1.本发明涉及康复训练技术领域,具体而言,涉及一种神经内科用具有自适应调节结构的康复训练装置。
背景技术:
2.神经内科是关于神经方面的二级学科,是比较重要的学科,很多疾病都属于神经内科的范畴,包括临床比较常见的脑血管疾病、头痛、神经痛、癫痫、脑膜炎、痴呆、面神经炎等疾病。神经科疾病术后会伴随肢体活动困难的并发症,需要长期定时活动,促进肢体关节肌肉的活动缓慢康复,训练患者能够进行自主性活动,防止肌肉萎缩。
3.目前,多数医院都在病房中设置了用于帮助患者进行康复训练的各种设备,比如中国专利申请cn114344076a中提到的一种用于治疗神经内科的病患的康复装置,通过电动伸缩杆启动,使传动块带动滑竿连接的固定环套移动,固定环套带着固定筒套与转杆上的滑轨滑动,从而使固定筒套上的轮三和齿轮四发生变动,改变齿轮一和齿轮三、齿轮二与齿轮四的啮合状态,从而达到改变传动杆的转动速度,方便控制锻炼的速度,并由开关组实现病患对与电动伸缩杆的控制;在该技术方案中,训练的强度仅有两种,由于不同患者对于康复训练的强度都不一样,所以在该技术方案中提供的两种训练强度无法满足不同患者的训练需求,而且在该技术方案中,训练强度的调节还需要患者或者病患家属自行通过控制开关进行调节,如果病患家属对于患者的康复状况了解的不清楚,也会可能出现训练强度与患者的康复程度不相适应的情况,达不到理想的康复训练效果,而且如果调节的训练强度过大,也容易对患者造成二次伤害。
4.因此我们对此做出改进,提出一种神经内科用具有自适应调节结构的康复训练装置。
技术实现要素:
5.本发明的目的在于提供一种神经内科用具有自适应调节结构的康复训练装置,通过让患者用脚蹬动踏板进行康复训练,并在蹬动的过程中利用调节机构自动调节制动框与转动轮之间的距离,从而能够自动调节患者的训练强度,达到与患者的康复训练相适应的下肢训练强度。
6.为了实现上述发明目的,本发明提供了以下技术方案:
7.一种神经内科用具有自适应调节结构的康复训练装置,以改善上述问题。
8.本技术具体是这样的:
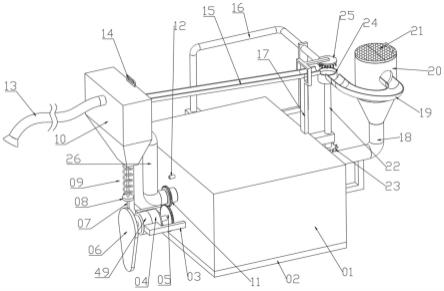
9.包括底座,所述底座顶部固定设有防护壳,所述防护壳内部设有转动轮,所述转动轮两侧均固定设有连杆,所述连杆远离转动轮的一端贯穿防护壳并延伸出防护壳外部,所述连杆与防护壳通过轴承活动连接,所述连杆一端设有踏板,所述踏板能够围绕连杆转动,所述连杆外端设有能够自动调节下肢康复训练强度的调节机构,让患者用脚蹬踏板转动能够对患者的下肢肌肉进行训练;
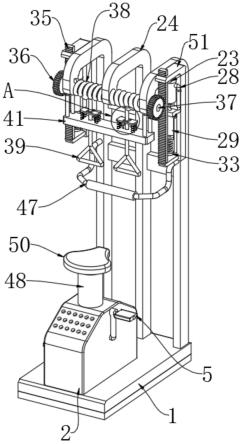
10.所述底座顶部后侧固定设有支架,所述支架上贯穿设有能够转动的第二转轴,所述第二转轴外端缠绕有两根用于训练患者上肢的拉绳,两根所述拉绳底端均固定设有拉环,所述拉环位于防护壳顶部,所述调节机构能够自动调节患者向下拉动拉绳的训练强度,通过让患者用双手拉动拉环向下移动能够对患者的上肢肌肉进行康复训练。
11.作为本技术优选的技术方案,所述防护壳顶部中间位置固定设有支撑杆,所述支撑杆内部螺纹连接有螺纹杆,所述螺纹杆顶端延伸出支撑杆顶部,所述支撑杆顶端固定设有座板,通过转动座板和支撑杆能够调节座板的高度,方便不同身高的患者利用本技术进行康复训练。
