1.本发明涉及一种探地雷达装置,尤其涉及一种用于检测竖直壁面隐蔽缺陷的探地雷达装置,并进一步涉及用于检测竖直壁面隐蔽缺陷的探地雷达控制方法。
背景技术:
2.近年来,探地雷达作为无损检测中最为快捷有效的手段之一,出现在众多构筑物的检测场景中,其快速、准确以及易操作的特点深受检测行业喜爱。然而,在使用探地雷达检测某些特定的构筑物如桥墩和坝体等竖直壁面时,操作较为不便。
3.目前,有以下几种方式方法:1、借助绳索等辅助设备牵引探地雷达装置在竖直壁面移动进行检测,这种方式明显地依赖于人力,效率低且成本高。2、将探地雷达装置固定在滑轨上,然后将滑轨由人力固定在竖直壁面上进行检测;但是这种方法通过预先定制滑轨长度,并将滑轨安装在待测体上,以替代人力去固定滑轨,可以长期进行检测,但是缺点是安装和维护成本较高,且单次检测准备工作较多,操作耗时较久,效率低下。3、将探地雷达固定在爬壁机器人上,由爬壁机器人携带探地雷达进行竖直壁面检测;其存在缺点是真空吸附移动较慢,且只能针对相较光滑的墙壁进行真空吸附检测,使用场景较为局限。4、设计用旋翼反推力技术将探地雷达设备吸附在强壁上进行移动检测,其检测速度较快;但是依然存在明显的缺点:电量消耗快,续航时间短,且无法实时查看数据,需要在很短的时间内将数据采集完毕,待机器人返回后再进行数据解译,因此,后续重新定位解译出的壁面隐患点也较为困难,导致整体检测效率较低,且成本高。
技术实现要素:
4.本发明所要解决的技术问题是需要提供一种受被测面的平整度影响小,且能够为实时解译提供基础的用于检测竖直壁面隐蔽缺陷的探地雷达装置,进而旨在有效地降低成本和使用场景的局限性,并提高工作效率。在此基础上,还进一步提供用于检测竖直壁面隐蔽缺陷的探地雷达控制方法。
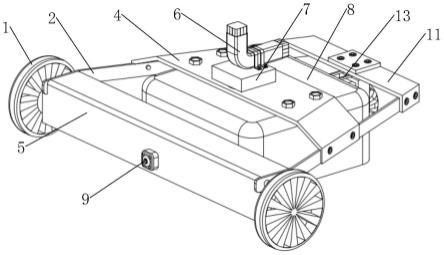
5.对此,本发明提供一种用于检测竖直壁面隐蔽缺陷的探地雷达装置,包括:主体机架、主动轮模组、转向轮模组、旋转基座、反冲力装置以及中控盒体,所述主动轮模组对称设置于所述主体机架前端的两侧,所述转向轮模组对称设置于所述主体机架的后端,所述中控盒体设置于所述主体机架的中间位置,所述反冲力装置通过所述旋转基座设置于所述中控盒体的正上方,且所述反冲力装置的压力作用点与所述旋转基座的中心点相重合;所述探地雷达装置整体左右对称,其重心作用点与结构中心点重合,并与所述反冲力装置的压力作用点重合。
6.本发明的进一步改进在于,所述反冲力装置包括高压进气管道和高压出气管道,所述高压进气管道与所述主动轮模组和转向轮模组所在的待测壁面相平行。
7.本发明的进一步改进在于,所述高压出气管道通过折弯连接部连接至所述高压进气管道,所述高压出气管道与所述高压进气管道保持垂直。
8.本发明的进一步改进在于,还包括空压机,所述空压机的出风口与所述高压进气管道密封连接,所述空压机的压强其中,g为所述探地雷达装置及空压机管道的重力,μ为表面摩擦系数,s为空压机出风口的横截面积,p2为空压机的外部压强。
9.本发明的进一步改进在于,还包括第一喷漆管和第二喷漆管,所述第一喷漆管和第二喷漆管分别设置于所述中控盒体的侧下方和后下方。
10.本发明的进一步改进在于,还包括设置于所述中控盒体上方的中控盒体支架,所述旋转基座的下方通过固定轴连接至所述中控盒体支架,所述旋转基座嵌套旋转式设置于所述固定轴的上方,且所述旋转基座的一侧设置有网线接口和电源接口。
