1.本发明涉及对本车行驶的周围环境结构与地图信息中记录的结构信息进行对照来推算地图中的本车位置的车辆控制装置和本车位置推算方法。
背景技术:
2.以往,作为对定位装置所检测出的车辆的当前位置进行修正的技术,提出了结合使用卫星定位的本车位置推算、以及使用车辆中搭载的摄像机等外界传感器识别地标与事先在地图信息中记录的地标位置进行对照而进行的本车位置推算,由此推算进一步提高了精度的本车位置的技术。
3.例如,专利文献1中,在段落0038中记载了“第一车辆位置检测部23基于定位部2的测量结果和地图数据库5的地图信息,检测车辆在地图上的位置即第一车辆位置。”的记载,在段落0039中有“第一车辆位置检测部23通过对从摄像机的拍摄图像中提取的白线的边缘点与地图信息中包括的白线的位置信息进行对照来对车辆的位置进行修正”。即,专利文献1公开了对用卫星定位得到的本车位置基于摄像机的检测结果进行修正来改善本车位置的推算精度的自动驾驶系统。
4.另外,专利文献1的权利要求1中记载了“一种执行车辆的自动驾驶控制的自动驾驶系统,其特征在于,包括:测量所述车辆的位置的定位部;存储地图信息的地图数据库;第一车辆位置检测部,其基于所述定位部的测量结果和所述地图数据库的所述地图信息,来检测所述车辆在地图上的位置即第一车辆位置;行驶场景识别部,其基于所述第一车辆位置检测部检测出的所述第一车辆位置和所述地图数据库的所述地图信息,来识别所述车辆的行驶场景;第二车辆位置检测部,其基于所述车辆中搭载的摄像机的拍摄图像或所述车辆中搭载的雷达传感器的检测结果、所述定位部的测量结果和所述地图数据库的所述地图信息,通过与所述行驶场景预先关联的位置检测处理,来检测所述车辆在地图上的位置即第二车辆位置;判断部,其判断所述第一车辆位置与所述第二车辆位置的差是否在阈值以下;和自动驾驶控制部,其在判断为所述第一车辆位置与所述第二车辆位置的差在阈值以下的情况下,基于所述第二车辆位置执行所述车辆的所述自动驾驶,在判断为所述第一车辆位置与所述第二车辆位置的差不在所述阈值以下的情况下,基于所述第一车辆位置执行所述车辆的所述自动驾驶控制”。即,专利文献1中,公开了对所述第一车辆位置与通过与行驶场景关联的位置检测处理得到的第二车辆位置进行比较,基于两者的差的大小来切换采用哪个车辆位置,由此改善本车位置的推算精度的自动驾驶系统。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2017-138282号公报
技术实现要素:
8.发明要解决的课题
9.专利文献1公开的方案为:与所行驶的车道的白线种类、行驶路面的倾斜、隧道内外等行驶环境相应地选择切换检测所述第二车辆位置的方法,由此与行驶场景相应地选择位置计算方法,实现精度改善。
10.但是,关于求出第二车辆位置的位置检测处理,仅与环境相应地切换位置检测处理方法,例如只能与路面上描绘的白线和隧道等行驶地点的固定的环境对应地切换本车的检测位置。
11.另一方面,自动驾驶系统中使用的gnss(global navigation satellite system:全球定位卫星系统)中,因为接收机周围存在的建筑物等遮挡物环境和该日期时间的定位卫星的配置,检测出的本车位置有偏差地输出,但因为直接使用该存在位置偏差的本车位置,所以存在精度恶化的课题。
12.鉴于这样的课题,本发明的目的在于提供一种能够与环境变化相应地适当地学习基于gnss推算的本车位置的修正量的车辆控制装置和本车位置推算方法。
13.用于解决课题的技术方案
14.为了解决上述课题,本发明的车辆控制装置具有推算本车位置的本车位置推算部,所述本车位置推算部包括:绝对位置推算部,其基于从gnss获取的绝对位置信息来推算第一车辆位置;相对位置推算部,其基于从车外获取的相对位置信息来推算第二车辆位置;行驶状态判断部,其基于车辆信息或卫星信息来判断本车的行驶状态的变化;差运算部,其在使所述第一车辆位置与所述第二车辆位置的时刻同步之后运算差量;学习部,其对于每个所述行驶状态将所述差量蓄积为时序数据,基于蓄积的时序数据来学习每个所述行驶状态的所述第一车辆位置的修正量;和位置修正部,其基于由该学习部计算出的修正量来修正所述第一车辆位置。
15.另外,本发明的本车位置推算方法包括:基于从gnss获取的绝对位置信息来推算第一车辆位置的步骤;基于从车外获取的相对位置信息来推算第二车辆位置的步骤;基于车辆信息或卫星信息来判断本车的行驶状态的变化的步骤;在使所述第一车辆位置与所述第二车辆位置的时刻同步之后运算差量的步骤;对于每个所述行驶状态将所述差量蓄积为时序数据,并基于所蓄积的时序数据来学习每个所述行驶状态的所述第一车辆位置的修正量的步骤;和基于通过学习获得的修正量来修正所述第一车辆位置的步骤。
16.发明的效果
17.gnss中的定位受到周围的结构物引起的遮挡、衍射、反射的影响、因本车动作变化而发生误差的影响、以及定位使用的卫星的组合的影响,相对于准确的本车位置具有误差。这样的误差在周围的结构物的环境固定、并且本车动作变化较少、并且用于定位的卫星的组合不变这样的行驶环境固定的期间中并不会大幅变动。
18.因此,固定的行驶环境持续的情况下,如果可以使用外界传感器得到本车的正确的位置,则能够得到与其相对的定位坐标的偏差,能够使用该偏差计算改善了精度的定位坐标。另外,在行驶环境变化的情况下,通过再次重新计算修正量即偏差,能够得到对于每个行驶环境最优的修正量。
19.从而,根据本发明的车辆控制装置和本车位置推算方法,通过与行驶环境和行驶状态相应地学习定位位置的适当的修正量(偏移量),排除行驶状态变化的影响,即使行驶环境和行驶状态变化,也能够高频度地得到地图中的本车位置的高精度的推算。
附图说明
20.图1是包括实施例1的本车位置推算部的电子控制单元的结构图。
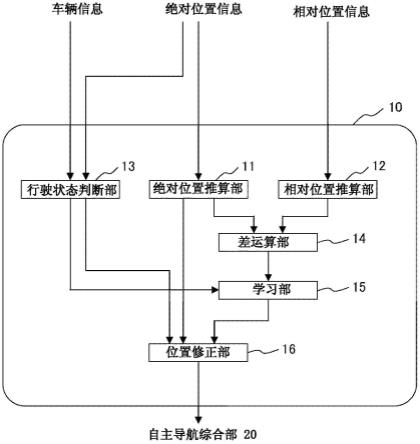
21.图2是实施例1的本车位置推算部的框图。
22.图3是表示相对位置推算部的处理内容的流程图。
23.图4是转弯的行驶车辆例的示意图。
24.图5是表示转弯的行驶车辆例的舵角和车辆方位角的示意图。
25.图6是根据车速判别行驶环境的情况的表。
26.图7是表示本车位置的推算时机的示意图。
27.图8是表示位置修正部的处理内容的流程图。
28.图9是实施例2的本车位置推算部的框图。
29.图10是表示实施例2的相对位置推算部的处理内容的流程图。
30.图11是用外界识别传感器识别人行横道时的说明图。
31.图12是计算与位于倾斜的道路上的人行横道的相对关系时的说明图。
32.图13是计算与位于倾斜的道路上的人行横道的相对关系时的说明图。
具体实施方式
33.以下,对于本发明的车辆控制装置的实施例,使用附图进行说明。
34.实施例1
35.图1是说明具有本发明的实施例1的本车位置推算部10的车辆控制装置100的框图。如此处所示,车辆控制装置100包括本车位置推算部10、自主导航综合部20、地图对照部30、自动驾驶控制部40。另外,车辆控制装置100与车辆信息接收部1a、绝对位置获取传感器1b、相对位置获取传感器1c、致动器1d、hmi(human machine interface:人机接口)1e、存储有地图数据m的存储装置和路径生成部50连接。