12.作为本技术优选的技术方案,所述调节机构包括安装在两个连杆外端的第一锥齿轮,所述第一锥齿轮后侧啮合有第二锥齿轮,所述第二锥齿轮后侧固定设有第一转轴,所述第一转轴外端固定设有扇叶,所述扇叶外端设有第一空心筒,所述第一转轴一端穿过第一空心筒并延伸入第一空心筒内部,所述第一转轴与第一空心筒通过轴承活动连接,所述第一空心筒底端固定连通有第一连通管,所述第一连通管一端固定连通有第二空心筒,所述第二空心筒内部设有第一橡胶塞,所述第一橡胶塞后侧固定设有第一推杆,所述第一推杆后端固定设有连接板,两个所述连接板的前端固定连接有同一个移动板,所述移动板后侧固定设有两个第一弹簧,两个所述第一弹簧一端固定连接有同一个制动框,所述制动框设在转动轮前侧,两个所述连接板与第一推杆相连接的一端分别在防护壳内部前侧和内部后侧滑动,通过调节该调节机构中的制动框与转动轮之间的距离,使得转动轮的外端与制动框接触,能够增强制动框与转动轮之间的摩擦力,进而能够增强患者下肢训练的强度。
13.作为本技术优选的技术方案,所述第一连通管靠近第一空心筒的一端前侧固定连通有第二连通管,所述第二连通管一端穿过防护壳并延伸出防护壳后侧,所述第二连通管一端固定连通有管道罩,所述管道罩顶部开设有多个与外界相连通的透气孔,所述第二连通管外端固定设有单向阀,能够方便第一空心筒中的部分气体通过第二连通管和管道罩流出。
14.作为本技术优选的技术方案,所述调节机构还包括安装在底座内部的两个第三连通管,两个所述第三连通管一端分别与两个第二连通管固定连通,所述第三连通管另一端贯穿底座和支架并延伸出支架外部,所述第三连通管另一端固定连通有短管,所述短管底端固定连通有第三空心筒,所述第三空心筒内部设有第二橡胶塞,所述第二橡胶塞底部固定设有第二弹簧,所述第二弹簧底端与第三空心筒内部底端固定连接,所述第三空心筒顶部一侧固定连通有第四连通管,所述第四连通管底端固定连通有第四空心筒,所述第四空心筒内部设有第三橡胶塞,所述第三橡胶塞底部固定设有第二推杆,所述第二推杆底端贯穿第四空心筒并延伸出第四空心筒底部,所述第二推杆底端固定设有第一推板,所述第一推板底部固定设有第五弹簧,所述第五弹簧底端固定设有第三弹簧,所述第三弹簧底部设有第二推板,所述第二推板顶端固定设有齿条,所述齿条前侧啮合有齿轮,两个所述齿轮分别固定设在第二转轴的两端,通过调节第五弹簧底端的第三弹簧与第二推板之间的距离能够增强上肢康复训练的强度。
15.作为本技术优选的技术方案,所述第四连通管外端固定设有第二电磁阀,所述第四空心筒顶部固定连通有泄气管,所述泄气管外端固定设有第三电磁阀,所述拉绳外端设有控制第一电磁阀、第二电磁阀的自动控制组件,所述第四空心筒底部固定设有控制第三
电磁阀的第二轻触开关。
16.作为本技术优选的技术方案,所述自动控制组件包括安装在拉绳上的多个等间距分布的橡胶球以及安装在支架底端的限位板,所述限位板顶部设有两个短板,两个拉绳分别贯穿两个短板,每个所述短板均限位板之间均固定设有多个第四弹簧和两个伸缩杆,每个所述短板底部均设有用于控制第一电磁阀、第二电磁阀的第一轻触开关,所述第一轻触开关能够延时自动关闭,通过利用第一轻触开关能够自动启动第一电磁阀、第二电磁阀和第三电磁阀。
17.作为本技术优选的技术方案,所述短板顶部中间位置固定设有四个弹性板,所述拉绳底端从四个弹性板之间穿过,弹性板具有弹性能够在拉绳外端的橡胶球作用下上下弯曲,并且能够在弯折之后自动复位,从而能够对橡胶球的位置进行限位。
18.作为本技术优选的技术方案,所述支架前侧固定设有把手,所述把手外端套有软套,所述把手位于座板顶部,设置的把手能够方便一些不用进行上肢训练的患者进行使用。
19.作为本技术优选的技术方案,所述支架两侧均固定设有支撑板,所述齿条顶端贯穿支撑板,所述第二推板后端在支撑板内部上下滑动,设置的支撑板能够对齿条和第二推板的位移进行限位。
20.与现有技术相比,本发明的有益效果:
21.在本技术的方案中:
22.1.通过让患者用脚蹬动踏板进行康复训练,并在蹬动的过程中利用调节机构自动调节制动框与转动轮之间的距离,制动框与转动轮接触使其能够对转动轮的转动进行阻止,以增强训练强度,而且不断挤压制动框,还能够不断调节该训练前度,以适应不同的患者,也能够适用于不同康复阶段的患者进行训练,也能够达到自动调节患者的训练强度的效果,并且使得该康复训练强度能够与患者自身的情况相适应;
23.2.本技术在患者能够将橡胶球拉动到限位板底部时能够自动利用调节机构中的第三连通管向短管、第三空心筒和第四空心筒中送气,以调节第五弹簧底端的第三弹簧与第二推板之间的距离,二者之间的距离越近患者上肢向下拉动拉环越费劲,说明患者的上肢训练强度越大,从而能够自动调节本技术中对患者上肢所进行的康复训练强度,避免造成训练强度与患者康复程度不一致的情况出现,从而能够达到理想的康复训练效果,也能够避免对患者造成二次伤害。
附图说明
24.图1为本技术提供的一种神经内科用具有自适应调节结构的康复训练装置的整体结构示意图;
25.图2为本技术提供的一种神经内科用具有自适应调节结构的康复训练装置的图1中a的放大图;
26.图3为本技术提供的一种神经内科用具有自适应调节结构的康复训练装置的图1的俯视图;
27.图4为本技术提供的一种神经内科用具有自适应调节结构的康复训练装置的图1的后视图;
28.图5为本技术提供的一种神经内科用具有自适应调节结构的康复训练装置的支架
和防护壳的剖视图;
29.图6为本技术提供的一种神经内科用具有自适应调节结构的康复训练装置的图5中b的放大图;
30.图7为本技术提供的一种神经内科用具有自适应调节结构的康复训练装置的图5中c的放大图;
31.图8为本技术提供的一种神经内科用具有自适应调节结构的康复训练装置的防护壳的内部结构示意图;
32.图9为本技术提供的一种神经内科用具有自适应调节结构的康复训练装置的第三空心筒和第四空心筒的剖视图;
33.图10为本技术提供的一种神经内科用具有自适应调节结构的康复训练装置的图9中d的放大图。
34.图中标示:
35.1、底座;2、防护壳;3、转动轮;4、连杆;5、踏板;6、第一锥齿轮;7、第二锥齿轮;8、第一转轴;9、扇叶;10、第一空心筒;11、第一连通管;12、第二空心筒;13、第一橡胶塞;14、第一推杆;15、连接板;16、移动板;17、第一弹簧;18、制动框;19、第二连通管;20、管道罩;21、单向阀;22、第三连通管;23、短管;24、支架;25、第三空心筒;26、第二橡胶塞;27、第二弹簧;28、第四连通管;29、第四空心筒;30、第三橡胶塞;31、第二推杆;32、第一推板;33、第三弹簧;34、第二推板;35、齿条;36、齿轮;37、第二转轴;38、拉绳;39、拉环;40、橡胶球;41、限位板;42、伸缩杆;43、第四弹簧;44、短板;45、弹性板;46、第一轻触开关;47、把手;48、支撑杆;49、螺纹杆;50、座板;51、支撑板;52、第一电磁阀;53、第二电磁阀;54、第五弹簧;55、泄气管;56、第三电磁阀;57、第二轻触开关。
具体实施方式
36.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图,对本发明实施例中的技术方案进行清楚、完整的描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。
37.因此,以下对本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的部分实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
