原位成像分析装置中,优选所述污水池组件包括盛装污水的污水池和将污水输送给样品池组件的污水输送件;所述样品池组件包括封闭的中空结构的样品池和带动样品池进行三维运动的三维移动平台,所述样品池内设有过滤膜、用于放置过滤膜的过滤膜放置架,对应过滤膜的样品池上设有与扫描-反扫描耦合组件对应的至少一个透光窗;所述过滤池组件包括盛装滤过水的过滤池、用于对滤液进行称重的称重件。
11.进一步地,所述的适用于膜过滤的荧光高光谱三维在线原位成像分析装置中,优选所述光束照明光路组件包括激光光源、滤波片、反射镜组和用于调整光束大小的扩束系统。
12.进一步地,所述的适用于膜过滤的荧光高光谱三维在线原位成像分析装置中,优选所述高光谱成像组件由成像透镜组和高光谱成像仪组成。
13.进一步地,所述的适用于膜过滤的荧光高光谱三维在线原位成像分析装置中,优选所述扫描-反扫描耦合组件包括分别各自与过滤膜对应设置的扫描振镜和扫描透镜组、反扫描振镜和反扫描透镜组,其中扫描透镜组连接有用于调整反扫描透镜组位置的位移件。
14.进一步地,所述的适用于膜过滤的荧光高光谱三维在线原位成像分析装置中,优选所述高光谱三维成像在线分析机构包括:
15.用于将采集到的高光谱数据对背景去除、光谱去噪以及波段信噪比分析的图像预处理模块;
16.通过端元数目估计、初值估计以及迭代分解对图像预处理模块预处理后的高光谱数据进行分解、在线识别污染物质构成及其三维空间分布的高光谱解混模块;
17.用于进行图像伪彩展示、图像阈值分割以及图像区域计算的多维度图像综合处理模块。
18.进一步地,所述的适用于膜过滤的荧光高光谱三维在线原位成像分析装置中,优选所述协同控制机构包括主控制器、膜过滤机构控制单元、成像控制单元、在线分析控制单元。
19.一种适用于膜过滤的荧光高光谱三维在线原位成像分析方法,包括:
20.s1、通过协同控制机构控制高光谱三维成像机构对样品池组件的过滤膜成像以获取所述过滤膜对应的、包含污染物信息的三维光谱成像;
21.s2、通过所述协同控制机构控制高光三维成像在线分析机构对所述三维光谱成像
进行图像分析以提取所述过滤模对应的污染物成分,并对每一污染物分别生成包含污染物种类和分布信息的彩色污染物分布图像。
22.进一步地,所述的荧光高光谱三维在线原位成像分析方法中,优选所述方法还包括:
23.s3、通过所述协同控制机构监测所述过滤膜的使用状态,并在所述过滤膜的使用过程中,按照预设时间间隔依次获取每一污染物对应的若干所述彩色污染物分布图像并生成所述污染物的变化过程图像。
24.进一步地,所述的荧光高光谱三维在线原位成像分析方法中,优选在所述步骤s2中,所述高光三维成像在线分析机构对所述三维光谱成像进行图像分析以提取所述过滤模对应的污染物成分;包括:
25.s21、对所述三维光谱成像依次进行背景去除、光谱堆去噪、深度学习图像增强和波段信噪比分析,以得到包含各污染物的波长信息的高光谱数据;
26.s22、基于待提取污染物的类别数量对所述高光谱数据进行分解以得到个数为所述类别数量的波长信息;
27.s23、对所述波长信息进行判断,在所述波长信息合法根据所述波长信息分别获取所述污染物的类别信息,在所述波长信息不合法时,修改所述待提取污染物的类别数量,并执行步骤s23。
28.本发明通过膜过滤机构完整显示对污水进行膜过滤处理过程,采用高光谱三维成像机构对膜过滤机构中的过滤膜进行三维光谱成像且获得污染物的成分及空间分布信息,再通过高光谱三维成像在线分析机构将采集的三维光谱图像进行在线解混及输出彩色污染物分布图像,以无标签方式进行原位污染表征。实现了膜过滤过程中直接可视化和量化污染过程的形成和发展。
29.本发明是建立了一个基于扩展光片显微成像并结合高光谱荧光解析技术的无创膜污染成像平台。结合专门设计的膜过滤系统,使用不同的溶液获得了一系列二维或三维高光谱图像,作为过滤时间的函数。采用高光谱光片荧光成像(hs-lsfm)来表征膜过滤过程中的动态污染过程,实现了无标记自发荧光区分膜污染物的成分,并快速检测其在膜上/膜内的2/3维空间分布。通过扫描/反扫描组合完成对膜上/膜内的线扫描照明和成像,即扫描端提供移动的线照明,反扫描端同步移动,将信号光反射至光谱成像仪内,完成对膜的成像。除了能完成对空间分布的探测外,还能完成对不同物质的区分。
