1.本发明涉及激光雷达技术领域,更具体地说,涉及一种激光材质识别方法、系统、激光雷达及雷达制品。
背景技术:
2.dtof是direct time of flight的简写,直译为直接飞行时间的意思,通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。距离d=c*t/2,c是光的速度,3*108米每秒,t是发出到接收到的时间间隔;
3.目前dtof测距方法一般有两种方法,一种是使用单个apd或者pd管作为接收器件,每次发射产生一次测距时间,第二种是使用spad阵列,由于spad可以使用cmos工艺制造,可以与tdc后端处理电路集成,是目前低成本dtof的主流方案,对于物体材质的识别其一般使用直方图峰值来做判断,但是由于spad阵列非常敏感,在近距离直方图上很难区分黑白、高反材质,难以满足扫地机厂家用黑白高反条纹来做回充座标示的期望,需要一种能够解决该问题的方式方法。
技术实现要素:
4.本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供激光材质识别方法,还提供了一种激光材质识别系统、一种激光雷达及一种雷达制品。
5.本发明解决其技术问题所采用的技术方案是:
6.构造一种激光材质识别方法,其中,包括以下步骤:
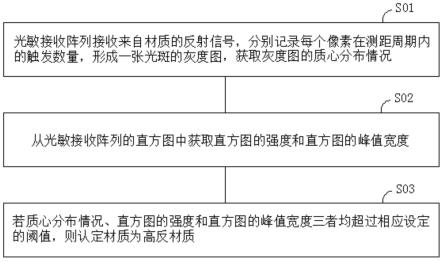
7.光敏接收阵列接收来自材质的反射信号,分别记录每个像素在测距周期内的触发数量,形成一张光斑的灰度图,获取灰度图的质心分布情况;
8.从光敏接收阵列的直方图中获取直方图的强度和直方图的峰值宽度;
9.若质心分布情况、直方图的强度和直方图的峰值宽度三者均超过相应设定的阈值,则认定材质为高反材质。
10.本发明所述的激光材质识别方法,其中,所述质心分布情况与设定的阈值比对方法为:
11.dtof模组的激光器向场景中发射脉冲波,spad或者其他光敏接收元件阵列从目标物体反射回来的脉冲波,其阵列上的单个单元会被概率触发,dtof会在单帧测量时间内发射和接收n次光信号,然后记录下n次飞行时间内每个单元被触发的次数,就可以形成一个连续的2维图像,其每个单元的值就是f(x,y),x表示的是该单元在阵列的x方向的位置,y表示的是该单元在阵列y方向的位置,使用这个2维图像,记图像中每一像素在x方向上坐标为:xi,对应的像素值加和为:pi,质心在x方向上坐标为:xo,则:
[0012][0013]
将二维图像中每一像素在y方向上坐标为:yj,对应的像素值为:pi,质心在y方向上坐标为:yo,则:
[0014][0015]
求出质心后,将该二位图像的值全部加和,与质心位置的值做除法,就可以知道质心的权重情况,得到质心权重值m:
[0016][0017]
m反映质心分布均匀情况,当m的值小于设定阈值则认为当前为多质心分布。
[0018]
本发明所述的激光材质识别方法,其中,所述直方图的获取方法为:
[0019]
tof模组的激光器向场景中发射脉冲波,spad或者其他光敏接收元件从目标物体反射回来的脉冲波;tdc能够记录每次接收到的光信号的飞行时间,也就是发射脉冲和接收脉冲之间的时间间隔,dtof模组会在单帧测量时间内发射和接收n次光信号,然后对记录的n次飞行时间做直方图统计f(n),其中出现频率最高的飞行时间t用来计算待测物体的距离。
[0020]
本发明所述的激光材质识别方法,其中,所述光敏接收阵列为spad阵列、sipm阵列或apd阵列。
[0021]
一种激光材质识别系统,其中,所述系统包括光敏接收阵列、比对处理单元和数据输出单元;
[0022]
所述光敏接收阵列,接收来自材质的反射信号,分别记录每个像素在测距周期内的触发数量,形成一张光斑的灰度图,获取灰度图的质心分布情况;还用于生成直方图;
[0023]
所述比对处理单元,接收灰度图的质心分布情况,并从光敏接收阵列的直方图中获取直方图的强度和直方图的峰值宽度;将质心分布情况、直方图的强度和直方图的峰值宽度三者与相应设定的阈值比对,若都超过阈值则认定材质为高反材质;
[0024]
所述数据输出单元,数据输出高反材质标记。
[0025]
本发明所述的激光材质识别系统,其中,所述比对处理单元进行质心分布情况与设定的阈值比对采用方式:
[0026]