38.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征和技术方案可以相互组合。
39.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
40.在本发明的描述中,需要说明的是,术语“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,或者是本领域技术人员惯常理解的方位或位置关系,这类术语仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
41.为了能够帮助神经内科的患者在进行康复治疗的过程中自动调节训练的强度,达到理想的训练效果,也为了避免对患者造成二次伤害,请参阅图1、图3、图4、图5、图9,本发明提供一种技术方案:一种神经内科用具有自适应调节结构的康复训练装置,包括底座1,底座1顶部固定设有防护壳2,防护壳2内部设有转动轮3,转动轮3两侧均固定设有连杆4,连杆4远离转动轮3的一端贯穿防护壳2并延伸出防护壳2外部,连杆4与防护壳2通过轴承活动连接,连杆4一端设有踏板5,踏板5能够围绕连杆4转动,连杆4外端设有能够自动调节康复训练强度的调节机构,在训练时,患者只需要用脚蹬动踏板5转动,并通过踏板5带动连杆4和转动轮3转动,从而能够达到对患者的下肢进行训练的效果;
42.下肢训练的过程中,患者随着训练的不断进行,其下肢的肌肉会逐渐恢复变得有力,从而能够更加快速的蹬动踏板5,所以此时需要增大下肢训练的强度,如图5、图6和图8所示,该调节机构包括安装在两个连杆4外端的第一锥齿轮6,第一锥齿轮6后侧啮合有第二锥齿轮7,第二锥齿轮7后侧固定设有第一转轴8,第一转轴8外端固定设有扇叶9,扇叶9外端设有第一空心筒10,第一转轴8一端穿过第一空心筒10并延伸入第一空心筒10内部,第一转轴8与第一空心筒10通过轴承活动连接,患者在蹬动踏板5的过程中会通过第一锥齿轮6和第二锥齿轮7带动第一转轴8和扇叶9转动,并使得扇叶9转动的过程中在第一空心筒10内部产生气体,随着患者蹬动的速度越快第一空心筒10内部产生的气体越多,为了能够方便该气体的排出,保证患者能够正常蹬动踏板5进行转动,第一空心筒10底端固定连通有第一连通管11,如图6和图8所示,第一连通管11靠近第一空心筒10的一端前侧固定连通有第二连通管19,第二连通管19一端穿过防护壳2并延伸出防护壳2后侧,第二连通管19一端固定连通有管道罩20,管道罩20顶部开设有多个与外界相连通的透气孔,第二连通管19外端固定设有单向阀21,本技术设置有最低的蹬动速度,在该速度下扇叶9在第一空心筒10内部产生的气体会通过第二连通管19和管道罩20排出,只有当患者蹬动的速度超过该初始速度时,才会利用调节机构自动增强患者的训练强度;
43.具体的,如图5和图8所示,第一连通管11一端固定连通有第二空心筒12,当患者蹬动的速度大于该初始速度时,扇叶9产生的气体除了通过第二连通管19排到外界之外,还能够进入第二空心筒12内部,而且,第二空心筒12内部设有第一橡胶塞13,所述第一橡胶塞13后侧固定设有第一推杆14,第一推杆14后端固定设有连接板15,两个连接板15的前端固定连接有同一个移动板16,移动板16后侧固定设有两个第一弹簧17,两个第一弹簧17一端固定连接有同一个制动框18,制动框18设在转动轮3前侧,两个连接板15与第一推杆14相连接的一端分别在防护壳2内部前侧和内部后侧滑动,随着患者的不断康