1.本发明涉及汽车四轮独立转向系统控制领域,主要涉及一种基于状态观测的四轮独立转向电动汽车转向控制方法。
背景技术:
2.四轮独立转向电动汽车通过控制各个车轮主动、独立地转向,可实现斜行、蟹行和原地转向等功能,低速时具有较好的机动性,高速时具有较优的操纵稳定性和安全性。由于车辆实际运行工况复杂、状态多变且驾驶员风格各异,对四轮独立转向控制的自适应性和鲁棒性提出了较高的要求,相关方面的研究也成为当前研究的热点。
3.为提高四轮独立转向电动汽车转向控制系统的鲁棒性,有研究人员将pid算法、线性规划、鲁棒控制、滑模控制、模糊控制、神经网络控制以及模型预测控制等应用于四轮独立转向系统的稳定性控制中。四轮独立转向系统属于典型的过驱动控制,系统模型的维度和复杂度的增加给控制律设计带来了更大的挑战。控制算法的设计需建立在对被控对象和应用场景深入理解的基础上,如何提高参数不确定性和外部扰动情况下系统的鲁棒性、如何通过优化算法结构和求解过程等手段降低在线计算量仍是其研究重点。
4.在控制系统设计中,很多控制器的设计是建立在被控系统的所有状态可直接获得的假定上的。电动汽车的四轮独立转向控制需要获得准确的车辆行驶状态作为输入,当前大部分车辆行驶状态能够通过车载传感器直接测量得到,如纵向加速度、侧向加速度、横摆角速度以及方向盘转角等,但是作为表征车辆稳定性的质心侧偏角却无法通过量产车上的传感器直接测量得到,虽然通过光学传感器或高精度gps/imu组合模块能够直接对汽车质心侧偏角进行测量,但是高昂的使用成本使得这些方案无法应用于量产车。尽管当前已经有很多研究方法用于质心侧偏角的观测,并且取得了一定的效果,但是由于汽车的高度非线性,实车信号通常存在明显的误差和噪声,容易导致观测结果出现误差和漂移,如何在实车环境下准确地获得质心侧偏角成为状态观测器设计的难点。
5.多智能体系统(multi-agent system)的目标是让若干个具备简单智能却便于管理控制的系统能通过相互协作实现复杂智能,在降低系统建模复杂性的同时,提高系统的鲁棒性、可靠性、灵活性。目前多智能体系统已在飞行器的编队、传感器网络、数据融合、多机械臂协同装备、并行计算、多机器人合作控制、交通车辆控制、网络的资源分配等领域广泛应用。同时根据清华大学李亮教授团队提出的全矢量控制(full vector control,fvc)汽车,本发明引入全矢量控制和多智能体思想,提出基于状态观测的四轮独立转向电动汽车转向控制方法,以提高部分理想状态未知情况下四轮独立转向车辆转向控制的稳定性。
技术实现要素:
6.为提高四轮独立转向电动汽车的主动安全性和横摆稳定性,针对四轮独立转向系统部分理想状态未知以及冗余系统的实时计算负担,本发明提出了基于状态观测的四轮独立转向电动汽车转向控制方法。
7.本发明解决技术问题所采取的技术方案如下:
8.基于状态观测的四轮独立转向电动汽车转向控制方法,其方法包括如下步骤:
9.步骤一、根据carsim汽车模型输出的汽车的实时运动状态信息,利用八自由度四输入车辆动力学模型获得四个车轮的实时横摆角速度和实时质心侧偏角;
10.步骤二、根据驾驶员给出的方向盘转角及carsim汽车模型输出的汽车实时纵向速度,通过八自由度四输入车辆动力学理想模型确定四个车轮侧向力单独作用时在质心处产生的理想横摆角速度;
11.步骤三、根据步骤二获得的四个车轮理想横摆角速度,利用基于多智能体的理想状态分布式估计模块,获得四个车轮侧向力单独作用时在质心处产生的理想横摆角速度估计值和理想质心侧偏角估计值;
12.步骤四、根据步骤一获得的四个车轮实时横摆角速度和实时质心侧偏角、步骤三获得的理想横摆角速度估计值和理想质心侧偏角估计值,以及汽车的实时运动状态信息,利用基于状态观测器的四轮独立转向汽车转向分布式控制模块求解出汽车的四个车轮转角;
13.步骤五、根据步骤四获得的四个车轮转角,利用carsim汽车模型实现四轮独立转向电动汽车转向的稳定性控制,并输出汽车的实时运动状态信息,包括实时纵向速度、实时横摆角速度、实时质心侧偏角和实时路面附着系数。
14.本发明的有益效果如下:
15.1)根据汽车动力学机理和几何学原理,建立了八自由度四输入车辆动力学理想模型和八自由度四输入车辆动力学模型,实现了模型降维。
16.2)将四个独立的车轮转向系统看做四个异构智能体,根据四个独立的车轮转向系统之间的通信和硬件连接,利用图论建立了四轮独立转向系统的拓扑结构。
17.3)提出基于多智能体的理想状态分布式估计方法,利用已知的四轮独立转向系统的横摆角速度渐进估计出转向系统部分未知的理想状态。
18.4)提出了基于状态观测器的四轮独立转向汽车转向分布式控制模块,实现整车实际横摆角速度和质心侧偏角对其理想值的跟随,提高了部分理想状态未知情况下四轮独立转向车辆转向控制的稳定性。