36.本车位置推算部10基于来自车辆信息接收部1a的车辆信息、来自绝对位置获取传感器1b的绝对位置信息和来自相对位置获取传感器1c的相对位置信息,来推算本车位置并将该位置推算结果发送至自主导航综合部20。
37.自主导航综合部20基于来自车辆信息接收部1a的车辆信息和本车位置推算部10的位置推算结果,计算本车位置并将其输出至地图对照部30。
38.地图对照部30中,基于自主导航综合部20的位置推算结果和地图数据m,来推算地图中的本车位置。进而,地图对照部30的结果被发送至自动驾驶控制部40。
39.自动驾驶控制部40,基于该地图中的本车位置推算结果和用路径生成部50生成的驾驶路径控制致动器1d,实现车辆v的自动驾驶。
40.致动器1d例如是用于驱动车辆v的转向系统、驱动系统、制动系统等的各种致动器,hmi1e例如是驾驶员操作的方向盘、加速踏板、刹车踏板和检测它们的操作量的传感器等。
41.另外,车辆控制装置100具体而言是具有cpu等运算装置、半导体存储器等主存储装置、辅助存储装置和通信装置等硬件的电子控制单元(ecu,electronic control unit),通过由运算装置执行载入至主存储装置的程序来实现本车位置推算部10等各种功能,但以下适当省略这样的计算机领域的周知技术地,说明各部的详情。
42.<本车位置推算部10>
43.图2是说明本车位置推算部10的详情的框图。如此处所示,本车位置推算部10具有绝对位置推算部11、相对位置推算部12、行驶状态判断部13、差运算部14、学习部15和位置修正部16。
44.<绝对位置推算部11>
45.绝对位置推算部11例如基于从gnss的接收装置或能够接收伪卫星(pseudolite)等的定位无线电波的接收装置等绝对位置获取传感器得到的信号(绝对位置信息和卫星定位状态信息),使用用于识别本车的绝对位置的1个以上的传感器来推算本车位置。另外,用绝对位置获取传感器进行的本车位置和姿态的推算是高频度地进行的,例如gnss的定位间隔大多是0.1秒至1秒程度,可以认为该定位间隔对于自动驾驶系统的路径导向功能而言更新周期是充分高速的。
46.另外,用gnss进行的定位中,接收从定位卫星发送的定位无线电波,基于其到达时刻测量量位卫星与接收机天线之间的距离。因为卫星配置信息被叠加在定位无线电波中,所以定位卫星的位置是已知的,得到多个与它们的距离时,能够计算接收机的位置。但是,定位卫星与接收机天线之间存在遮挡物或者附近存在结构物时,定位卫星与接收机天线之间的距离可能因遮挡、衍射、反射的影响而变得不准确。进而,不仅可以从gnss的接收装置得到本车位置,也可以得到通过观测利用多普勒现象的来自各卫星的定位无线电波的频率变动而能够测量的本车行进方位和行驶速度。
47.另外,伪卫星中因为是与gnss同样的系统,所以能够将定位卫星替换为伪卫星信号发射器,具有与gnss类似的特性。
48.<相对位置推算部12>
49.相对位置推算部12使用c2x装置和/或标记读取装置,高精度地推算本车的位置。c2x装置和标记读取装置得到以本车的行驶环境中设置的标记为基准的相对位置、以从发射器输出的位置信息为基准的相对位置,所以也称为相对位置获取传感器1c。并且,相对位置推算部12中,从标记或发射器的位置信息和以该位置信息为基准的本车的相对位置,计算并输出本车的绝对位置。
50.作为相对位置获取传感器1c的观测对象的标记或发射器与本车的距离较短,进而不产生衍射、反射引起的位置误差,所以与绝对位置推算部11的位置推算结果相比,能够期待相对位置推算部12的位置推算结果精度更高。另一方面,相对位置推算部12进行的本车位置和姿态的推算仅在存在标记的场所、或c2x通信成立的场所进行。因此,可以认为它在时间或空间的观点上是离散的。
51.对于上述c2x装置和标记读取装置进行说明。c2x装置例如指的是识别环境中配置的信标发射器的信标接收机、与无线lan(local area network)通信或bluetooth通信等的访问接入点装置之间的路车间通信装置、用于从其他车辆接收信息的车车间通信装置等。标记读取装置例如对于环境中配置的特征性的标线和标志、带有磁性的标签等标记,使用摄像机或磁传感器等对应的传感器,检测标记的种类和位置、姿态等标记信息,将该标记信息发送至相对位置推算部12。
52.<行驶状态判断部13>
53.因为gnss的偏差倾向因(1)转弯角度和车速等车辆信息、(2)卫星配置和可见卫星
数等卫星信息等变化而变动,所以行驶状态判断部13具有判断同一行驶环境持续的功能、判断行驶状态变化的时机的功能中的任一者或两者。关于车辆信息和接收环境,将各参数值蓄积为时序信息,在规定的参数值变化的情况和各自在一定时间中的变化量超过了规定阈值的情况、参数的变化量的累计超过了一定值等情况下判断为行驶状态发生了变化。另外,行驶状态判断部13将该输出结果发送至学习部15。
54.对于上述车辆信息进行说明。车辆信息中包括从配置于车轴部的旋转速度传感器、以及配置在各车轮附近的每当车轮旋转一定角度时输出脉冲的车轮速度脉冲传感器、输出每单位时间的车轮速度脉冲数的车轮速度脉冲数传感器等得到的车速信息、从输出转向轮的角度的舵角传感器、输出方向盘的旋转量的方向盘角度传感器等得到的舵角信息、表示前进后退状态和变速状态等的变速档位信息等。
55.对于上述卫星信息进行说明。卫星信息指的是从gnss接收机得到的定位fix状态、位置精度和速度精度等各精度指标、pdop和vdop等各精度劣化指标、定位使用卫星数、各定位卫星的接收信号强度和多路径标志等关于gnss定位的各种参数。
56.<差运算部14>
57.差运算部14计算绝对位置推算部11和相对位置推算部12各自输出的本车位置的差。如上所述,绝对位置推算部11高频度地输出推算位置,但是取决于行驶状况存在偏差增大的情况。另外,相对位置推算部12与绝对位置推算部11相比输出频度更小,但输出更高精度的推算位置。因此,计算这些推算位置的差的情况下,因为存在并未输出同一时刻的推算位置的情况,所以需要包括时刻同步功能。在使绝对位置推算部11与相对位置推算部12的各输出的时刻同步之后,计算其差量。该差可以是将各推算位置的纬度和经度和高度的差的平方相加得到的欧几里得距离,也可以是以该时刻的行进方向为基准分别分为行进方向的前后成分和左右成分和高度成分的距离。
58.将这样计算出的距离输出至学习部15。
59.<学习部15>
60.学习部15基于用差运算部14计算出的差量,计算用于修正绝对位置推算部11的推算位置的修正量。例如,可以在行驶状态判断部13输出行驶状态的变化时机之后,将最初观测到标记、相对位置推算部12输出时的差运算部14输出的绝对位置推算部与相对位置推算部的差直接作为修正量。进而,可以保持该修正量,对位置修正部16持续输出同一修正量直到行驶状态判断部13下次输出行驶状态的变化时机。
61.<位置修正部16>
62.位置修正部16接受绝对位置推算部11、行驶状态判断部13和学习部15的输出,修正并输出绝对位置推算部11的推算位置。例如,行驶状态判断部13在判断为同一行驶状态持续的状态下,直接使用学习部15的修正量,输出对绝对位置推算部11的输出位置加上修正量而修正后的位置。另一方面,行驶状态判断部13在判断为行驶状态并非持续的状态下,使用使学习部15的修正量减少规定比例的值,输出对绝对位置推算部11的输出位置进行修正后的位置。另外,位置修正部16中,也输出修正结果的精度指标。
