1.本发明属于交通运输技术领域,特别涉及一种自平衡式物流平台及其控制方法。
背景技术:
2.近些年来,随着交通运输业的快速发展,物流平台越来越多地被应用到生活中,具有广阔的发展前景。由于物流平台的主要功能是运输货物,因此其行驶的平顺性格外重要。目前市面上出现了很多的自平衡式物流平台。
3.现有的自平衡式物流平台存在着多种问题。例如:转臂式方案可原地转向,但无减振装置,平台抗颠簸能力差,不能保证货物运输安全。拖臂式方案无法原地转向和横移,机动性差。并且,无论拖臂式方案还是转臂式方案,承载能力都很差。
技术实现要素:
4.本发明的目的是提供一种自平衡式物流平台,其通过扭杆弹簧和自平衡驱动机构实现悬架摆臂角度调整,能够实现物流平台的自平衡的功能,同时能抑制簧下质量负效应。
5.本发明还有一个目的是提供一种自平衡式物流平台的控制方法,其能够根据物流平台的不同姿态,调整下控制臂的摆角,使物流平台实现自平衡。
6.本发明提供的技术方案为:
7.一种自平衡式物流平台,包括:
8.轮毂电机,其安装在物流平台的车轮中,用于驱动车轮转动;
9.转向节,其与所述轮毂电机的定子固定连接,所述转向节具有间隔设置的上连接臂和下连接臂;
10.转向驱动机构,其动力输出端与所述上连接臂连接;
11.下控制臂,其一端与所述下连接臂通过球铰接头连接,另一端与车架通过转轴连接;
12.其中,所述下连接臂上沿竖直方向开设有连接孔,所述球铰接头的一端连接在所述连接孔中,另一端与所述下控制臂连接;所述转轴沿水平方向设置;
13.减振器,其下端连接在所述下控制臂上,上端与车架连接;
14.自平衡驱动机构;
15.扭杆弹簧,其一端与所述自平衡驱动机构的输出端连接,另一端固定连接有端面法兰;
16.其中,所述端面法兰与所述下控制臂的侧面固定连接;所述扭杆弹簧转动时能够带动下控制臂绕所述转轴摆动,使所述车轮上下移动。
17.优选的是,所述自平衡驱动机构包括:
18.减速机箱体,其固定安装在车架上;
19.自平衡电机,其为伺服电机,所述自平衡电机的壳体固定在所述减速机箱体上;
20.自平衡减速机构,其设置在所述减速机箱体中,所述自平衡减速机构的输入端与
所述自平衡电机的输出轴连接,所述自平衡减速机构的输出端与所述扭杆弹簧的一端连接。
21.优选的是,所述自平衡减速机构包括:
22.齿轮,其连接在所述自平衡电机的输出轴上;
23.齿扇,其一端具有传动齿,并且通过所述传动齿与所述齿轮啮合;另一端与所述扭杆弹簧连接。
24.优选的是,所述的自平衡式物流平台,还包括:
25.第一套筒,其匹配套设在所述扭杆弹簧的一端,并且通过定位销和所述扭杆弹簧之间轴向定位;
26.其中,所述齿扇的一端固定套接在所述第一套筒上;
27.第二套筒,其固定套接在所述扭杆弹簧的另一端;
28.其中,所述端面法兰固定套接在所述第二套筒上。
29.优选的是,所述转向驱动机构包括:转向电机和转向减速器;
30.其中,所述转向减速器的输入端与所述转向电机的输出端连接,所述转向减速器的输出端与所述上连接臂连接。
31.优选的是,所述的自平衡式物流平台,还包括:
32.姿态传感器,其安装在车架上,用于检测物流平台的姿态;
33.摆角传感器,其安装在所述下控制臂与所述车架之间,用于检测所述下控制臂的摆动角度;
34.ecu,其接收所述姿态传感器和所述摆角传感器采集的信息,并根据所述信息控制所述自平衡电机,使所述下控制臂摆动。
35.一种自平衡式物流平台的控制方法,用于控制所述的自平衡式物流平台,包括:
36.当物流平台左右两侧车架高度不同时,控制车架较高的一侧的自平衡驱动机构转动,使得其对应的下控制臂的摆角满足:
[0037][0038]
其中,h为物流平台在绝对平坦的道路上时,车架距离地面的高度;b为物流平台的轮距;α为物流平台左右两侧车架高度不同时,车架的倾斜角;a为物流平台左右两侧车架高度不同时,车架较高一侧的下控制臂摆角角度;e为当前调整角度的下控制臂对应的球铰接头的球心与转轴之间的距离在水平面上的投影长度。