19.4)该方法对其他异构多智能体协同控制系统的分布式鲁棒控制提供了一种新的设计思路。
20.5)本发明的方法简单易于实现,适用面广,适宜广泛推广应用。
附图说明
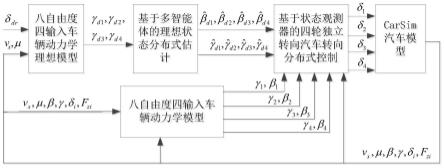
21.图1是本发明基于状态观测的四轮独立转向电动汽车转向控制方法的原理示意图。
22.图2是本发明四个独立转向智能体信息交换拓扑结构示意图。
具体实施方式
23.下面结合附图和具体实施例对本发明作进一步详细说明。
24.如图1所示,本发明基于状态观测的四轮独立转向电动汽车转向控制方法包括八
自由度四输入车辆动力学理想模型、八自由度四输入车辆动力学模型、基于多智能体的理想状态分布式估计模块、基于状态观测器的四轮独立转向汽车转向分布式控制模块以及carsim汽车模型。八自由度四输入车辆动力学理想模型用于确定四个车轮理想的横摆角速度;八自由度四输入车辆动力学模型用于确定四个车轮实时的横摆角速度和质心侧偏角;基于多智能体的理想状态分布式估计模块用于确定四个车轮理想的横摆角速度和质心侧偏角估计值。基于状态观测器的四轮独立转向汽车转向分布式控制模块用于求解出汽车的四个车轮转角;carsim汽车模型实现汽车的横摆稳定性控制,并输出汽车的实时运动状态信息,包括实时纵向速度、实时横摆角速度、实时质心侧偏角、实时路面附着系数、实时垂直载荷和实时车轮转角等。
25.如图2所示,本发明将四个独立的车轮转向系统看做四个异构智能体,根据四个车轮转向系统之间的通信和硬件连接,建立了四轮独立转向系统的拓扑结构,基于图论方法获得四个车轮转向智能体之间的连接权值。
26.本发明基于状态观测的四轮独立转向电动汽车转向控制方法具体实施步骤如下:
27.1.建立八自由度四输入车辆动力学模型
28.假设车辆纵向和横向速度基本相同,轮胎侧滑特性在线性范围内,忽略侧倾、俯仰和垂直运动后只考虑车辆的横向、纵向和偏航运动,忽略侧倾和悬架的动力学特性,根据牛顿定律,线性二自由度车辆动力学方程可以描述为:
[0029][0030]
式中,γ、β分别为四个车轮侧向力共同作用时,在整车质心处产生的横摆角速度和质心侧偏角。lf、lr分别为前/后轴到质心的距离。v
x
为实时纵向速度,m为整车质量。f
yi
(i=1,2,3,4)为第i个车轮侧向力。iz整车绕车辆坐标系z轴的转动惯量。
[0031]
令γi、βi分别为第i个车轮侧向力单独作用时,在整车质心处产生的横摆角速度和质心侧偏角,满足γ=γ1 γ2 γ3 γ4,β=β1 β2 β3 β4。令。令η1=lf,η2=lf,η3=-lr,η4=-lr。因此,可将线性二自由度汽车动力学方程(1)改写为如下形式:
[0032][0033]
当侧偏角较小时,根据unitire轮胎模型,第i个车轮侧向力可表示为:
[0034]fyi
=kiαiꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0035]
式中,ki(i=1,2,3,4)为第i个车轮轮胎的等效侧偏刚度。αi(i=1,2,3,4)为第i个车轮的侧偏角。
[0036]
根据平面运动学中的几何关系,车辆运动过程中的侧偏角αi(i=1,2,3,4)为:
[0037][0038]
式中,wi(i=1,2,3,4)为其他转向子系统对本系统的影响。δi(i=1,2,3,4)为第i个车轮转向角。
[0039]
w1=-(β2 β3 β4)-lf(γ2 γ3 γ4)/v
x
[0040]
w2=-(β1 β3 β4)-lf(γ1 γ3 γ4)/v
x
[0041]
w3=-(β2 β1 β4) lr(γ2 γ1 γ4)/v
x
[0042]
w4=-(β2 β3 β1) lr(γ2 γ3 γ1)/v
x
[0043]
假设式(4)中的β、γ已知,则将各个车轮的侧偏角(4)带入式(3)中,可求得四个车轮侧向力,然后将其带入线性二自由度汽车动力学方程(2),积分后可求得第i个车轮侧向力单独作用下,在整车质心处产生的横摆角速度γi和质心侧偏角βi。
[0044][0045]
将式(4)重写为如下形式:
[0046]
αi=δ
i-β
i-ηiγi/v
x
wi,i=1,2,3,4
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0047]
将式(6)带入式(3)中,可得:
[0048]fyi
=kiδ
i-kiβ
i-kiηiγi/v
x
kiwiꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0049]
根据式(2)、(7),可得单个车轮转向系统的状态方程:
[0050][0051]