63.接着,对于本实施例的各部的处理内容,根据需要使用流程图进行说明。
64.<绝对位置推算部11的处理内容>
65.首先,作为涉及绝对位置推算部11中使用的车辆位置的检测的技术文献,已知日
本专利第6482720号公报。该公报中,公开了使用gnss接收机等进行车道级别精度的定位的定位装置(定位器装置)和定位方法。
66.在测量领域中,存在测量来自gnss接收机的定位信号的载波相位而进行的高精度的定位方式(载波相位定位方式)。该载波相位定位方式中,需要具有高精度的时钟的双频gnss接收机,成本高。另一方面,本车位置推算装置中进行的现有的编码定位方式能够使用廉价的单频gnss接收机进行。
67.但是,这样的gnss接收机的时钟的精度低(车载用的gnss接收机的情况下是1微秒程度),为了得到较高的定位精度,需要高精度地修正gnss接收机的时钟的偏置误差(接收机时钟偏置误差)。
68.为了解决该课题,日本专利第6482720号公报中,公开了能够高精度地修正gnss接收机的接收机时钟偏置误差引起的定位误差的定位装置。
69.本实施例的绝对位置推算部11中,通过使用这样的现有技术来推算绝对位置。
70.另外,绝对位置推算部11不仅输出定位位置,也输出使用来自哪个卫星的定位无线电波计算出了定位位置(定位使用卫星)、来自各卫星的无线电波强度等卫星信息。
71.<相对位置推算部12的处理内容>
72.接着,使用图3的流程图说明相对位置推算部12。图3所示的流程图在本车位置推算部10的本车位置推算动作中持续地执行。
73.在步骤s1中,相对位置推算部12判断是否存在作为求出本车的相对位置时的基准的标记和信标等。作为相对位置获取传感器1c的具体例的标记读取装置或c2x装置的可检测范围内存在标记或信标等时,相对位置推算部12能够推算本车的绝对位置,所以首先基于这些装置的输出,判断是否存在标记或信标等。具体而言,基准是图像标记(以qr码(注册商标)为代表的二维码)的情况下,标记读取装置能够检测到定位标志(finder pattern),进而在其对比度和大小在一定以上的情况下判断为存在标记,如果并非如此则判断为不存在标记。另外,基准是信标等的情况下,c2x装置判断是否能够检测到规定强度以上的特定频率的信号,能够检测到的情况下判断为存在信标等,如果并非如此则判断为不存在信标等。
74.在步骤s2中,相对位置推算部12计算与作为基准的标记和信标等的相对距离和相对方向。这是因为c2x装置或标记读取装置的可检测范围限定为一定程度的范围,所以为了提高位置识别的准确性,而计算与标记或信标等的距离。例如,基准是二维码的情况下,能够根据定位标志之间的时序图案的表象上的大小计算距离和相对方位。另外,基准是发出特定频率的信号的信标的情况下,通过检测多普勒频率的变化而能够检测通过信标正下方的瞬间,因为通常信标设置在与机动车行驶时c2x装置移动的平面不同的高度,所以通过考虑车速能够分为水平方向和高度方向的成分地计算距离。
75.或者,存在多个信标的情况下,能够分别观测各信标的频率变化,按三角测量的原理计算与各信标的相对关系。
76.在步骤s3中,相对位置推算部12读取从标记或信标等获取的信号中嵌入的标记或信标等的绝对位置信息。例如,在为二维码的情况下,可以在数据部中预先嵌入关于经纬度和方位等的信息、和用于检索未图示的数据库的索引信息,读取该信息。如果是信标等,则可以在其发送频率中叠加关于经纬度和方位等的信息、和用于检索未图示的数据库的索引
信息,对其进行解码。
77.在步骤s4中,相对位置推算部12计算本车的绝对位置,计算行驶方位,且计算对于计算出的绝对位置和行驶方位的可靠性指标。绝对位置和行驶方位通过对步骤s2中得到的与标记或信标等的相对关系和步骤s3中得到的标记或信标等的绝对位置以及设置方位使时刻对齐地综合而计算。关于可靠性指标,如果是二维码则定义为如果数据部与基于reed-solomon编码等的纠错编码部没有差异则可靠性高、通过纠错处理进行信息还原的比特数越多则可靠性越低的函数即可。对于信标等,也定义为数据部与校验和的差异数越大则可靠性越低的函数即可。或者,使用摄像机进行外界识别的情况下,基于黄昏或逆光等照明环境、高速行驶和急转弯引起的图像抖动等本车动作、观测对象的污损和磨损等对象状态,关于照明环境将对比度、关于本车动作将频率成分、关于对象状况将边缘的直线度分别设定为阈值范围,定义为不满足阈值范围的条件越多则可靠性越低的函数即可。可以将这样定义的函数的输出作为可靠性指标输出。
78.在步骤s5中,将相对位置推算部12中的计算结果输出至后端处理。输出内容包括本车的绝对位置、行驶方位、可靠性指标和观测它们的时刻信息中的1项以上。例如,本车位置推算部10搭载在车厢内,与其他设备通过can(car area network:车用局域网)连接的情况下,输出处理将上述输出内容重新封装为can输出用的分组并发送。
79.<行驶状态判断部13的处理内容>
80.接着说明行驶状态判断部13。行驶状态判断部13基于(1)转弯角度和车速等车辆信息、(2)卫星配置和可见卫星数等卫星信息的变化,计算行驶方位和平均车速的变化,判断是同一行驶状态持续还是行驶状态发生了变化。以下,具体说明行驶状态判断部13对于行驶状态变化的判断方法。
81.<左右转弯引起的行驶状态变化的判断方法>
82.行驶状态判断部13基于从车辆信息检测出的左右转弯,来判断行驶状态变化。具体而言,如下所述地判断在路口等进行左右转弯、进入或并入与之前所行驶的道路不同的道路。设想图4和图5的状况,使用来自上述车轴部的旋转角度传感器和舵角传感器或方向盘角度传感器的观测值,由此推算本车的行驶动作。
83.图4是车辆v向右转弯约90度时的示意图。由图中可知,车辆v在时刻t=t0~t2时直线前进,在时刻t=t3~t5时正在转弯,在时刻t=t6~t7时在转弯之后再次直线前进。
84.图5示出了此时的舵角和车辆v的转弯角度。通过使用以阿克曼(ackermann)模型为代表的车辆模型,将通常4轮的车辆v模型化为驱动轮和转向轮这2个轮,根据转向轮的舵角计算转弯半径,根据驱动轮的旋转量计算行进距离,由此能够计算转弯角度。如t3时刻一般,在一定时间内计算出阈值(thr1)以上的转弯角度的情况下,认为在路口等进行了左右转弯,进入或并入与之前所行驶的道路不同的道路,判断为与舵角开始变化之前的时刻(t2)相同的行驶环境不再持续。进而,舵角回到中立(t6),经过一定时间仍保持中立时,将舵角回到中立的时刻(t6)判断为行驶状态变化结束的时机。另外,此处的舵角中立,指的是在一定阈值(thr1)以下的状态。
85.在路口等进行左右转弯时,与位于本车左右的遮挡物的位置关系变化。例如,在周围高楼等建筑物密集的市区,在南北方向上行驶,是南北方向即本车的前后方向上不存在建筑物、在东西方向即本车的左右有建筑物排列的状况。此时,从位于东西方向的定位卫星