附图说明
30.下面将结合附图及实施例对本发明作进一步说明,附图中:
31.图1是本发明实施1的各部分关系框图;
32.图2是本发明实施例1的各部分光路关系示意图;
33.图3是本发明实施例1的膜过滤机构各部分关系框图;
34.图4是本发明实施例1的扫描-反扫描耦合组件与样品池组件位置关系示意图;
35.图5是本发明实施例1的样品池组件外观结构示意图;
36.图6是本发明实施例1的样品池组件去掉盖体后的结构示意图。
具体实施方式
37.为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
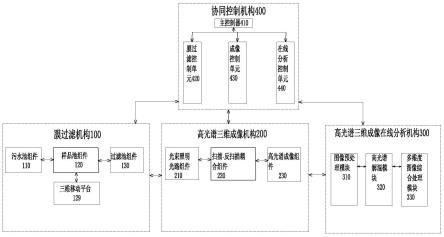
38.实施例1,如图1-6所示,一种适用于膜过滤的荧光高光谱三维在线原位成像分析装置,包括用于对污水进行膜过滤处理的膜过滤机构100、用于对膜过滤机构中的过滤膜进行三维光谱成像且获得污染物的成分及空间分布信息的高光谱三维成像机构200、用于将采集的三维光谱图像进行在线解混及输出彩色污染物分布图像的高光谱三维成像在线分析机构300、用于对上述机构进行控制的协同控制机构400;所述高光谱三维成像机构200包括用于提供激发光源的光束照明光路组件210、高光谱成像组件230、扫描-反扫描耦合组件220;所述扫描-反扫描耦合组件220与膜过滤机构100中的过滤膜500对应设置。
39.本发明主要包括膜过滤机构100、高光谱三维成像机构200、高光谱三维成像在线分析机构300、协同控制机构400这四大部分,各个部分承担各自又相互依存的功能,以下具体对这四大部分进行详细说明:
40.所述膜过滤机构100主要功能是实现连续过滤,包括依次设置的污水池组件110、样品池组件120、过滤池组件130,三者之间通过管路101连接,其中样品池组件120中设有过滤膜500。通过连续的过滤过程,在过滤膜500上逐步累积污染物,通过高光谱三维成像机构200进行在线实时三维光谱成像,再通过高光谱三维成像在线分析机构300进行在线解混及输出彩色污染物分布图像,实现了无标记自发荧光区分膜污染物的成分,并快速检测其在膜上/膜内的2/3维空间分布,实现了膜过滤过程中直接可视化和量化污染过程的形成和发展。
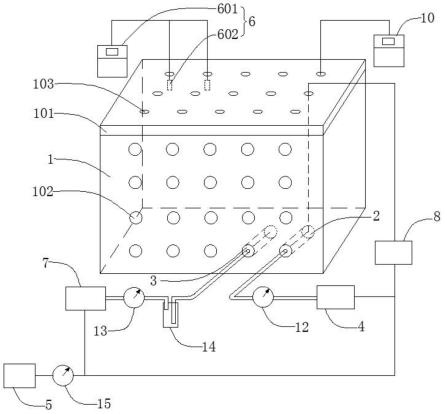
41.其中,如图3所示,污水池组件110包括盛装污水的污水池111和将污水输送给样品池组件120的污水输送件112,污水池中的水为过滤前的污水,通过污水输送件为整个系统提供持续污水,满足实现过滤膜500累积污染物形成膜污染整个的过程,为准确解析膜污染过程形成基础。污水输送件112可以采用多种实施方式,例如:输送泵、气压罐等,本发明优选采用气压罐,气压罐向污水池111加压,将污水通过管路101输送至样品池组件120。污水池111可以采用所有适用本发明对污水和储存的各种结构,本发明不作限定。管路101还设有压力表113和记录仪114,记录仪114可以为无纸记录仪。
42.其中,如图5-6所示,所述样品池组件120包括封闭的中空结构的样品池121和带动样品池121进行三维运动的三维移动平台129。具体地,所述样品池121内设有用于放置过滤膜500的过滤膜放置架122,对应过滤膜500的样品池121上设有与扫描-反扫描耦合组件220对应的至少一个透光窗123。具体地,所述样品池121为封闭结构,包括盖体和池体,二者之间密封连接。所述过滤膜放置架122与样品池121内壁之间密封且过滤膜放置架122将样品池121内腔分割为污水腔和滤后腔,污水腔和滤后腔分别通过管路101分别与污水池组件110和过滤池组件130连接。