11.本发明的进一步改进在于,还包括摄像机,所述主动轮模组包括主动轮、主动轮连接轴以及动力传动轴,所述主动轮对称设置于所述主动轮连接轴的左右两侧,所述动力传动轴连接至所述主动轮连接轴的中间;所述摄像机安装在所述主动轮连接轴的前方。
12.本发明的进一步改进在于,所述转向轮模组包括转向轮支架、转向传动皮带和万向轮,所述万向轮设置于所述转向轮支架的中央下方,并与所述转向传动皮带相连接。
13.本发明的进一步改进在于,还包括地面控制端,所述中控盒体包括主控单元、喷漆控制单元、转向控制单元、动力控制单元、探地雷达控制单元以及摄像机控制单元,所述地面控制端与所述主控单元相连接,所述喷漆控制单元、转向控制单元、动力控制单元、探地雷达控制单元以及摄像机控制单元分别与所述主控单元相连接,所述探地雷达控制单元和摄像机控制单元分别与所述动力控制单元相连接。
14.本发明还提供一种用于检测竖直壁面隐蔽缺陷的探地雷达控制方法,采用了如上所述的用于检测竖直壁面隐蔽缺陷的探地雷达装置,并包括以下步骤:
15.步骤s1,通过所述地面控制端向所述探地雷达装置发送采集命令,所述中控盒体的主控单元接收到采集命令后,控制所述探地雷达控制单元和摄像机控制单元进入工作状态;
16.步骤s2,通过所述地面控制端向所述探地雷达装置实时发送运动命令,所述运动命令包括前进命令、后退命令以及转向命令,所述中控盒体的主控单元接收到命令后,实时控制所述动力控制单元和转向控制单元做出相应的动作;
17.步骤s3,接收到所述动力控制单元传输的位移信息,并根据所述位移信息触发所述探地雷达控制单元和摄像机控制单元进行数据采集;
18.步骤s4,通过所述主控单元实时将探地雷达数据和高清图像数据传输到地面控制端,并在检测到隐患数据信息之后,跳转至步骤s5;
19.步骤s5,通过所述地面控制端向所述探地雷达装置发送标记命令,所述中控盒体的主控单元接收到标记命令后,控制所述喷漆控制单元进行喷漆标记。
20.与现有技术相比,本发明的有益效果在于:采用反冲力装置以及其它相配套的模组/结构实现反冲力吸附,有效地降低了对被测壁面平整度的要求以及对使用环境的局限性,提高了探地雷达装置行进的灵活性和速度,提高了整体的检测效率;并且,无需前期安装,无需后期维护,没有繁琐的准备工作,成本低廉且操作简单。在此基础上,还能够实时向地面控制端传输探地雷达数据和高清图像数据,以便为实时解译雷达数据提供了很好的基础,在检测的过程中,一旦发现竖直壁面隐患,即可立即进行喷漆标记,避免后期额外花费
大量时间定位竖直壁面隐患,大幅度地节省了所需要的工作时间,再进一步提高了整体的检测效率及其精准程度。
附图说明
21.图1是本发明一种实施例的立体结构示意图;
22.图2是本发明一种实施例在另一视角下的立体结构示意图;
23.图3是本发明一种实施例的俯视结构示意图;
24.图4是本发明一种实施例的后视结构示意图;
25.图5是本发明一种实施例的反冲力作用原理示意图;
26.图6是发明一种实施例的中控盒体的模组结构示意图。
27.附图标识:1-主动轮;2-主体机架;3-第一喷漆管;4-中控盒体支架;5-主动轮连接轴;6-反冲力装置;601-高压进气管道;602-折弯连接部;603-高压出气管道;7-旋转基座;8-中控盒体;801-主控单元;802-喷漆控制单元;803-转向控制单元;804-动力控制单元;805-探地雷达控制单元;806-摄像机控制单元;9-摄像机;10-万向轮;11-转向轮支架;12-第二喷漆管;13-转向传动皮带;14-动力传动轴;15-地面控制端。