直接得到的定位无线电波被建筑物遮挡,即使能够接收定位无线电波,处于在高楼等上反射而发生多路径的状态的可能性也较高。发生多路径时,与直接接收到定位无线电波的情况相比,定位无线电波的传输距离延长,所以可以认为使用发生了多路径的定位无线电波进行本车位置定位时,在定位卫星所在的方位上偏差增大。上述状况的情况下,来自从本车看来南北方向上存在的定位卫星的定位无线电波难以发生多路径,来自东西方向上存在的定位卫星的定位无线电波易于发生多路径,所以易于成为在东西方向上具有偏差的结果。
86.接着,本车行驶方向因在路口左右转弯而变化时,相反地来自从本车看来东西方向上存在的定位卫星的定位无线电波难以发生多路径,来自南北方向上存在的定位卫星的定位无线电波易于发生多路径,所以易于成为在南北方向上具有偏差的结果。通过检测在路口等左右转弯,判断同一行驶环境不再持续,或者判断行驶状态变化结束的时机,能够切换这样的状况变化。
87.<车速变化引起的行驶状态变化的判断方法>
88.行驶状态判断部13基于从车辆信息检测出的车速,来判断行驶状态变化。具体而言,如下所述使用车速判别与之前所行驶的道路相比行驶环境发生了变化。
89.通常,在居住区等狭窄环境中限速被设定为30km/h程度的较低的车速,在具有单侧多车道的行驶道路的干线公路等中限速被设定为60km/h程度。因此,通过观测行驶中的平均车速的时序变化,能够判别行驶环境变化。具体而言,事先对于每个行驶环境,如图6所示地定义车速区间及其持续时间,在该车速区间中的行驶持续了该持续时间以上的情况下,判断为转移至该行驶状态。另外,因车速区间频繁地变动等而不适合任意条件的情况下,可以视为行驶状态是不明状态。
90.一般而言,在居住区等狭窄环境中,道路宽度较窄,并且人行道也较窄,所以建筑物接近机动车的行驶道路地存在的情况较多。在这样的环境下,周围的定位卫星易于被遮挡,并且用于定位的卫星的组合也易于频繁地切换,所以定位结果易于变得不稳定。另一方面,在干线公路上行驶车道宽度较宽,进而存在人行道,所以建筑物与机动车的行驶道路相距一定距离地存在的情况较多。在这样的环境下,与先前举出的狭窄环境相比更易于直接观测量位卫星,定位结果易于稳定。定位结果发生了从不稳定的状态向稳定的状态、或者相反的变化的情况下,判断为同一行驶环境不再持续,或者判断为行驶状态变化结束的时机,由此能够切换这样的状况变化。
91.<使用卫星的组合变化引起的行驶状态变化的判断方法>
92.行驶状态判断部13基于从卫星信息检测出的使用卫星的组合变化来判断行驶状态变化。卫星定位中,能够计算出3个卫星或4个卫星以上的伪距时,假定将中心设为各卫星位置且将半径设为伪距的球面,能够按该球面的交点计算观测地点的绝对位置。但是,一般计算出的伪距受到卫星轨道误差、电离层延迟误差、对流层延迟误差等各种误差的影响,所以球面的交点并非在1点相交。于是,大多计算与更多卫星的伪距,用最小二乘法等计算接近交点的点。因此,能够计算出伪距的卫星数偏向特定方位等情况下,用于定位的卫星配置有偏时,观测地点的绝对位置的误差中也产生偏向。于是,用于定位的卫星配置变化时,判断是同一行驶状态持续还是行驶状态发生了变化。
93.具体而言,从绝对位置推算部11输出的使用卫星信息与从一定时刻前(例如2秒前)到当前时刻前的状态相比,如果变化了一定数量以上(例如3个卫星以上)则输出行驶状
态发生了变化。另外,一定时刻之间使用卫星暂时变化并再次恢复为原本的使用卫星的情况下,输出行驶状态没有变化。
94.例如,在时刻t-2
时g1~g5这5个卫星、在时刻t-1
时g1~g4、g6这5个卫星、在时刻t0时g1~g4、g6、g7这6个卫星是定位卫星的情况下,判断为行驶状态发生了变化。另一方面,在时刻t-2
时g1~g5这5个卫星、在时刻t-1
时g1~g3这3个卫星、在时刻t0时g1~g5这5个卫星是定位卫星的情况下,判断为行驶状态没有变化。
95.<定位结果的精度变化引起的行驶状态变化的判断方法>
96.行驶状态判断部13基于从卫星信息检测出的定位结果的精度变化来判断行驶状态变化。卫星定位中,如上所述从多个定位卫星的伪距计算出观测地点的绝对位置时,能够基于观测矢量计算几何精度劣化率(gdop)、关于空间坐标的精度劣化率(pdop)等精度劣化率(dop:position dilution of precision)。这是基于天空中的定位卫星配置计算出的数值。另外,也存在基于用先前所述的最小二乘法计算绝对位置时的损失函数的值得到的指标、是3d定位还是2d定位等定位状态等而计算出的绝对位置的推算精度指标。另外,也可以输出gnss接收机制造商自有的精度指标(精度值),但本实施例中对此并不特别区分地使用。通过判断这些推算精度指标是稳定还是较大地变化等来判断是同一行驶状态持续还是行驶状态发生了变化。
97.具体而言,一定时间内(例如2秒中),pdop发生了阈值以上(例如1.0以上)的变化的情况下可以判断为行驶状态发生了变化。用于这些精度指标的阈值可以使用通过实验求出的固定值,也可以使用后述的通信部18接收适合该地区的阈值。对于其他推算精度指标也同样。
98.《差运算部14的处理内容》
99.接着,对于差运算部14进行说明。差运算部14中,要计算绝对位置推算部11与相对位置推算部12推算的本车位置的差量,但位置推算不一定在同一时刻实施,所以如下所述进行时刻同步之后运算两个位置推算部推算的本车位置的差量。
100.绝对位置推算部11中,绝对位置推算部11是gnss的接收装置的情况下,按0.1秒至1秒程度的固定间隔得到绝对位置。另一方面,相对位置推算部12中,按数秒至数分钟程度的不定间隔,得到标记或信标等的位置信息和与它们的相对位置。因此,差运算部14中,与相对位置推算部12的输出时机、或相对位置推算部12的输出内容中包括的观测到标记或信标等的时刻信息的时刻对齐地进行差的运算。
101.例如,差运算部14中,对于绝对位置推算部11的输出,使用线性插值变换为与相对位置推算部12的输出时机对齐的值来运算差。此处,将绝对位置推算部11在时刻t时推算出的本车位置定义为p(t),将相对位置推算部12在时刻s推算出的本车位置定义为q(s)。图7是示意性地表示p(t)和q(s)的推算时机的关系的图,将绝对位置推算部11推算p(tn)的时刻即时刻tn之后的、相对位置推算部12推算q(s)的时刻设为时刻sn。其中,n是整数,每当绝对位置推算部11进行位置推算时增加1。另外,将时刻sn前的时刻tn定义为时刻s
nb
,将时刻sn后的时刻t
n 1
定义为时刻s
na
。其中,b、a分别是表示before、after的下标。
102.该情况下,关于s1、s3的sb、sa如下所述。
103.[数学式1]
[0104]s0b
=t0,s
0a
=t1...(式1)
[0105]
[数学式2]
[0106]s3b
=t3,s
3a
=t4...(式2)
[0107]
此处,设:
[0108]
[数3]
[0109]
δs
0b
=s
0-s
0b
,δs
0a
=s
0a-s0...(式3)
[0110]
[数4]
[0111]
δs
3b
=s
3-s
3b
,δs
3a
=s
3a-s3...(式4)
[0112]
此时,能够使用线性插值对绝对位置推算部11的输出如下所述地计算与相对位置推算部12的输出时机对齐的值p(s0)、p(s3)。
[0113]
[数5]
[0114][0115]
[数6]
[0116][0117]