43.过滤膜放置架122设置可以水平、竖直或倾斜设置,优选过滤膜放置架122顶面采用倾斜方式设置,使得过滤膜500倾斜以适应扫描-反扫描耦合组件220的光学激发和探测,过滤膜放置架122的水平倾斜角度α可以为90
°
>α>0
°
,优选α为20-60
°
。滤后腔对应的样品池121底部或侧壁上设有出水口124,出水口124收集过滤水,通过管路101供给过滤池组件130;污水腔侧壁或顶部设有进水口125,通过管路101与污水池组件110联通。
44.透光窗在样品池121的污水腔一侧设置两个,分别设置在样品池121的顶面和侧面,也可以将顶面和侧面的透光窗形成一个整体,透光窗123对应倾斜设置的过滤膜500。透光窗123为高透明的石英玻璃材质,为提供扫描-反扫描耦合组件220的光学窗口。
45.三维移动平台129用于调整样品池组件120的位置,设置在样品池组件120的下方,对样品池组件120进行上下、左右、前后三个方向的调节。优选地,三维移动平台129为用于固定样品池121的三轴平台,在x轴、y轴、z轴三个方向上实现分别移动,以带动样品池121移动适应成像。
46.具体地,所述三维移动平台129包括竖直的z轴导轨,配合在z轴导轨上设有相互垂直滑动配合x轴导轨和y轴导轨,从而实现三轴结构移动。其具体结构可以采用现有的三轴平台。
47.管路101是为了输送污水或过滤水,其材料、尺寸等各种参数和结构根据实际需要进行选择,本发明不作限定,只需适用本发明即可。
48.所述过滤池组件130包括过滤池131、用于对滤液进行称重的称重件132。具体地,称重采用分析天平,在分析天平上放置称重池,称重池与过滤池联通,将过滤池中的滤液通入称重池中,进行称重,称重的目的是是为了获取实时膜通量数据,监测过滤膜的使用状态。
49.如图1-2所示,高光谱三维成像机构200是利用光片-高光谱荧光成像原理,对样品池组件120的过滤膜500进行快速三维光谱成像,获得污染物的成分以及空间分布信息。其中所述光束照明光路组件210用于提供激发光源,如图2所示,其包括激光光源211、滤波片212、反射镜组213和用于调整光束大小的扩束系统214。其中,其中激光光源211产生照明激发光,滤波片212过滤非激发波段光,反射镜组213用于调整激光位置,扩束系统214用于调整光束大小。激光光源211可以采用与本发明相适应的激光光源,在此不作限定。其他结构中,滤波片212、反射镜组213和光束系统214为光学结构,具体可以采用现有结构的产品。反射镜组213中反射镜的数量根据实际需要设定,本发明不作限定。
50.如图2所示,扫描-反扫描耦合组件220是用于协调光束照明光路组件210、高光谱成像组件230,共同完成高光谱三维成像,经过复杂的协同控制,扫描-反扫描耦合组件220能够完成精确至微米级别的线扫描成像。扫描-反扫描耦合组件220包括两部分,第一部分为对应过滤膜500设置的扫描振镜221和扫描透镜组222,第一部分的作用是:扫描透镜组222将光束进一步整形成为合格的扫描光束形成光束照明,扫描振镜221将照明光跟随振镜内的反射镜角度变化而变化控制该光束对过滤膜500完成平面线扫描;第二部分为也对应过滤膜500设置的反扫描振镜223和反扫描透镜组224,反扫描透镜组224连接有用于调整扫反描透镜组224位置的位移件(图中未示出),第二部分的作用是:反扫描透镜组224将在过滤膜500的污染物样本上被激发的一列荧光成像至反扫描振镜223上,通过位移件带动反扫描振镜223和反扫描透镜组224与扫描振镜221同步运动,将不同空间位置的线扫描图像反射至高光谱成像组件230中的狭缝2321中。位移件具体可以采用一维调整平台,例如:直线移动轨道、气缸直线移动等,只需实现反扫描振镜223和反扫描透镜组224直线运动,本发明不作限定。
51.如图4所示,其中第一部分的扫描振镜221和扫描透镜组222从样品池121的透光窗123对应过滤膜500,第二部分的反扫描振镜223和反扫描透镜组223在另一方向上也从样品