具体实施方式
28.下面结合附图,对本发明的较优的实施例作进一步的详细说明。
29.如图1至图6所示,本实施例提供一种用于检测竖直壁面隐蔽缺陷的探地雷达装置,包括:主体机架2、主动轮模组、转向轮模组、旋转基座7、反冲力装置6以及中控盒体8,所述主动轮模组对称设置于所述主体机架2前端的两侧,所述转向轮模组对称设置于所述主体机架2的后端,所述中控盒体8设置于所述主体机架2的中间位置,所述反冲力装置6通过所述旋转基座7设置于所述中控盒体8的正上方,且所述反冲力装置6的压力作用点与所述旋转基座7的中心点相重合;所述探地雷达装置整体左右对称,其重心作用点与结构中心点重合,并与所述反冲力装置6的压力作用点重合。
30.本实施例所述中控盒体8是整个探地雷达装置的核心,优选通过树脂螺丝安装固定在所述中控盒体支架4的正下方。所述中控盒体8外部的侧面靠下和后侧靠下的位置伸出有第一喷漆管3和第二喷漆管12,在收到标记命令时,可以精准快速喷漆以标记隐患点,便于后续进行维保工作时,快速定位隐患点。
31.值得说明的是,本实施例所述第一喷漆管3和第二喷漆管12分别设置于所述中控盒体8的侧下方和后下方,这样的设计,能够通过侧方标识位置、后方标识位置以及探地雷达装置的中心点实现三角标识,便于在发现竖直壁面隐患的时候,即可快速且准确地进行喷漆标记,且标记位置精准,避免后期额外花费大量时间定位竖直壁面隐患。本实施例能够大幅度地节省了所需要的工作时间,再进一步提高了整体的检测效率及其精准程度。
32.如图6所示,本实施例还包括地面控制端15,所述中控盒体8包括主控单元801、喷漆控制单元802、转向控制单元803、动力控制单元804、探地雷达控制单元805以及摄像机控制单元806,所述地面控制端15与所述主控单元801相连接,所述喷漆控制单元802、转向控制单元803、动力控制单元804、探地雷达控制单元805以及摄像机控制单元806分别与所述主控单元801相连接,所述探地雷达控制单元805和摄像机控制单元806分别与所述动力控
制单元804相连接。所述喷漆控制单元802与所述第一喷漆管3和第二喷漆管12相对应,用于实现喷漆控制;所述转向控制单元803与所述转向轮模组相对应,用于实现所述万向轮10的转向控制;所述动力控制单元804与所述主动轮模组相对应,用于实现主动轮1的驱动控制;所述探地雷达控制单元805用于实现探地雷达的控制;所述摄像机控制单元806用于实现摄像机9的控制。
33.本实施例还包括设置于所述中控盒体8上方的中控盒体支架4,所述旋转基座7的下方通过固定轴连接至所述中控盒体支架4,所述旋转基座7嵌套旋转式设置于所述固定轴的上方,且所述旋转基座7的一侧设置有网线接口和电源接口。更为具体的,本实施例所述旋转基座7主要有上下两部分,下部呈圆柱形固定在所述中控盒体支架4的上方,不可转动,以便形成稳定可靠的连接结构;上部是一个长方体基座,嵌套在下部圆柱形基座上方,可以旋转,以便配合所述反冲力装置6的工作需求。所述旋转基座7的一侧优选设置的是网线rj45接口和4芯电源接口,通过4芯电源接口采用有线的方式为装置供电,保证电量供应,既可以长期作业,告别续航焦虑,也可以基于这种设计加装更多设备,扩展性能强;通过网线rj45接口能够实现有线数据的传输,数据传输速度远快于无线传输,可以实时传输海量数据,且稳定可靠,能够为实时解译雷达数据以及高清图像提供更好的基础。