这样计算出基于绝对位置推算部11的输出得到的p(s0)和p(s3)之后,差运算部14计算与同一时刻的q(s0)和q(s3)的差。该差计算中,例如能够将各推算位置的纬度、经度和高度的差的平方相加得到的欧几里得距离及其欧拉角作为差矢量。差运算部14将该差矢量输出至学习部15。
[0118]
《差运算部14的处理内容的变形例》
[0119]
以上是使用线性插值将绝对位置推算部11的输出变换为与相对位置推算部12的输出时机对齐的值的例子,但差运算部14中,也可以使用更前和更后的点来进行二次插值、双三次插值等。由此,能够期待插值近似的精度提高、运算得到的差的精度提高的效果。
[0120]
另外,差运算部14中,相对位置推算部12的输出频度比绝对位置推算部11的输出频度更高的情况、以及间隔是数倍长程度而比较接近的情况下,也可以将相对位置推算部12的输出变换为与绝对位置推算部11的输出时机对齐的值。由此,能够与绝对位置推算部11的输出时机对齐地定期地进行差运算,能够期待学习部15和位置修正部16中的修正量更新的时机进一步提前的效果。
[0121]
进而,差运算部14中,作为使本车位置同步之后计算出的差矢量,也可以计算以此时的行进方向为基准分别分为行进方向的前后成分、左右成分和高度成分的矢量。由此,在位置修正部16中,能够分为本车的行进方向的前后方向和左右方向地精细地进行位置修正。
[0122]
<学习部15的处理内容>
[0123]
接着,对于学习部15进行说明。学习部15将用差运算部14计算出的差量蓄积为时
序数据,基于蓄积的时序数据,计算对于绝对位置推算部11的修正量。例如,最简单的方式是在差运算部14运算差量的时机实施学习,直接采用差量作为修正量的方式。该方式中,在相对位置推算部12的可靠性较高的情况下能够使用,设想相对位置推算部12能够识别的标记、发射器的识别误差充分小,与基于该识别结果得到的本车位置对齐地生成修正量。这样,通过以差运算部14输出运算结果的时机、即相对位置推算部12观测到标记和信标等的位置信息的时机为起点的运算,能够在检测位置信息之后迅速地确定对于绝对位置推算部11的修正量,所以具有能够在计算出最新的相对位置推算部12的结果之后迅速开始修正的效果。
[0124]
另外,学习部15也可以在行驶状态的变化完成时将学习状态重置,对于多次从标记或信标等得到的位置信息,基于该观测结果的统计量计算修正量。具体而言,从行驶状态判断部13接受行驶状态变化结束的时机的判断结果时,将直到该时刻的学习状态或修正量重置。进而,在多次接收了此后得到的差运算部14的输出之后,能够在其方差在阈值以下时基于最小二乘法将损失函数最小的值决定为修正量。或者也可以使用极大似然推算法。通过这样,能够除去外界识别结果的不稳定性,能够期待提高推算位置的可靠性的效果。
[0125]
进而,学习部15也可以使用相对位置推算部12的可靠性指标。如上所述,识别性能因使用纠错信息、照明环境、本车动作、对象状态而降低。因此,可以将这样的可靠性指标在阈值以下的来自标记或信标等的信息从学习数据中排除、或者并不重视地计算修正量。具体而言,如果是上述最小二乘法的情况,则通过在计算损失函数时对该数据点乘以小于1的系数并相加,能够减小可靠性指标小的数据点的影响,能够期待提高推算位置的可靠性的效果。
[0126]
<位置修正部16的处理内容>
[0127]
接着,使用图8的流程图说明位置修正部16。图8所示的流程图每当绝对位置推算部11输出本车位置时执行。位置修正部16接收绝对位置推算部11、行驶状态判断部13和学习部15的输出,输出修正后的推算位置和误差指标。
[0128]
在步骤s11中,位置修正部16基于行驶状态判断部13的输出,判断是否为同一行驶环境持续。行驶状态判断部13判断为同一行驶环境不再持续、行驶状态正在变化的情况下(分支的否一侧),因为用学习部15中的修正量修正并不适当,所以不使用修正量而是输出绝对位置推算部11的输出值(步骤s14)。另一方面,步骤s11中判断为同一行驶状态持续的情况下(分支的是一侧),前进至步骤s12。
[0129]
在步骤s12中,位置修正部16判断学习部15中的学习是否已完成。学习部15的学习尚未完成的情况下(分支的否一侧),因为用学习部15中的修正量修正并不适当,所以不使用修正量而是直接输出绝对位置推算部11的输出值(步骤s14)。另一方面,学习部15的学习已完成的情况或者仅用相对位置推算部12的1次输出结果决定修正量的情况下(分支的是一侧),前进至步骤s13。
[0130]
在步骤s13中,位置修正部16判断学习部15中的修正量与以前的修正量相比是否发生了阈值以上的变化。
[0131]
从学习部15输出的修正量与以前的时刻的修正量相比发生了阈值以上大小的变化的情况下(分支的是一侧),前进至步骤s15。在步骤s15中,位置修正部16为了使修正量变动缓和,对绝对位置推算量加上对上次修正量和本次修正量进行插值得到的修正量并输
出。具体而言,设直到上次从学习部15输出的修正量为δx(t-n)、δx(t-n 1)、
…
、δx(t-1),设本次从学习部15输出的修正量为δx(t)时,可以使用δc(n)δx(t-n) δc(n-1)δx(t-n 1)
…
δc(1)δx(t-1) δc(0)δx(t)作为本次的修正量。此处,设σδc(t)=1,t=t0~tn。
[0132]
另一方面,在步骤s13中,与以前的时刻的修正量相比没有阈值以上大小的变化的情况下(分支的否一侧),前进至步骤s16。步骤s16中,位置修正部16视为从学习部15得到了稳定的修正量,对来自绝对位置推算部11的结果加上来自学习部15的修正量并输出。
[0133]
另外,在步骤s14、s15、s16中,位置修正部16分别计算精度指标。例如,该精度指标例如是误差圆半径,步骤s14中直接输出绝对位置推算部11输出的精度指标即可。例如,在步骤s15中,设直到上次从绝对位置推算部11输出的精度指标为r(t-n)、r(t-n 1)、
…
、r(t-1),设本次从绝对位置推算部11输出的精度指标为r(t)时,将δc(n)δr(t-n) δc(n-1)δr(t-n 1)
…
δc(1)δr(t-1) δc(0)δr(t)作为本次的精度指标即可。另外,在步骤s16中,对相对位置推算部12的可靠性指标乘以适当的乘数变换为精度指标即可。
[0134]
来自上述位置修正部16的输出中,虽然存在相当于各种处理时间的延迟,但是与绝对位置推算部11的输出时机对齐地进行的。绝对位置推算部11例如以2hz程度定期地获取gnss等的定位信息,所以能够期待位置修正部16也以一定周期输出。自动驾驶系统中,需要随时获取本车正在哪里行驶,所以通过采用本实施例的结构,能够满足这样的自动驾驶系统的需求。
[0135]
如以上所说明,根据本实施例的车辆控制装置,通过与行驶环境和行驶状态相应地,学习定位位置的适当的修正量(偏移量),除去行驶状态变化的影响,即使行驶环境和行驶状态变化,也能够高频度地得到地图中的本车位置的高精度的推算。
[0136]
实施例2
[0137]
接着,说明本发明的实施例2的本车位置推算部10。另外,对于与实施例1的共通点省略重复说明。
[0138]