复,其下肢量逐渐增强,从而能够更加快速的蹬动踏板5进行转动,也就是能够有更多的气体进入第二空心筒12内部,并且能够推动第一橡胶塞13向后移动,再通过第一橡胶塞13推动第一推杆14和连接板15移动,进而能够利用连接板15推动移动板16、第一弹簧17和制动框18向靠近转动轮3的一侧移动,使得转动轮3的外端与制动框18接触,也会对第一弹簧17进行压缩,从而会增加转动轮3转动时的摩擦力,自动提高患者下肢训练的强度,而且随着患者蹬动的速度越快,制动框18与转动轮3之间的距离越小,也就是转动轮3转动所受到的阻力越大,即下肢训练强度越大;
44.本技术能够根据患者自身的康复程度自动调节下肢训练的强度,使得本技术提供的训练强度能够与患者的身体状况相适应,避免训练强度过大对患者造成伤害。
45.进行了下肢训练之后,本技术还能够对患者的上肢进行训练,如图1、图3、图4、图5、图9所示,底座1顶部后侧固定设有支架24,支架24上贯穿设有能够转动的第二转轴37,第二转轴37外端缠绕有两根用于训练患者上肢的拉绳38,两根拉绳38底端均固定设有拉环39,拉环39位于防护壳2顶部,调节机构能够自动调节患者向下拉动拉绳38的训练强度,使用时,患者只需要用手拉动拉环39和拉绳38向下移动就能够达到对患者的上肢进行训练的目的;
46.在进行上肢训练的过程中,本技术也能够自动调节对患者的训练的强度,如图2、图5、图7、图8、图9、图10所示,该调节机构还包括安装在底座1内部的两个第三连通管22,两个第三连通管22一端分别与两个第二连通管19固定连通,患者在蹬动踏板5的过程中还会有部分气体进入第三连通管22,第三连通管22另一端贯穿底座1和支架24并延伸出支架24外部,第三连通管22另一端固定连通有短管23,短管23底端固定连通有第三空心筒25,第三空心筒25内部设有第二橡胶塞26,第二橡胶塞26底部固定设有第二弹簧27,第二弹簧27底端与第三空心筒25内部底端固定连接,第三空心筒25顶部一侧固定连通有第四连通管28,第四连通管28底端固定连通有第四空心筒29,第四空心筒29内部设有第三橡胶塞30,第三橡胶塞30底部固定设有第二推杆31,第二推杆31底端贯穿第四空心筒29并延伸出第四空心筒29底部,第二推杆31底端固定设有第一推板32,第一推板32底部固定设有第五弹簧54,第五弹簧54底端固定设有第三弹簧33,第三弹簧33底部设有第二推板34,第二推板34顶端固定设有齿条35,而且为了能够固定齿条35的移动方向,如图10所示,支架24两侧均固定设有支撑板51,齿条35顶端贯穿支撑板51,第二推板34后端在支撑板51内部上下滑动,齿条35前侧啮合有齿轮36,两个齿轮36分别固定设在第二转轴37的两端,患者在拉动向下拉动拉环39进行上肢训练的过程中会带动拉绳38的一端向下移动,由于拉绳38缠绕在第二转轴37上,所以拉绳38还会带动第二转轴37转动,并通过第二转轴37带动齿轮36转动,然后会通过齿轮36带动齿条35向上移动;
47.患者在蹬动踏板5的过程中还会有部分气体通过第三连通管22进入短管23内部,然后再通过短管23进入第三空心筒25内部,通过第四连通管28进入第四空心筒29内部,然后该气体会推动第三橡胶塞30向下移动,并带动第二推杆31和第一推板32、第五弹簧54和第三弹簧33向下移动,使得第三弹簧33底部与第二推板34顶部之间的距离之间逐渐缩短,而且此时患者向下拉动拉环39还会带动齿条35及安装在齿条35底部的第二推板34向上移动,此时第二推板34会向上挤压第五弹簧54,从而会增加其向上移动的阻力,也就是增强患者向下拉动拉环39的阻力,从而能够调节该上肢训练强度;