可见,通过矢量变换,建立了以四轮转角为输入,以四个车轮力单独作用在质心处产生的质心侧偏角和横摆角速度为输出的八自由度四输入车辆模型(8)。
[0052]
2.建立八自由度四输入车辆动力学理想模型
[0053]
若将车辆看作一个全部质量集中在质心处的质点,那么质心的轨迹即为车辆的运动轨迹,质心侧偏角变化轨迹反映车辆行驶的稳定性,若对质心侧偏角加以控制,使其在车辆运动过程中趋于理想值零即β
*
=0,即汽车没有侧向滑动,那么车辆的稳定性也将得到提高。
[0054]
以前轮转向车辆二自由度动力学模型为基础,对车辆输入转角,稳态响应后,方向盘转角和理想横摆角速度转化为一阶惯性环节:
[0055]
[0056]
式中,γ
*
为理想的横摆角速度(rad/s);δf为方向盘的转角(rad);gr为稳定性因素(s2/m2),tr为横摆角速度的缓冲常数(s);kf、kr分别为前轮以及后轮的侧偏刚度(n/rad);l为轴距,l=lf lr。
[0057]
四轮独立转向电动汽车第i个车轮理想的侧向力为:
[0058]fyi*
=kiδ
i*-kiβ
*-kiηiγ
*
/v
x
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0059]
式中,δ
i*
根据阿克曼定理求得,β
*
为理想的质心侧偏角。
[0060]
根据式(2)、(10)建立理想的八自由度车辆动力学方程
[0061][0062]
式中:
[0063]w1*
=-(β
2*
β
3*
β
4*
)-lf(γ
2*
γ
3*
γ
4*
)/v
x
[0064]w2*
=-(β
1*
β
3*
β
4*
)-lf(γ
1*
γ
3*
γ
4*
)/v
x
[0065]w3*
=-(β
2*
β
1*
β
4*
) lr(γ
2*
γ
1*
γ
4*
)/v
x
[0066]w4*
=-(β
2*
β
3*
β
1*
) lr(γ
2*
γ
3*
γ
1*
)/v
x
[0067]
采用零质心侧偏角控制有因此可得
[0068][0069]
根据式(8)、(11)以及β
*
=0,求得第i个车轮侧向力在质心处产生的理想横摆角速度为:
[0070][0071]
为了解决第i个车轮力单独作用时,在质心处产生的理想质心侧偏角β
i*
未知问题,本发明利用理想横摆角速度γ
i*
(13),提出基于多智能体的状态观测器设计方法,对单个车轮转向系统理想的横摆角速度γ
i*
和质心侧偏角β
i*
进行估计。
[0072]
3.基于多智能体的理想状态分布式估计
[0073]
令令gi=bi,基于多智能体的理想状态观测器设计为如下形式:
[0074][0075]
式中,分别为理想横摆角速度γ
i*
和理想质心侧偏角β
i*
的估计值,v
βi
、v
ri
为第i个转向智能体理想状态观测器的控制策略。
[0076]
令则观测误差方程为:
[0077][0078]
利用已知的理想横摆角速度γ
i*
(13),提出观测器(14)的控制策略如下:
[0079][0080]
式中,α
1i
,α
2i
>0和m>0为设计参数。
[0081]
对于八自由度四输入车辆模型(8)及其理想模型(11),设计单个车轮基于多智能体的理想状态观测器(14),在观测器控制策略(16)的作用下,可实现单个车轮转向智能体理想质心侧偏角和横摆角速度的快速估计,进而实现整个四轮独立转向汽车转向控制系统所需的理想参数快速估计。
[0082]
4.基于状态观测器的四轮独立转向汽车转向分布式控制
[0083]
在车辆运动过程中,当车辆实际状态(8)趋于理想状态(11)时,可有效提高车辆的转向稳定性。
[0084]
定义δβi=β
i-β
i*
,δδi=δ
i-δ
i*
,δwi=w
i-w
i*
,根据式(8)、(11),可得第i个车轮转向系统横摆角速度、质心侧偏角与理想值的偏差方程为:
[0085][0086]
由四轮独立转向汽车的硬件连接结构和内部工作通讯,将每个车轮转向系统横摆角速度、质心侧偏角与期望值的偏差方程(17)看作一个独立的转向智能体。
[0087]
在所提出的四轮独立转向汽车转向控制系统理想状态观测器(14)及其控制策略(16)作用下,获得单个车轮力单独作用时在质心处产生的理想横摆角速度和理想质心侧偏角;然后针对偏差方程(17)提出基于部分理想状态观测的四轮独立转向汽车转向分布式控制策略(18),通过控制器的模型降维实现了整车实际横摆角速度和质心侧偏角对其理想值的快速跟随,有效提高了车辆的转向稳定性。
[0088][0089]
式中,τ
βi
和τ
γi
为控制器设计参数,满足:
[0090][0091]
其中,ri为控制器可设计的正定矩阵。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