图9是说明本实施例的本车位置推算部10的框图。如此处所示,本车位置推算部10在绝对位置推算部11、相对位置推算部12、行驶状态判断部13、差运算部14、学习部15、位置修正部16之外,也具有学习控制部17、通信部18。另外,对于本实施例的行驶状态判断部13,也输入包括行驶路径信息的地图数据m
t
,对于本实施例的相对位置推算部12,也输入包括地标信息的地图数据m
l
。另外,本实施例的地图数据m
t
和地图数据m
l
是图1的地图数据m的一部分。以下,以本实施例的特征为中心,说明各部的详情。
[0139]
<绝对位置推算部11>
[0140]
绝对位置推算部11与实施例1同样,所以省略说明。
[0141]
<相对位置推算部12>
[0142]
相对位置推算部12使用外界识别传感器或c2x装置或标记读取装置,高精度地推算本车的位置。外界识别传感器、c2x装置、标记读取装置得到以本车的行驶环境中存在的地标、标记、发射器的绝对位置为基准的相对位置,所以也称为相对位置获取传感器1c。然后,相对位置推算部12中,根据以地标、标记、发射器的绝对位置为基准的本车的相对位置,计算并输出本车的绝对位置。对于此时使用的地标和标记、发射器的位置信息,可以检索并使用包括地标信息的地图数据m
l
中保存的信息,也可以如实施例1所记载地使用从标记或
发射器输出的位置信息。
[0143]
作为相对位置获取传感器1c的观测对象的地标与本车的距离较短,进而不产生衍射、反射引起的位置误差,所以与绝对位置推算部11中的位置推算结果相比,能够期待相对位置推算部12的位置推算结果精度更高。另一方面,相对位置推算部12对本车位置和姿态的推算仅在存在地标的场所或c2x通信成立的场所进行。因此,可以认为它在时间或空间的观点上是离散的。
[0144]
对于上述外界识别传感器进行说明。外界识别传感器例如指的是单镜头摄像机或立体摄像机、激光雷达(lidar)、毫米波、超声波传感器等测量设备。
[0145]
单镜头摄像机或立体摄像机是拍摄车辆v的外部状况的摄像设备。摄像机设置在车辆v的前窗玻璃的内侧和车辆v的后窗玻璃的内侧。摄像机也可以设置在车辆v的左右侧面,也可以设置在车室外的号牌上部等。摄像机将拍摄车辆v的前方和后方得到的拍摄图像发送至相对位置推算部12,进而立体摄像机将基于双眼视差得到的深度信息发送至相对位置推算部12。
[0146]
激光雷达、毫米波、超声波传感器是利用光、无线电波、声波等检测车辆v周边的障碍物的雷达传感器。雷达传感器对车辆v周边发射光、无线电波、声波等,接收在障碍物上反射的光、无线电波、声波等,由此检测有无障碍物和种类、速度、距离等障碍物信息,将该障碍物信息发送至相对位置推算部12。此处所谓障碍物包括护栏和标志支柱、建筑物等结构物、和行人、自行车、其他车辆等移动障碍物。
[0147]
对于包括地标信息的地图数据m
l
进行说明。该地图数据m
l
包括能够用外界识别传感器识别的地上物体的种类和配置。例如,对于摄像机而言,有作为行驶道路分隔线的白线或黄线等直线或虚线、表示限制通行的斜线、表示交通规则和限制的限速标线和车辆种类标线、停车线、人行横道、作为行驶时进入视野的立体物的护栏、信号灯、标志、路牌、看板、店铺和高楼的外观等。另外,对于激光雷达、毫米波、超声波传感器而言,有护栏和反光路标、窨井盖、标志支柱等。
[0148]
接着,对于包括行驶路径信息的地图数据m
t
进行说明。该地图数据m
t
包括道路信息和结构物信息、地理地形信息、路径信息。道路信息指的是道路的地点信息(节点信息)和各地点信息的连接信息(链接信息)、以及道路的车道数、道路宽度、速度限制信息、有无路肩和路肩宽度、有无人行道和人行道宽度等。结构物信息指的是高楼和住宅、人行天桥等建筑物的宽度和高度、与道路的相对关系、有无在道路侧方设置的隔音墙或防风墙和墙的高度、对于隧道和防落石用顶部的内外状态、包括桥梁和高架道路的周围的立体的道路信息等。地理地形信息指的是居住区、商业区、农田、林地等各地点的土地使用状况、和包括道路和土地的起伏信息的地形信息等。路径信息可以是用路径生成部50生成的行驶路线,或者在公交车等在决定的路线上行驶的移动体的情况下事先作为固定的行驶路线生成。
[0149]
<行驶状态判断部13>
[0150]
因为gnss的偏差倾向因(1)转弯角度和车速等车辆信息、(2)卫星配置和可见卫星数等卫星信息、(3)包括地形和周围建筑物等立体物环境的地图信息等变化而变动,所以行驶状态判断部13具有判断同一行驶环境持续的功能、判断行驶状态变化的时机的功能中的任一者或两者。关于车辆信息和接收环境,将各参数值蓄积为时序信息,在规定的参数值变化的情况、各自在一定时间中的变化量超过了规定阈值的情况、参数的变化量的累计超过
了一定值等情况下判断为行驶状态发生了变化。另外,行驶状态判断部13将该输出结果发送至学习控制部17。
[0151]
<学习控制部17>
[0152]
学习控制部17对学习部15的学习状态的初始化、学习内容的更新、学习频度等进行控制,具体而言,蓄积行驶状态判断部13的结果,基于其时序信息对于学习部15输出学习指示。例如,根据在郊外的高速公路上长时间行驶的情况和反复左右转弯地在市区的狭窄道路上行驶的情况,改变学习部15的动作,由此能够期待性能提高。
[0153]
在郊外的高速公路上长时间行驶的情况下,行驶状态相同的环境持续,能够期待多次进行相对位置推算部12的高精度的位置推算,所以可以对学习部15输出使用差运算部14的一定时间内得到的多次结果输出众数的学习指示。
[0154]
另一方面,反复左右转弯地相反地在市区的狭窄道路上行驶的情况下,行驶状态在短时间内切换,所以可以对学习部15输出在左右转弯等这样行驶状态判断部13输出行驶状态的变化时机之后、将最初观测到标记的、相对位置推算部12输出的时刻的差运算部14输出的绝对位置推算部与相对位置推算部的差直接输出的学习指示。
[0155]
<差运算部14>
[0156]
差运算部14与实施例1中记载的相同,所以省略说明。
[0157]
<学习部15>
[0158]
学习部15基于用差运算部14计算出的差量和从学习控制部17输出的学习指示,计算用于对绝对位置推算部11的推算位置进行修正的修正量。例如,作为来自学习控制部17的学习指示,输出了使用一定时间内得到的多次结果输出众数的学习指示的情况下,蓄积一定时间内的差量,输出其众数。另外,也可以基于得到来自差运算部14的差信息之后的时间、绝对位置推算部11的推算误差量、相对位置推算部12的推算误差量,输出学习部15输出的修正量的可靠性指标。
[0159]
<位置修正部16、通信部18>
[0160]
位置修正部16接收绝对位置推算部11、行驶状态判断部13和学习部15的输出,修正并输出绝对位置推算部11的推算位置,并且与通信部18之间双向地输入输出信息。例如,行驶状态判断部13在判断为同一行驶状态持续的状态下,直接使用学习部15的修正量,输出对绝对位置推算部11的输出位置加上修正量而修正后的位置。另一方面,行驶状态判断部13在判断为行驶状态并非持续的状态下,使用使学习部15的修正量减少规定比例的值,输出对绝对位置推算部11的输出位置进行修正后的位置,并且对通信部18在该输出位置和学习量之外,也发送日期时间、本车的车辆种类信息等。另外,经由通信部18从车外接收了修正信息的情况下,也可以基于从学习部15得到的修正量的可靠性指标,来判断使用来自通信部18的修正信息和来自学习部15的修正信息中的哪一者。