34.本实施例的进一步改进在于,所述反冲力装置6包括高压进气管道601、折弯连接部602和高压出气管道603,构成一个“l”型的反冲管道装置;所述高压进气管道601与所述主动轮模组和转向轮模组所在的待测壁面相平行,所述高压出气管道603通过折弯连接部602连接至所述高压进气管道601,所述高压出气管道603与所述高压进气管道601保持垂直。
35.本实施例还包括空压机,所述空压机的出风口与所述高压进气管道601密封连接,所述空压机的压强其中,g为所述探地雷达装置及空压机管道的重力,μ为表面摩擦系数,s为空压机出风口的横截面积,p2为空压机的外部压强。
36.值得说明的是,本实施例所述反冲力装置6的压力作用点与所述旋转基座7的中心点相重合;所述探地雷达装置整体左右对称,所述探地雷达装置的重心作用点与结构中心点重合,并与所述反冲力装置6的压力作用点重合,这样的设计能够使得力的相互作用达到最高效的状态,有利于所述探地雷达装置在较小的反冲力吸附作用下,依然能够保持平稳运动和平衡,不易发生倾覆,降低了使得所述探地雷达装置平稳吸附所需要的最小反冲力,能够再进一步降低所述探地雷达装置的应用成本和对使用环境的局限性。
37.在本实施例应用于爬壁检测时,通过所述反冲力装置6提供足够的垂直于壁面并指向壁面的压力f产生足够的摩擦力f,从而克服自身及空压机管道的重力g吸附在竖直壁面上。其中,摩擦力f计算公式为:f=μ*f,μ为表面摩擦系数。因此,克服重力所需的压力f可表示为:f≥g/μ,压力f大小即反冲力装置6提供的反冲力大小f。其中,反冲力f计算公式为:f=δp*s=(p
1-p2)*s,p1为装置内压强,p2为装置外压强,即大气压,δp为压强差,s为空压机出风口的横截面积(即排气口的截面积)。因此,当所述空压机的压强p1满足这一条件是,所述探地雷达装置即可很好地吸附在竖直壁面上,实现竖直壁面隐蔽缺陷的检测。
38.值得一提的是,本实施例所述反冲力装置6的压力作用点与所述旋转基座7的中心
点相重合,即所述反冲力装置6的压力作用点位于旋转基座7的上部方形基座的中心,以便与反冲力装置6提供的压力f作用点重合。这个设计除了上面所述有利于所述探地雷达装置在较小的反冲力吸附作用下实现竖直壁面吸附之外,还能够有利于保持运动过程中的平稳吸附,以便应对不同的壁面环境,降低对壁面平整度的要求,当所述旋转基座7在旋转时,压力f的作用中心始终位于所述旋转基座7的中心,哪怕壁面平整度不高,但是所述高压进气管道601与所述主动轮模组和转向轮模组所在的待测壁面相平行,那么,就依然能够保证随着所述旋转基座7的旋转,不改变本实施例所述探地雷达装置的受力状态,稳定可靠地保持平稳吸附。
39.同样值得一提的是,在爬壁检测过程中,应当保持空压机管道与待测壁面平行,即保持所述高压进气管道601与所述主动轮模组和转向轮模组所在的待测壁面相平行,避免产生夹角;如果产生夹角其受力状态应当如图5右侧示意图所示,导致空压机管道的拉力f3与待测壁面产生一定的夹角,从而产生垂直于待测壁面且指向壁面外方向的分力,进而抵消部分所述反冲力装置6所提供的压力f2,就容易导致所述探地雷达装置的坠落。本实施例所述高压进气管道601的拉力f3与本实施例所述的探地雷达装置的重力g1方向重合,在所述高压进气管道601与所述主动轮模组和转向轮模组所在的待测壁面相平行时,实际受力状态如图5左侧受力分析示意图所示,空压机管道与待测壁面不再出现夹角,就能够很好地避免所述探地雷达装置的坠落弊端。