[0039]
优选的是,所述的自平衡式物流平台的控制方法,还包括:
[0040]
当物流平台前后两端车架高度不同时,控制车架较高一端的自平衡驱动机构转动,使得其对应的下控制臂的摆角满足:
[0041][0042]
其中,h为物流平台在绝对平坦的道路上时,车架距离地面的高度;l为物流平台的轴距;β为物流平台前后两端车架高度不同时,车架的倾斜角;b为物流平台前后两端车架高度不同时,车架较高一端的下控制臂摆角角度;e为当前调整角度的下控制臂对应的球铰接头的球心与转轴之间的距离在水平面上的投影长度。
[0043]
优选的是,所述的自平衡式物流平台的控制方法,还包括:
[0044]
当物流平台有一个车轮高度和其他车轮高度不同时,控制高度不同的一个车轮对应的自平衡驱动机构转动,使得其对应的下控制臂的摆角满足:
[0045][0046]
其中,h为物流平台在绝对平坦的道路上时,车架距离地面的高度;b为物流平台的轮距;l为物流平台的轴距;γ为物流平台有一个车轮高度不同时,车架的斜对向的倾斜角;e为当前调整角度的下控制臂对应的球铰接头的球心与转轴之间的距离在水平面上的投影长度。
[0047]
优选的是,所述的自平衡式物流平台的控制方法,还包括:
[0048]
当物流平台斜对向的两个轮胎高度不同时,控制车轮高度较高的车轮对应的自平衡驱动机构转动,使得其对应的下控制臂的摆角满足:
[0049][0050]
并且控制车轮高度较低的车轮对应的自平衡驱动机构转动,使得其对应的下控制臂的摆角满足:
[0051][0052]
其中,h为物流平台在绝对平坦的道路上时,车架距离地面的高度;b为物流平台的轮距;l为物流平台的轴距;δ为物流平台对向车轮高度不同时,车架的斜对向的倾斜角;e为当前调整角度的下控制臂对应的球铰接头的球心与转轴之间的距离在水平面上的投影长度。
[0053]
本发明的有益效果是:
[0054]
本发明提供的自平衡式物流平台,通过扭杆弹簧和自平衡驱动机构实现悬架摆臂角度调整,能够实现物流平台的自平衡的功能,同时能抑制簧下质量负效应。
[0055]
本发明提供的自平衡式物流平台,可任意方向自由移动:直线移动、斜向移动、原地调头、横向移动,具有较高的行驶速度和良好的机动性,能够满足不同的交通运输工况的需求。
[0056]
本发明提供的自平衡式物流平台的控制方法,其能够根据物流平台的不同姿态,调整下控制臂的摆角,使物流平台实现自平衡。
附图说明
[0057]
图1为本发明所述的自平衡式物流平台的总体结构示意图。
[0058]
图2为本发明所述的车轮及悬架系统的结构示意图。
[0059]
图3为本发明所述的自平衡系统的示意图。
[0060]
图4为本发明所述的自平衡减速机构的示意图。
[0061]
图5为本发明所述的自平衡系统与下控制臂连接结构的示意图。
[0062]
图6为本发明所述的自平衡式物流平台的控制方法的流程图。
具体实施方式
[0063]
下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
[0064]
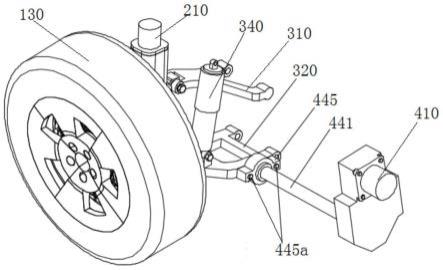
如图1-5所示,本发明提供了一种自平衡式物流平台,其主要包括储物舱110、车架120、车轮130、轮毂电机总成140、转向系统、悬架系统、自平衡系统、检测系统和制动系统。储物舱110用来容纳运输货物,通过螺纹连接的方式固定安装在车架120上;四个车轮130安装在车架120的下部。
[0065]
轮毂电机总成140和车轮130组成物流平台的行驶系统,轮毂电机总成与车轮130一一对应设置,所述轮毂电机总成安装在车轮130的轮辋内,通过轮毂电机驱动实现车轮130的旋转运动,进而实现自平衡式物流平台的行驶功能。其中,所述轮毂电机包括转子和定子。