[0161]
对于上述与通信部18之间的输入输出进行说明。通信部对于未图示的服务器,发送来自位置修正部16的输出位置和学习量,以及日期时间、本车的车辆种类信息、来自学习部15的可靠性指标、来自绝对位置推算部11的本车位置等信息。
[0162]
未图示的服务器中的处理与本发明并不直接相关,所以此处避免详细记载,但例如蓄积从应用了本发明的多个车辆发送的输出位置和学习量、日期时间、本车的车辆种类信息、学习的可靠性指标、本车位置等,对于能够根据日期时间推算的定位卫星配置、能够
根据车辆种类信息推算的定位传感器的天线高度、行驶地点等每个类型蓄积修正量,由此在特定车辆在特定卫星配置的环境下行驶时,能够推算某一日期时间在某一经纬度对于绝对位置传感器叠加了怎样的偏差。设想将这样的推算值发送至该日期时间正在该经纬度行驶的车辆的通信部18。
[0163]
这样,通信部18能够从未图示的服务器得到修正信息,能够将该修正信息发送至位置修正部16。
[0164]
接着,对于本实施例的各部的处理内容,根据需要使用流程图进行说明。
[0165]
<绝对位置推算部11的处理内容>
[0166]
绝对位置推算部11不仅输出定位位置,也输出使用来自哪个卫星的定位无线电波计算出了定位位置(定位使用卫星)、来自各卫星的无线电波强度等卫星信息。处理的详情与实施例1中记载的相同,所以省略。
[0167]
<相对位置推算部12的处理内容>
[0168]
对于相对位置推算部12的处理内容,使用图10的流程图进行说明。图10所示的流程图在本车位置推算部10的本车位置推算动作中持续地执行。
[0169]
在步骤s1a中,相对位置推算部12判断是否存在作为求出本车的相对位置时的基准的地标、标记、信标等。作为相对位置获取传感器1c的具体例的外界识别传感器、标记读取装置、c2x装置等的可检测范围内存在地标、标记、信标等时,相对位置推算部12能够推算本车的绝对位置,所以首先基于这些装置的输出,判断是否存在地标或标记、信标等。
[0170]
关于基准是标记或信标的情况,因为在实施例1中已说明所以省略,此处对于使用地图数据m
l
和外界识别传感器识别地标的方法详细进行说明。例如,对于使用作为外界识别传感器的具体例的摄像机来识别人行横道标线的用例进行说明。人行横道标线是主要在路口等以横穿车辆行驶道路的方式将宽度0.6m的白线隔开0.6m间隔地排列3条以上的周期性的图案的路面标线。
[0171]
地图数据m
l
中,保存了对于路口的人行横道标线的白线的长度、端点和白线角度等相对关系、白线条数、有无侧线等,基于绝对位置推算部11推算出的本车位置来将本车周围的地标信息输入至相对位置推算部12。具体而言,从绝对位置推算部11得到因为尚未修正所以含有误差的本车位置和本车行进方位、本车速度。因此,考虑将本车行进方位作为矢量的方向、对本车速度乘以时间t作为矢量的长度的移动矢量,将其与当前的本车位置相加,由此能够计算经过时间t后的本车位置。本车位置与经过时间t后的本车位置之间、和对于该区间进而考虑一定范围的余量区域,将该区域中包括的地标信息以与本车的距离从近到远的顺序输出,由此能够将本车前进路线上的地标按出现的顺序输出至相对位置推算部12。
[0172]
从地图数据m
l
接受本车前进路线上存在的人行横道标线的地标信息时,在步骤s1a中进行从摄像机检测人行横道标线。使用图11的示意图说明该人行横道标线检测。d1是从摄像机输入的加工前的图像。在步骤s1a中为了检测人行横道标线而对于输入图像进行纵向边缘检测得到d2。之后,从d2中进行现有技术的标记等而提取线段要素,得到端点坐标和长度。将该线段要素中的具有阈值以内的类似长度的线段要素分组之后,对于每个组提取具有一定间隔的端点坐标得到d3。另外,该间隔因为受到摄像机的镜头畸变的影响所以也可以在阈值以内变动。如上所述人行横道标线具有3条以上的周期性的白线要素,所以是
线段要素的上端、下端各6个以上的具有一定间隔的端点坐标组。
[0173]
进而,因为人行横道标线存在于行驶道路上,所以考虑摄像机对于机动车车体的设置角度和设置高度、视野角时,能够推算图像中的消失点或地平线的高度,能够按路面上存在的线圈要素提取d4。提取出这样的端点坐标组的情况下,判断为成功识别出人行横道标线。
[0174]
另外,地标是最高限速标志等标志的情况下,因为规定了形状和文字等,所以事先准备与标志种类对应的模板图像,通过与摄像机影像对照而判断其是否存在。具体而言,考虑表象上的尺寸因距离而变动,使用将放大缩小为多个尺寸的模板图像与从摄像机输入的图像的一部分顺次偏移地叠加并求取相关性,判断为在相关值达到阈值以上的场所存在检测对象的方法(模板匹配法)判断是否成功识别。也可以与上述人行横道标线同样,考虑摄像机对于机动车车体的设置角度、设置高度、视野角,限制在图像中检测标志的区域。
[0175]
进而,对于人行横道标线以外的路面标线和结构物,也公开了大量的现有技术,所以通过使用这些,能够判断是否存在对象。
[0176]
这样,在步骤s1a中判断是否存在地标或标记、信标等。存在的情况下(分支的是一侧),前进至下一步骤即步骤s2a。不存在的情况下(分支的否一侧),再次尝试检测是否存在地标或标记、信标等。
[0177]
在步骤s2a中,相对位置推算部12计算与作为基准的地标、标记、信标等的相对距离和相对方向。这是因为外界识别传感器、c2x装置、标记读取装置的可检测范围限定为一定程度的范围,所以为了提高位置识别的正确性而计算与地标或标记、信标等的距离。关于基准是标记或信标的情况,因为在实施例1中已记载所以省略,此处对于使用地图数据m
l
用外界识别传感器识别地标的方法进行说明。
[0178]
例如,对于使用摄像机识别人行横道标线的用例进行记载。假设上述步骤s1a的处理中,判断为存在地标,得到了作为人行横道标线提取出的线段要素的上端、下端各自的端点坐标组。使用摄像机对于机动车车体的设置角度、设置高度、视野角、镜头畸变,进而假定本车正下方的行驶道路路面至少直到人行横道标线是平坦的时,能够计算假定行驶道路上存在人行横道标线时的直到人行横道标线的距离。进而,通过计算端点坐标组的各端点的排列的角度,能够计算与人行横道标线相对的本车的角度。
[0179]
另外,本车正下方的行驶道路路面至少直到人行横道标线是平坦的这一假定不成立的情况下,例如是坡道或带有倾斜角的弯道时,通过从地图数据m
l
使用地标的大小信息,也能够计算直到地标的距离。例如对于人行横道的情况使用图12进行说明。
[0180]
如图12中举例示出,使用上端的点群组gru和下端的点群组grd的坐标时,能够计算直到人行横道标线的距离及其地面倾斜角。以下,为了方便,虽然点群组gr分别具有多个点,但将其重心点作为代表点。从任意点a到任意点群组gr的距离,指的是从点a到点群组gr的代表点的距离。端点坐标之间的距离如上所述在人行横道的规格上是0.6m,所以使用其在图像上观测到的大小和视野角等摄像机信息,能够分别计算从摄像机原点o到下端的点群组grd的距离和从摄像机原点o到上端的端点坐标组gru的距离。
[0181]
此处,如图13中举例示出,使摄像机原点o和投影平面s固定,决定从摄像机原点o通过投影平面s上的点ph、p