dtof模组的激光器向场景中发射脉冲波,spad或者其他光敏接收元件阵列从目标物体反射回来的脉冲波,其阵列上的单个单元会被概率触发,dtof会在单帧测量时间内发射和接收n次光信号,然后记录下n次飞行时间内每个单元被触发的次数,就可以形成一个连续的2维图像,其每个单元的值就是f(x,y),x表示的是该单元在阵列的x方向的位置,y表示的是该单元在阵列y方向的位置,使用这个2维图像,记图像中每一像素在x方向上坐标
为:xi,对应的像素值加和为:pi,质心在x方向上坐标为:xo,则:
[0027][0028]
将二维图像中每一像素在y方向上坐标为:yj,对应的像素值为:pi,质心在y方向上坐标为:yo,则:
[0029][0030]
求出质心后,将该二位图像的值全部加和,与质心位置的值做除法,就可以知道质心的权重情况,得到质心权重值m:
[0031][0032]
m反映质心分布均匀情况,当m的值小于设定阈值则认为当前为多质心分布。
[0033]
本发明所述的激光材质识别系统,其中,所述光敏接收阵列生成直方图采用方式:
[0034]
tof模组的激光器向场景中发射脉冲波,spad或者其他光敏接收元件从目标物体反射回来的脉冲波;tdc能够记录每次接收到的光信号的飞行时间,也就是发射脉冲和接收脉冲之间的时间间隔,dtof模组会在单帧测量时间内发射和接收n次光信号,然后对记录的n次飞行时间做直方图统计f(n),其中出现频率最高的飞行时间t用来计算待测物体的距离。
[0035]
本发明所述的激光材质识别系统,其中,所述光敏接收阵列为spad阵列、sipm阵列或apd阵列。
[0036]
一种激光雷达,其中,所述激光雷达上设置有如上述的激光材质识别系统。
[0037]
一种雷达制品,其中,所述雷达制品上设置有如上述激光雷达。
[0038]
本发明的有益效果在于:本方案使用光敏接收阵列的灰度图和直方图两个信息来判断目标材质,当灰度图上出现多质心的图像和直方图峰值计数超过一定阈值时就判断目标物体是高反材质,再输出出来供后端做高反材质距离补偿和供扫地机做回充判别,能够很好的解决现有的光敏接收阵列在近距离直方图上很难区分黑白、高反材质,难以满足扫地机厂家用黑白高反条纹来做回充座标示的难题。
附图说明
[0039]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将结合附图及实施例对本发明作进一步说明,下面描述中的附图仅仅是本发明的部分实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图:
[0040]
图1是本发明较佳实施例的激光材质识别方法流程图;
[0041]
图2是本发明较佳实施例的激光材质识别方法原理框图;
[0042]
图3是本发明较佳实施例的激光材质识别方法普通材质灰度图;
[0043]
图4是本发明较佳实施例的激光材质识别方法高反材质灰度图;
[0044]
图5是本发明较佳实施例的激光材质识别方法直方图示意图;
[0045]
图6是本发明较佳实施例的激光材质识别方法高反材质示意图;
[0046]
图7是本发明较佳实施例的激光材质识别系统原理框图。
具体实施方式
[0047]
为了使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的部分实施例,而不是全部实施例。基于本发明的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明的保护范围。
[0048]
实施例一
[0049]
本发明较佳实施例的激光材质识别方法,如图1所示,同时参阅图2-6,包括以下步骤:
[0050]
s01:光敏接收阵列接收来自材质的反射信号,分别记录每个像素在测距周期内的触发数量,形成一张光斑的灰度图,获取灰度图的质心分布情况;
[0051]
s02:从光敏接收阵列的直方图中获取直方图的强度和直方图的峰值宽度;
[0052]
s03:若质心分布情况、直方图的强度和直方图的峰值宽度三者均超过相应设定的阈值,则认定材质为高反材质;
[0053]
本方案使用光敏接收阵列的灰度图和直方图两个信息来判断目标材质,由于高反射率的晶格材质的晶格单元颗粒周边反射率低于中心,所以当灰度图上出现多质心的图像和直方图峰值超过一定阈值时就判断目标物体是高反材质,再输出出来供后端做高反材质距离补偿和供扫地机做回充判别,能够很好的解决现有的光敏接收阵列在近距离直方图上很难区分黑白、高反材质,难以满足扫地机厂家用黑白高反条纹来做回充座标示的难题。
[0054]
本方案可用于准确识别高反材质以及黑白材质,其应用场景包括但不限于扫地机的回充识别、spad高反材料过爆距离补偿等;
[0055]
其中,质心分布情况与设定的阈值比对方法为:
[0056]
dtof模组的激光器向场景中发射脉冲波,spad或者其他光敏接收元件阵列从目标物体反射回来的脉冲波,其阵列上的单个单元会被概率触发,dtof会在单帧测量时间内发射和接收n次光信号,然后记录下n次飞行时间内每个单元被触发的次数,就可以形成一个连续的2维图像,其每个单元的值就是f(x,y),x表示的是该单元在阵列的x方向的位置,y表示的是该单元在阵列y方向的位置,使用这个2维图像,记图像中每一像素在x方向上坐标为:xi,对应的像素值加和为:pi,质心在x方向上坐标为:xo,则:
[0057][0058]
将二维图像中每一像素在y方向上坐标为:yj,对应的像素值为:pi,质心在y方向上坐标为:yo,则:
[0059][0060]
求出质心后,将该二位图像的值全部加和,与质心位置的值做除法,就可以知道质心的权重情况,得到质心权重值m:
[0061][0062]
m反映质心分布均匀情况,当m的值小于设定阈值则认为当前为多质心分布。
[0063]
直方图的获取方法为:
[0064]
tof模组的激光器向场景中发射脉冲波,spad或者其他光敏接收元件从目标物体反射回来的脉冲波;time digital converter(tdc)能够记录每次接收到的光信号的飞行时间,也就是发射脉冲和接收脉冲之间的时间间隔,dtof模组会在单帧测量时间内发射和接收n次光信号,然后对记录的n次飞行时间做直方图统计f(n),其中出现频率最高的飞行时间t用来计算待测物体的距离;
[0065]
直方图如图5所示,
[0066]
直方图的强度和直方图的峰值宽度比对方法为:
[0067]
直方图的数据是f(n),其中最大的峰值是f(nmax),将直方图数据全部加和与最大值相除就是峰值占比k:
[0068][0069]
就可以知道spad元件在最大值时刻被触发的比例,这个比例越大,说明光的瞬间强度越大,由于高反材质的反射很强,所以spad将在该时刻被大量触发,如图5上图是正常的直方图,直方图比较平滑,下图是高反材质,直方图陡峭,大量spad在同一个时间点被点亮,这个时候其最大的峰值是f(nmax)会很大,并且直方图波峰会窄(1-2个bin,bin为tdc测距最小分辨率),k值将会很大,而一般情况下的黑白材质峰值占比k在10-30%左右,高反材质峰值占比在70-90%,可以设置峰值占比m的阈值为50%,就可以使用k值来评估直方图的峰值和波峰宽度,超过阈值判断测距目标大概率为高反材质,再结合质心分布情况m值,最终判断测距目标的材质。
[0070]
较佳的,光敏接收阵列为spad阵列、sipm阵列、apd阵列等。
[0071]
实施例二
[0072]
一种激光材质识别系统,如图7所示,系统包括光敏接收阵列1、比对处理单元2和数据输出单元3;
[0073]
光敏接收阵列1,接收来自材质的反射信号,分别记录每个像素在测距周期内的触发数量,形成一张光斑的灰度图,获取灰度图的质心分布情况;还用于生成直方图;
[0074]
比对处理单元2,接收灰度图的质心分布情况,并从光敏接收阵列的直方图中获取直方图的强度和直方图的峰值宽度;将质心分布情况、直方图的强度和直方图的峰值宽度
三者与相应设定的阈值比对,若都超过阈值则认定材质为高反材质;
[0075]
数据输出单元3,数据输出高反材质标记;
[0076]
使用光敏接收阵列的灰度图和直方图两个信息来判断目标材质,当灰度图上出现多质心的图像和直方图峰值超过一定阈值时就判断目标物体是高反材质,再输出出来供后端做高反材质距离补偿和供扫地机做回充判别,能够很好的解决现有的光敏接收阵列在近距离直方图上很难区分黑白、高反材质,难以满足扫地机厂家用黑白高反条纹来做回充座标示的难题。
[0077]
本方案可用于准确识别高反材质以及黑白材质,其应用场景包括但不限于扫地机的回充识别、spad高反材料过爆距离补偿等。
[0078]
本发明中,比对处理单元进行质心分布情况与设定的阈值比对、光敏接收阵列生成直方图参见实施例一描述。
[0079]
优选的,光敏接收阵列1为spad阵列、sipm阵列、apd阵列等。
[0080]
实施例三
[0081]
一种激光雷达,其中,激光雷达上设置有如上述的激光材质识别系统。
[0082]
实施例四
[0083]
一种雷达制品,其中,雷达制品上设置有如上述激光雷达;本技术所指的雷达制品是应用有激光雷达的相关产品,例如扫地机、机器人等等
[0084]
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