池121的透光窗123对应过滤膜500,第一部分和第二部分的扫描方向相对过滤膜500呈90
°
夹角。
52.扫描振镜221中的振镜、以及扫描透镜组222中的透镜,它们的数量、尺寸、位置以及结构可以根据实际需要采用现有技术,本发明不作限定。
53.同样,反扫描振镜223和反扫描透镜组224,反扫描振镜223中的振镜、以及反扫描透镜组224中的透镜,它们的数量、尺寸、位置以及结构可以根据实际需要采用现有技术,本发明不作限定。
54.如图2所示,在反扫描振镜223和反扫描透镜组224后方设有高光谱成像组件230,所述高光谱成像组件230由成像透镜组231和高光谱成像仪232组成。
55.高光谱成像组件230中,成像透镜组231包括由扫描透镜、套筒透镜组成,扫描透镜和套筒透镜形成4f成像系统,将扫描-反扫描耦合组件220完成的反扫描成像光束汇集至高光谱成像仪232中。高光谱成像仪由狭缝2321、光栅2322、透镜2323和ccd相机2324组成。狭缝2321将像面上的一列滤出,确保线扫描形成的光谱分辨率。光栅2322对这一列空间荧光进行光栅分光,该列光强按光谱分布于之后的空间,经由成像透镜组2323投射于ccd相机2324中,形成该列空间影响对应的光谱分布面。ccd相机2324对该光谱分布面进行采集,获得光谱空间信息。
56.如图1所示,所述高光谱三维成像在线分析机构300包括图像预处理模块310、高光谱解混模块320以及多维度图像综合处理模块330。高光谱三维成像在线分析机构300将采集得到的三维光谱图像进行在线解混以及可视化操作,输出直观明了的彩色污染物分布图像。高光谱三维成像在线分析机构300是基于mablab app编写的封装程序,可以在线实时完成对采集的高光谱三维膜污染图像的处理。
57.图像预处理模块310用于将采集到的高光谱数据进行背景去除、光谱去噪以、深度学习图像增强、波段信噪比分析。
58.其中,背景去除是图像预处理模块310读入采集的高光谱三维膜污染原始数据堆栈后,通过计算图像峰值信噪比pssn对数据进行识别并根据pssn数值分布区间分类为背景数据和信号数据。筛查出背景数据后,将信号数据减除该背景数据背景后,得到不含背景数据的纯净信号数据;
59.光谱去噪采用两种去噪算法进行光谱堆栈去噪:主成分分析(pca)以及最小噪声分离(mnf),去噪提升信噪比,优选pca法去噪。其中主成分分析方法通过计算数据堆栈的协方差矩阵并求解特征矩阵将原始数据分解至特征空间,再剔除与主信号无关维度完成主要数据的提取和降噪。最小噪声分离方法与主成分分析法类似,但采用信噪比排布协方差矩阵的特征矩阵进而分离噪声。在本专利应用场景下,主成分分析算法更符合膜过滤污染数据;
60.深度学习信号增强采用u-net卷积深度学习架构,通过提前采集本系统高/中/低信噪比图像训练深度学习网络得到具备本系统数据信噪比提升的u-net神经网络。本卷积神经网络主要结构可分为下采样卷积部分、上采样卷积部分和跳跃连接部分。训练数据输入后经过下采样卷积核压缩提取特征,再经过上采样恢复图像尺寸,并通过跳跃连接层保持恢复正确性得到输出数据。输出数据与参考数据对比得到偏差值并进行反向传播矫正网络各层参数,反复训练得到稳定的网络。上述数据在经过预处理后输入经过大量数据训练
后的神经网络可以大幅提升信噪比。
61.波段信噪比分析采用方差法计算三维数据各个通道(第三维度)信噪比:
[0062][0063]
计算出各波长通道信噪比后,筛选出信噪比最低的波段进行数据删除,该操作可以提升后续高光谱分解正确率。
[0064]
高光谱解混模块320是本发明的核心功能模块,它将高光谱三维成像机构200采集到的复杂的高光谱数据进行详细的分解,通过数学算法将混杂的光谱分解成独立的成分,还原膜污染过程中的物质构成,并提供各物质构成的空间分布。具体地,通过三个部分实现:端元数目估计、初值估计以及迭代分解。