[0066]
所述转向系统包括:转向电机210、转向减速器220、转向基座230和转向节240。转向节240安装在车轮轴线上,并且与所述轮毂电机的定子通过螺栓固定连接。转向节240具有间隔设置的上连接臂240a和下连接臂240b,上连接臂240a和下连接臂240b与转向节240的主体为一体式结构。转向电机210为车轮130的主销转向提供动力。转向减速器220与转向电机210相配合,接收转向电机210传递过来的动力,起到减速增扭的效果。其中,转向减速器220的动力输出轴与转向节240的上连接臂240a通过键配合连接;转向基座230与转向减速器220的壳体固联成一体。转向电机210输出动力,经由转向减速器220,将动力传递至转向节240,进而驱动车轮130实现主销转向的功能,通过调整车轮130与车架120的主销转向角度,实现自平衡式物流平台的斜向行驶、横向行驶等功能。
[0067]
所述悬架系统包括:上控制臂310、下控制臂320、球铰接头330和减振器340。上控制臂320的一端与转向基座230铰接,另一端与车架120铰接。下控制臂320的一端与转向节240的下连接臂240b通过球铰接头330相连接,另一端与车架120通过转轴转动连接,所述转轴的轴线沿水平方向设置。其中,转向节240的下连接臂240b上开设有连接孔,所述连接孔沿竖直方向设置,球铰接头330的一端固定连接在所述连接孔中,另一端与下控制臂320连接。下控制臂320上设置有减振器基座321,减振器340的下端与减振器基座321铰接,上端与车架120通过螺栓固定连接。
[0068]
如图3-5所示,所述自平衡系统包括:自平衡电机410、自平衡减速机构420和扭杆弹簧总成。自平衡电机410和自平衡减速机构420组成自平衡驱动机构。自平衡电机410作为调整下控制臂320角度的动力源,自平衡减速机构420设置减速机箱体430中,自平衡减速机构420的输入端与自平衡电机410的输出轴连接,自平衡减速机构420的输出端与所述扭杆弹簧总成的一端连接。
[0069]
在本实施例中,自平衡电机410采用伺服电机,自平衡减速机构420包括:齿轮421和齿扇422。齿扇422的弧面端设置有传动齿,并通过所述传动齿与齿轮421啮合传动。齿轮421通过联轴器410a与自平衡电机410的输出端相连接,将动力传递至齿扇422;齿扇422接收齿轮421传递过来的动力,减速增扭;其中,齿扇422的轴心开设通孔422a。扭杆弹簧总成包括:扭杆弹簧441、定位销442、第一套筒443、第二套筒444和端面法兰445。第一套筒443的外圆端与齿扇422的通孔422a配合固定。扭杆弹簧441一端与第一套筒443的内圆端相配合,并且通过定位销442进行轴向定位;另一端与第二套筒443的内圆端配合固定;第二套筒444
的外圆端与端面法兰445的内孔配合固定。端面法兰445通过多个螺栓445a固定连接在与下控制臂320的侧面上。自平衡电机410产生的动力依次经齿轮421、齿扇422、扭杆弹簧441、端面法兰445传递至下控制臂320,使下控制臂320与端面法兰445同步转动(摆动)。
[0070]
当物流平台遇到颠簸路面时,扭杆弹簧可以吸收振动产生的能量,同时,通过自平衡电机驱动减速机构,进而驱动扭杆弹簧带动下控制臂旋转,实现对下控制臂摆角调整,进而实现物流平台的自平衡的功能。扭杆弹簧相较于常用的螺旋弹簧单位质量能够储存更多的能量,同时结构简单,占用的空间小,便于布置,不需要润滑。此外,车轮跳动时,自平衡电机能驱动扭杆弹簧带动下控制臂摆动能够抵消一部分车轮跳动的惯性,从而抑制簧下质量负效应,减少颠簸。
[0071]