48.而且,为了能够自动控制气体通过第四连通管28,如图7和图10所示,第四连通管28外端固定设有第二电磁阀53,第四空心筒29顶部固定连通有泄气管55,泄气管55外端固定设有第三电磁阀56,拉绳38外端设有控制第一电磁阀52、第二电磁阀53的自动控制组件,所述第四空心筒29底部固定设有控制第三电磁阀56的第二轻触开关57,具体的,如图2所示,该自动控制组件包括安装在拉绳38上的多个等间距分布的橡胶球40以及安装在支架24底端的限位板41,限位板41顶部设有两个短板44,短板44顶部中间位置固定设有四个弹性板45,拉绳38底端从四个弹性板45之间穿过,两个拉绳38分别贯穿两个短板44,每个短板44均限位板41之间均固定设有多个第四弹簧43和两个伸缩杆42,每个短板44底部均设有用于控制第一电磁阀52、第二电磁阀53的第一轻触开关46,第一轻触开关46能够延时自动关闭;
49.随着患者上肢力量的逐渐恢复,其向下拉动拉环39和拉绳38的距离会越长,所以当拉绳38外端的橡胶球40会逐个穿过短板44和限位板41,由于短板44内部安装有弹性板45能够对橡胶球40的向下移动起到短暂的限制作用,此时弹性板45会向下弯折变形,并在弹性板45的限制下橡胶球40会带动短板44向下移动直至与第一轻触开关46接触,然后第一轻触开关46会自动开启第一电磁阀52、第二电磁阀53,然后脚蹬过程中产生的气体才会通过第三连通管22进入到第三空心筒25和第四空心筒29内部,而且,此时橡胶球40会穿过弹性板45移动到到短板44底部,然后一小段时间后第一轻触开关46也会自动关闭,直至下一个橡胶球40再次启动第一轻触开关46,然后会使得第四空心筒29内部的第三橡胶塞30继续下移,也就是使得第五弹簧54和第三弹簧33下移,缩短第三弹簧33与第二推板34之间的距离,增强患者上肢下拉拉环39的阻力,从而能够自动调节上肢训练的强度,而且当患者不再向下拉伸拉环39时,压缩的第二弹簧27和第五弹簧54会进行复位推动第四空心筒29和第三空心筒25中的气体进入第三连通管22内部,并通过第二连通管19和管道罩20排出,而且复位后,第一推板32顶部会与第四空心筒29底部的第二轻触开关57接触,使得第三电磁阀56自动打开,也能够方便排气。
50.而且,为了能够方便患者进行上肢和下肢训练,如图1、图3、图4、图5、图9所示,防护壳2顶部中间位置固定设有支撑杆48,支撑杆48内部螺纹连接有螺纹杆49,螺纹杆49顶端延伸出支撑杆48顶部,支撑杆48顶端固定设有座板50,在训练时,患者只需要坐在座板50顶部,然后将脚蹬在踏板5上,再模拟骑自行车的动作即可对患者的腿部进行训练,为了能够方便不同身高的患者使用本技术,座板50的高度能够调节,使用时患者只需要转动座板50,利用座板50带动螺纹杆49转动即可向上移动座板50和螺纹杆49,从而能够达到调节座板50的高度的目的。
51.当患者只需要进行单独的下肢训练时,为了方便给患者的上肢提供支撑,如图1、图3、图4、图5和图9所示,支架24前侧固定设有把手47,把手47外端套有软套,把手47位于座板50顶部,训练时,患者的双手可以负载把手47上为其上身提供支撑。
52.以上实施例仅用以说明本发明而并非限制本发明所描述的技术方案,尽管本说明书参照上述的各个实施例对本发明已进行了详细的说明,但本发明不局限于上述具体实施方式,因此任何对本发明进行修改或等同替换;而一切不脱离发明的精神和范围的技术方案及其改进,其均涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。