[0065]
其中,在端元数目估计过程中,可以使用观测数据与噪声的投影误差之和最小化的hysime算法对数据光谱端元数目进行初步估计,即确定污染物种类数目,用户也可以手动输入端元数目值。该过程的目的在得到一个预估的污染物的种类数据,以便基于该预估数量进行高光谱分解以得到对应数量的波长信息。
[0066]
在初值估计过程中,为了提升光谱分解准确度和速度,初值估计部分使用顶点成分分析(vca)或ppi算法进行初步端元分解,为之后的正式分解提供初始值。可以理解,该初值估计的过程即为得到一个更加接近真实情况的污染物的种类数量的过程。
[0067]
其中,在vca算法流程中,依次进行以下过程:输入预处理后的高光谱图像矩阵v∈rn×m和端元数目r;生成零均值的随机高斯向量w,初始化端元0矩阵w;将像元投影在超平面r
t
u=1获得单型体sp;将单形体中像元正交投影的端点对应的像元i作为提取的第一个端元;for n=1:(r-1)将像元点投影到第一个端元构成的子空间正交方向;将投影端点对应的像元作为i 1个端元。依据该过程进行端元数量的确认。得到的端元数量即为污染物的种类数量。
[0068]
在ppi算法流程中,依次执行以下过程:输入预处理后的高光谱图像矩阵v∈rn×m和端元数目r;使用mnf进行数据降维与噪声白化;随机生成m个随机矢量(默认值10000);初始化记录ppi的m维0矩阵q=q1,q2,
…
,qm;for i=1:m对像元进行投影,记录投影端点(极值)对应的像元序号p
min
、p
max
;查找并更新对应序号像元的ppi,将像素光谱按ppi计数降序排列,并将有序集中的前r个像素光谱作为端元。得到端元数量即为污染物的种类数量。
[0069]
迭代部分分为几何快速分解和同步精确分解:其中几何快速分解占用内存小、速度快,适合原位在线监测过程使用,具体使用最小体积约束顶点成分分析(mvsa)算法进行光谱分解,并配置全约束最小二乘(fcls)算法进行丰度反演。其具体分解过程中,依次进行以下步骤:输入预处理后的高光谱图像矩阵v∈rn×m和端元数目r;使用bm3d进行数据去噪;奇异值分解求解v特征向量矩阵并进行降维;对像元进行投影,记录投影端点(极值)对应的像元序号;对投影进行mm优化-二次规划求解:对端元光谱进行fcls丰度反演,输出端元矩阵和丰度图像,显示精度评价指标;计算sad和均方根误差。
[0070]
而同步精确分解模块精确度高,采用非负矩阵分解以及最小体积约束非负矩阵分解,能够同步分解得到分解光谱和丰度矩阵。本发明通过高光谱分解部分可以将膜污染过程中的物质进行在线识别以及三维空间分布再现。其具体分解过程中依次执行以下步骤:输入预处理后的高光谱图像矩阵,端元数目r,最大迭代次数t,收敛误差ζ;初始化随机端元矩阵w和丰度矩阵h,i=0;在||f
(t-1)-f
t
||<ζ,i≦t时,根据下式交替更新w和h;
[0071]w←
w.*(vh
t
)./(whh
t
);h
←
h.*(w
t
v)./(w
t
wh)(非负矩阵分解)
[0072][0073]
(最小体积约束非负矩阵分解)
[0074]
计算sad和均方根误差,重组获得丰度图像;输出端元矩阵和丰度图像,显示精度评价指标。
[0075]
多维度综合图像处理模块330提供对数据进一步的展示和分析,包括图像伪彩展示、图像阈值分割以及图像区域计算。图像伪彩展示将高光谱分解得到的分解光谱及丰度矩阵进行进一步展示:分解光谱将直接以曲线的形式在坐标轴中展示,以便用户直观的判断当前膜污染的主要污染物成分;不同物质对应的丰度矩阵将被赋予不同的颜色(伪彩)展示以彩色rgb格式展示,以便用户直观的观察污染物的空间分布。图像阈值分割为进一步膜污染分析做更细致的数据处理,其内置多种阈值分割算法,使用triangle阈值分割算法定位原始膜面,后续膜污染图像通过imagej配准插件完成于初始膜面位置的配准。完成定位后利用triangle阈值分割算法对膜污染数据进行阈值分割,并根据初始膜面位置确定有效膜污染区域。图像区域计算利用阈值分割产生的定位点,对图像进行二值化操作并统计得到定量数据信息。