所述检测系统包括:姿态传感器和摆角传感器;所述姿态传感器安装在车架上,用于监测平台姿态。所述摆角传感器安装在下控制臂与车架之间,用来监测下控制臂摆动的角度。
[0072]
所述制动系统由电子机械制动实现制动功能,包括:epb,其由电机驱动,将电机的旋转运动转化为直线运动,对制动盘进行夹紧,实现对车轮的减速制动。
[0073]
其中,所述自平衡式物流平台的转向系统、悬架系统、自平衡系统、检测系统和制动系统均与自平衡式物流平台的euc电联。
[0074]
本发明提供的自平衡式物流平台,能够任意方向自由移动:直线移动,斜向移动,原地调头,横向移动,具有较高的行驶速度和良好的机动性,满足不同的交通运输工况的需求。同时,物流平台具备自平衡功能:能够应对崎岖路面,保证货物不发生倾倒,还可以在低速时实现爬楼梯的功能。
[0075]
如图6所示,本发明还提供了一种自平衡式物流平台的控制方法,包括:
[0076]
1.当遇到颠簸路面时,当姿态传感器检测到物流平台左右两侧车架高度不同时,将信息传递至ecu,ecu对信息进行处理,对车架较高一侧的两个自平衡电机发出指令,自平衡电机开始驱动减速机构,进而驱动扭杆弹簧总成带动下控制臂进行旋转,使得下控制臂的摆角满足:
[0077][0078]
经调整后,车架左右两侧高度相同,物流平台实现自平衡的功能。
[0079]
2.当遇到颠簸路面时,当姿态传感器检测到物流平台前后两端车架高度不同时,将信息传递至ecu,ecu对信息进行处理,对车架较高一端的两个自平衡电机发出指令,自平衡电机开始驱动减速机构,进而驱动扭杆弹簧总成带动下控制臂进行旋转,使得下控制臂的摆角满足:
[0080][0081]
经调整后,车架前后两端高度相同,物流平台实现自平衡的功能。
[0082]
3.当遇到颠簸路面时,当姿态传感器检测到物流平台有一个车轮高度与其他三个车轮不同时,将信息传递至ecu,ecu对信息进行处理,对与其他三个车轮高度不同的车轮对应的自平衡电机发出指令,自平衡电机开始驱动减速机构,进而驱动扭杆弹簧总成带动下控制臂进行旋转,使得下控制臂的摆角满足:
[0083][0084]
经调整后,车架四个车轮高度相同,物流平台实现自平衡的功能。
[0085]
4.当遇到颠簸路面时,当姿态传感器检测到物流平台斜对向轮胎高度不同,且两个车轮的高度均与h不相同时,将信息传递至ecu,ecu对信息进行处理,对高度不同的两个车轮的自平衡电机发出指令,自平衡电机开始驱动减速机构,进而驱动扭杆弹簧总成带动下控制臂进行旋转,使得高度较高的车轮对应的下控制臂的摆角满足:
[0086]
同时,使高度较低的车轮对应的下控制臂的摆角满足:
[0087][0088]
经调整后,车架四个车轮高度相同,物流平台实现自平衡的功能。
[0089]
上述公式中,h为物流平台在绝对平坦的道路上时,车架距离地面的高度;b为物流平台的轮距;l为物流平台的轴距;α为物流平台左右两侧车架高度不同时,车架的倾斜角;a为物流平台左右两侧车架高度不同时,车架较高一侧的下控制臂摆角应该调整为的角度;e为当前调整角度的下控制臂对应的球铰接头的球心与转轴之间的距离在水平面上的投影长度;β为物流平台前后两端车架高度不同时,车架的倾斜角;b为物流平台前后两端车架高度不同时,车架较高一端的下控制臂摆角应该调整为的角度;γ为物流平台有一个车轮高度不同时,车架的斜对向的倾斜角(车架指向高度不同的一个车轮的方向的倾斜角);δ为物流平台对向车轮高度不同时,车架的斜对向的倾斜角(两个高度不同的车轮连线方向的倾斜角);d1为平台斜对向轮胎高度不同,且均与h不相同时,斜对向高度较高的车轮对应的下控制臂的摆角应调整为的角度;d2为物流平台斜对向轮胎高度不同,且均与h不相同时,斜对向高度较低的车轮对应的下控制臂的摆角应调整为的角度。
[0090]
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。