40.如图1至图3所示,本实施例还包括摄像机9,所述主动轮模组包括主动轮1、主动轮连接轴5以及动力传动轴14,所述主动轮1对称设置于所述主动轮连接轴5的左右两侧,可以在所述动力传动轴14的带动下进行顺时针或者逆时针转动,即前进或后退,所述动力传动轴14连接至所述主动轮连接轴5的中间;所述摄像机9安装在所述主动轮连接轴5的正前方,以便在实现探地雷达数据采集的时候,同步采集高清图像数据,并保持整体装置的左右对称设计以及中心和中心相重合的设计。
41.如图1至图3所示,本实施例所述转向轮模组包括转向轮支架11、转向传动皮带13和万向轮10,所述万向轮10优选通过树脂螺丝设置于所述转向轮支架11的中央下方,转弯半径为车身宽度,极为灵活。所述万向轮10与所述转向传动皮带13相连接,便于在转向传动皮带13的带动下转动,帮助所述探地雷达装置在移动过程中转向。
42.在实际应用过程中,无需前期安装,无需后期维护,没有繁琐的准备工作。首先,将空压机出风口与所述反冲力装置6的高压进气管道601连接紧密并密封;将数据传输线缆和电源线缆连接至所述旋转基座7侧面的接口;开启空压机,并将本实施例所述的探地雷达装置置于待测竖直壁面上,待所述探地雷达装置平稳吸附于壁面后,即可进行竖直壁面隐蔽缺陷的检测。
43.本实施例还提供一种用于检测竖直壁面隐蔽缺陷的探地雷达控制方法,采用了如上所述的用于检测竖直壁面隐蔽缺陷的探地雷达装置,并包括以下步骤:
44.步骤s1,通过所述地面控制端15向所述探地雷达装置发送采集命令,所述中控盒体8的主控单元801接收到采集命令后,控制所述探地雷达控制单元805和摄像机控制单元806进入工作状态;
45.步骤s2,通过所述地面控制端15向所述探地雷达装置实时发送运动命令,所述运动命令包括前进命令、后退命令以及转向命令,所述中控盒体8的主控单元801接收到命令
后,实时控制所述动力控制单元804和转向控制单元803做出相应的动作;
46.步骤s3,接收到所述动力控制单元804传输的位移信息,并根据所述位移信息触发所述探地雷达控制单元805和摄像机控制单元806进行数据采集;
47.步骤s4,通过所述主控单元801实时将探地雷达数据和高清图像数据传输到地面控制端15,并在检测到隐患数据信息之后,跳转至步骤s5;
48.步骤s5,通过所述地面控制端15向所述探地雷达装置发送标记命令,所述中控盒体8的主控单元801接收到标记命令后,控制所述喷漆控制单元802进行喷漆标记。
49.综上所述,本实施例采用反冲力装置6以及其它相配套的模组/结构实现反冲力吸附,有效地降低了对被测壁面平整度的要求以及对使用环境的局限性,提高了探地雷达装置行进的灵活性和速度,提高了整体的检测效率;并且,无需前期安装,无需后期维护,没有繁琐的准备工作,成本低廉且操作简单。在此基础上,还能够实时向地面控制端15传输探地雷达数据和高清图像数据,以便为实时解译雷达数据提供了很好的基础,在检测的过程中,一旦发现竖直壁面隐患,即可立即进行喷漆标记,避免后期额外花费大量时间定位竖直壁面隐患,大幅度地节省了所需要的工作时间,再进一步提高了整体的检测效率及其精准程度。
50.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。