l
、距离确定的点ph'、p
l
'时,能够决定通过这2点的直线的倾斜,所以能够根据从摄像机原点o到下端的点群组grd的距离和从摄像机原点o到上端的端点坐
标组gru的距离推算路面的倾斜。
[0182]
在步骤s3a中,相对位置推算部12决定地标、标记或信标等的绝对位置信息。关于标记和信标,因为在实施例1中已记载所以省略,此处对于使用地图数据m
l
用外界识别传感器识别地标的方法进行说明。
[0183]
例如,作为基准的地标是人行横道的情况下,如图11的d1所示,对于四角的端点p1~p4,在地图数据m
l
中保存了纬度、经度、高度等位置信息、路面标线的设置方位、白线长度、白线条数、有无侧线等。步骤s2a中识别出的人行横道标线的识别结果的白线条数和有无侧线、设置方位等信息与地图数据m
l
中保存的信息一致的情况下,读取人行横道的四角的端点的经纬度并用作结果。
[0184]
在步骤s4中,相对位置推算部12计算本车的绝对位置,计算行驶方位,且计算对于计算出的绝对位置或行驶方位的可靠性指标。绝对位置和行驶方位通过对步骤s2a中得到的与地标、标记、信标等的相对关系、和步骤s3a中得到的地标、标记、信标等的绝对位置和设置方位使时刻对齐地综合而计算。关于可靠性指标,因为在实施例1中已记载所以省略。另外,标记识别用的摄像机和作为外界识别传感器的摄像机的可靠性指标能够按相同的原理定义。
[0185]
在步骤s5中,将相对位置推算部12中的计算结果输出至后端处理。输出内容包括本车的绝对位置、行驶方位、可靠性指标和观测它们的时刻信息中的1者以上。例如,本车位置推算部10搭载在车厢内,与其他设备通过can连接的情况下,输出处理将上述输出内容重新封装为can输出用的分组并发送。
[0186]
<外界识别传感器是激光雷达或毫米波的情况>
[0187]
以上说明了外界识别传感器是摄像机的例子,但除此以外的外界识别传感器也能够基本上同样地使用。例如,外界识别传感器使用激光雷达或毫米波的情况下,步骤s1a中的是否识别出地标的检测,能够分别视为扫描方向的反射强度的变化、即距离信息和材质信息的空间变化,将这样的变化模式事先记录在地图数据m
l
中,按与该记录的变化模式相比是否存在阈值以上的类似性定义。
[0188]
另外,步骤s2a中的与本车的相对关系,能够分别将能够用激光雷达或毫米波测量的距离信息定义为距离,将扫描方向的反射强度变化的偏置变化定义为角度。
[0189]
步骤s3a中的从地图数据m
l
读取地标与摄像机的情况相同。
[0190]
步骤s4中的绝对位置的计算方法与摄像机的情况相同,可靠性指标能够定义为激光雷达或毫米波的反射强度。激光雷达或毫米波的情况下,对车厢外发射激光或毫米波,测量其反射波,所以雨滴或污泥等附着而灵敏度降低时,测量的反射强度减小。另外,此时得到的测量数据因为不均匀地附着的雨滴或污泥而发生畸变,所以可以认为可靠性降低。
[0191]
如以上所说明,根据本实施例的车辆控制装置,通过利用地标信息或经由通信部从外部获取的信息,能够更高精度地推算车辆位置。
[0192]
实施例3
[0193]
接着,说明本发明的实施例3的本车位置推算部10。另外,对于与上述实施例的共通点省略重复说明。
[0194]
本实施例中,对于在相对位置推算部12中、在用外界识别传感器识别地标时考虑更详细的识别特性并反映至修正方法的方法进行叙述。
[0195]
本发明的实施例3在装置结构上与实施例2相同,本车位置推算部10具有绝对位置推算部11、相对位置推算部12、行驶状态判断部13、差运算部14、学习部15、位置修正部16,并且包括行驶路径信息的地图数据m
t
、包括地标信息的地图数据m
l
、学习控制部17、通信部18。上述相对位置推算部12、差运算部14、位置修正部16的内部处理不同。
[0196]
以下,对于与实施例2重复的部分适当省略地,说明各部的详情。
[0197]
相对位置推算部12中的识别特性,是取决于识别对象的形状,在特定方向上能够精度良好地测量,但在其他方向上精度劣化或者完全不能识别位置。
[0198]
举出上述人行横道标线为例进行说明。通常,机动车行驶时,正交地通过人行横道标线。此时,点群组gr中包括的白线的端点是周期性的,不存在对白线之间进行区分的特征,所以多条白线排列的情况下难以区分。即,对于机动车的左右方向有多条白线排列的情况下难以区分,存在识别左右方向的位置时发生错误的可能性。另一方面,对于机动车的前后方向、即横穿进入人行横道标线的方向(与点群组gr的排列正交的方向),不存在这样的周期性,存在能够唯一识别位置的特征。
[0199]
或者,以车道分隔线的白线为例时,通常,机动车行驶时,与车道分隔线的白线平行地行驶。此时,考虑使用白线与沥青等路面的边界进行定位时,对于机动车的左右方向易于识别位置,但对于机动车的前后方向因为白线连续所以不能识别位置。
[0200]
因为存在这样取决于识别对象的形状、在特定方向上易于进行位置修正的特征,所以可以对于人行横道仅有前后方向(纵方向)、对于白线仅有左右方向(横方向)、对于最高限速标线有前后方向和左右方向双方等这样基于规则地事先定义。
[0201]
或者,在地图数据m
l
的地标信息中,对于各地标保存每个方向的是否允许位置修正即可。由此,能够对如狭窄道路的人行横道一般、易于用外界识别传感器捕捉整体而难以发生左右方向的误差的情况,和如行人和车辆较多而易于发生部分遮挡的多车道道路的人行横道一般、用外界识别传感器只能捕捉一部分而易于发生左右方向的误差的情况区分地进行处理,具有易于得到与环境相应的位置信息的效果。
[0202]
相对位置推算部12中,关于对于每个地标预先定义的、相对于车辆行进方向的方向成分输出其位置。
[0203]
差运算部14中,对于绝对位置推算部11和相对位置推算部12的差,关于从相对位置推算部12输出的方向成分进行计算。具体而言,考虑在从绝对位置推算部11得到了本车正在向北行驶的状态,并且从相对位置推算部12关于在地图上在东西方向上设置的人行横道标线输出了南北方向成分的位置信息的状态。此时,作为本车的南北方向的位置差,计算绝对位置推算部11与相对位置推算部12的差,作为本车的东西方向的位置差,输出未计算差量。
[0204]
学习部15与实施例2相同,所以省略说明。
[0205]
位置修正部16中,基于从学习部15输出的每个方位的差量,对绝对位置推算部11的输出进行修正并输出。这样,能够在用外界识别传感器识别地标时考虑更详细的识别特性,并反映至修正方法。
[0206]
附图标记说明
[0207]
100
…
车辆控制装置,1a
…
车辆信息接收部,1b
…
绝对位置获取传感器,1c
…
相对位置获取传感器,1d
…
致动器,1e
…
hmi,10
…
本车位置推算部,11
…
绝对位置推算部,12
…
相对位置推算部,13
…
行驶状态判断部,14
…
差运算部,15
…
学习部,16
…
位置修正部,17
…
学习控制部,18
…
通信部,20
…
自主导航综合部,30
…
地图对照部,40
…
自动驾驶控制部,50
…
路径生成部,m、m
t
、m
l
…
地图数据。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。