[0076]
如图1所示,协同控制机构400包括膜过滤控制单元420、成像控制单元430、在线分析控制单元440、用于接收上述控制单元信号并发出控制指令的主控制器410。
[0077]
膜过滤控制单元410包括供气控制器、压力控制阀、压力变送表或压力表、记录仪、称重控制器、三维移动控制器,该控制单元设置在膜过滤机构中,其中,供气控制器设置在气压罐上,用于对气压罐进行控制,如开启、关闭等。压力控制阀是设置在膜过滤机构100的管路101中,用于调整管路101压力和流量,压力变送表采集管路101压力或流量信息,记录仪用于记录压力或流量信息,称重控制器控制对过滤后的滤液进行称重,具体地,过滤池后端连接称重池,称重池置于称重件上,称重件通过称重控制器(rs232串口)与主控制器连接,每隔一定时间例如20s或30s进行一次通讯读数,记录当前出水重量。三维移动控制器用于控制对样品池组件120中的样品池121进行三维移动,具体控制三维移动平台129的动作,进行上下、左右、前后移动。
[0078]
设备开启,主控制器410发送指令给膜过滤控制单元420中的供气控制器,气压罐开启,将污水输送至样品池组件120中的过滤膜500进行过滤,压力送变表或压力表将管路101压力信息传输给主控制器410,主控制器410控制气压罐或压力控制阀控制管路101压力和流量,同时,主控制器410控制称重过滤器,完成对过滤后的滤液进行称重,并将称重信息反馈给主控制器。检测结束,主控制器410发送指令给膜过滤控制单元420中的供气控制器,气压罐关闭。
[0079]
成像控制单元430控制对象为扫描-反扫描耦合组件220中的扫描振镜221、反扫描
振镜223、位移件、高光谱成像仪控制器,主控制器410发送移动指令控制扫描振镜-反扫描振镜同时移动,扫描振镜221和反扫描振镜223工作,并控制位移件进行调整。主控制器410发送指令控制高光谱成像仪控制器进行成像。主控制器410发送信号给扫描振镜221和反扫描振镜223,通过电压控制其内部反射镜角度。扫描振镜221控制照明光束沿垂直光束传播方向移动完成平面扫描照明,反扫描振镜223同步移动,将光束反射至光谱成像仪内,完成二维光谱成像。
[0080]
主控制器410发送信号给样品池121下方的三维移动平台129和反扫描透镜组中的位移件,同步移动完成三维光谱成像。
[0081]
以上协同控制机构的具体器件和控制信号流的具体实施方式可以采用现有技术,在此不再赘述。
[0082]
协同控制系统400是基于labview软件开发,编程实现对光学成像模块及膜过滤模块的综合控制。通过编写labview程序实现人机交互,整体采用状态机架构、通过顺序结构和触发事件等操作实现对硬件命令的流程化处理,结合串口通讯、调用驱动、子vi等方式实现对硬件或下位机的集成控制。软件包括调试模式和采集模式。在调试模式下,软件扫描-反扫描耦合组件220中的振镜、过滤成像装置组件的三维位移平台进行成像调试;采集模式下,软件协调控制二维振镜、位移台及高光谱成像仪,进行多光学选择面的快速膜污染高光谱三维成像。
[0083]
实施例2,在本技术的适用于膜过滤的荧光高光谱三维在线原位成像分析方法中,包括步骤:s1、通过协同控制机构控制高光谱三维成像机构对样品池组件的过滤膜成像以获取所述过滤膜对应的、包含污染物信息的三维光谱成像。即,基于上述的分析装置,通过协同控制机构控制膜过滤机构和高光谱三维成像机构的位置关系,使得高光谱三维成像机构能够对膜过滤机构中样品池组件过滤膜的某一特定切面进行成像,得到对应的三维光谱成像。其中三维光谱成像信息中包含过滤膜上污染物信息。其中各个机构之间的配合过程可以参照上文表述。
[0084]
s2、通过所述协同控制机构控制高光三维成像在线分析机构对所述三维光谱成像进行图像分析以提取所述过滤模对应的污染物成分,并对每一污染物分别生成包含污染物种类和分布信息的彩色污染物分布图像。具体的,在得到过滤膜切面对应的三维光谱图像后,通过高光三维成像在线分析机构对其该三维光谱成像进行图像分析,从中提取过滤膜该切面对应的污染物成分,并根据污染物成分对每一污染物种类和分布信息生成对应的彩色污染物分布图像。例如,其可以生成的彩色污染物分布图像中,可以包含该污染物的种类信息和其在所有污染物成分中的占比信息。
[0085]
可选的,在一实施例中,本发明的荧光高光谱三维在线原位成像分析方法还包括:s3、通过所述协同控制机构监测所述过滤膜的使用状态,并在所述过滤膜的使用过程中,按照预设时间间隔依次获取每一污染物对应的若干所述彩色污染物分布图像并生成所述污染物的变化过程图像。即,监测过滤膜的使用状态,在过滤膜正常使用过程中,依照时间顺序记录每一预设时间点过滤膜预设切面对应的彩色污染物分布图像,并基于时间顺序依次记录得到同一污染物的变化过程。该变化过程可以体现在生成一系列的该污染物的彩色污染物分布图像,并按照时间顺序进行排列。基于该过程可以快捷的实现过滤膜同一切面中污染物形成过程的直观记录。对于多个污染物,其可以对每一污染物分别记录,形成多个污
染物的彩色污染物分布图像的图像矩阵,使得直观的得到过滤膜整个污染过程中各污染物的分布变化规律。
[0086]
可选的,在本发明的荧光高光谱三维在线原位成像分析方法中,在所述步骤s2中,所述高光三维成像在线分析机构对所述三维光谱成像进行图像分析以提取所述过滤模对应的污染物成分;包括:s21、对所述三维光谱成像依次进行背景去除、光谱堆去噪、深度学习图像增强和波段信噪比分析,以得到包含各污染物的波长信息的高光谱数据。在得到不含背景数据的纯净信号数据后,基于光谱去噪算法对该信号数据进行光谱堆去噪,其去噪过程可以采用主成分分析(pca)或者最小噪声分离(mnf)。光谱去噪后,经过深度学习图像增强处理以提高得到的光谱的信噪比,以方便在后续的波段信噪比分析过程中,更容易的剔除无效信号即信噪比较低的波段数据,以最大限度的保留有用光谱信号,保证光谱分解正确率。其中各个阶段的具体处理过程可以通过上述的图像预处理模块310的工作过程得到,在这里不再赘述。
[0087]
s22、基于待提取污染物的类别数量对所述高光谱数据进行分解以得到个数为所述类别数量的波长信息。具体的,在得到高光谱数据后,可以通过高光谱解混模块320进行光谱对应的波长提取,其中可以基于过滤膜的使用场景预设过滤膜对应的污染物的类型数量信息,根据该类别数量对高光谱数据分解得到数量等于该类别数量的波长信息,其简单的理解即当设置可能存在多少种污染物时,即可以从高光谱数据中分解出多少组波长信息。其中具体的分解过程可以参照上文中高光谱解混模块320的工作过程,这里不再赘述。
[0088]
s23、对所述波长信息进行判断,在所述波长信息合法根据所述波长信息分别获取所述污染物的类别信息,在所述波长信息不合法时,修改所述待提取污染物的类别数量,并执行步骤s23。具体的,在得到若干组的波长信息后,对得到的波长信息进行判断,确认得到的单个波长对应的光谱图形形状是否正确,即是否符合荧光光谱团的一般规律。如果得到的光谱图形形状符合荧光光谱团的一般规律,则判定得到的波长信息合法,那么此时可以判定得到的污染物种类和数量准确,可以进行污染物分析。如果得到的光谱图形形状不符合荧光光谱团的一般规律,则说明此时对污染物的种类数量判断异常,此时需要对预设的污染物种类数量进行修正再次基于修正后的污染物种类数量进行高光谱分解。直到得到的光谱图形形状合法。
[0089]
基于上述过程,可以直观的得到过滤膜特定区域的污染物沉积过程中污染物的变换过程。其可以通过对过滤膜的多个区域进行上述的分析过程,则可以得到整个过滤膜中污染物的变换过程,继而得到过滤膜的在使用过程中的污染过程。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。