技术特征:
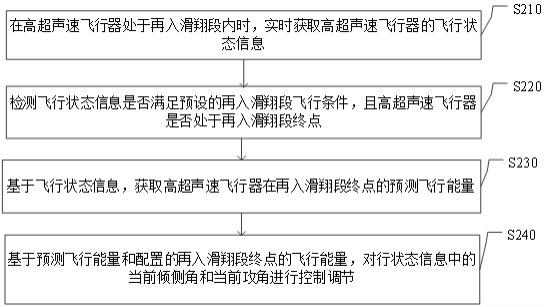
1.一种高超声速飞行器的能量管控再入制导方法,其特征在于,所述方法包括:在高超声速飞行器处于再入滑翔段内时,实时获取所述高超声速飞行器的飞行状态信息;在确定所述飞行状态信息满足预设的再入滑翔段飞行条件后,基于所述飞行状态信息,获取所述高超声速飞行器在再入滑翔段终点的预测飞行能量;若所述预测飞行能量不小于配置的所述再入滑翔段终点的预设飞行能量,则对飞行状态信息中的当前倾侧角和当前攻角进行第一控制调节,以控制所述高超声速飞行器在所述再入滑翔段内进行左右机动;若所述预测飞行能量小于配置的所述再入滑翔段终点的预设飞行能量,则对所述飞行状态信息中的当前倾侧角和当前攻角进行第二控制调节,以控制所述高超声速飞行器在所述再入滑翔段内以最优升阻比攻角及倾侧角为0的情况下运动,所述最优升阻比攻角为所述飞行状态信息中的飞行器升力和飞行器阻力达到最大比值时对应的攻角。2.如权利要求1所述的方法,其特征在于,所述预设的再入滑翔段飞行条件包括再入过程约束和伪平衡滑翔条件;其中,所述再入过程约束包括热流约束、过载约束和动压约束。3.如权利要求1所述的方法,其特征在于,对所述飞行状态信息中的当前倾侧角和当前攻角进行第二控制调节,包括:将所述当前倾侧角调节为零;获取所述再入滑翔段内滑翔过程中所述飞行状态信息中飞行器升力和飞行器阻力的最大升阻比值;将所述当前攻角调节为所述最大升阻比值对应的攻角。4.如权利要求1所述的方法,其特征在于,对飞行状态信息中的当前倾侧角和当前攻角进行第一控制调节,包括:基于配置的不同马赫数与不同攻角的映射关系,获取所述映射关系中所述高超声速飞行器的当前马赫数对应的目标攻角;并将所述当前攻角调节为所述目标攻角;基于预设的能量约束条件,对所述当前倾侧角的幅值进行调节;基于所述高超声速飞行器的视线角和所述飞行状态信息中的当前速度方位角的偏差,确定当前视线角误差;所述视线角为所述高超声速飞行器的当前位置与再入滑翔段终点位置的偏差角度;基于确定的当前视线角误差和配置的视线角误差限制范围,对所述当前倾侧角的符号进行调节,所述配置的视线角误差限制范围是基于伯努利混沌映射改进的灰狼优化算法确定的,所述配置的视线角误差限制范围用于控制所述高超声速飞行器的侧向方位。5.如权利要求4所述的方法,其特征在于,所述预设的能量约束条件表示为:
其中,为预测的满足再入滑翔段终点能量的射程,其是关于倾侧角ν变化的量,s为实际距离再入滑翔段终点的剩余射程,分别为预设的再入滑翔段终点时刻的经度和纬度,θ为速度倾角,为地球半径,ψ、λ分别为当前时刻的纬度和经度,d为飞行器阻力,r为所述高超声速飞行器质心相对于地球的地心距。6.如权利要求4所述的方法,其特征在于,所述配置的视线角误差限制范围表示为:其中,、分别表示侧向飞行方位误差的上下边界值,、表示视线角误差限制范围的常值,且满足,表示该误差限制范围小于预设范围时的飞行器转折速度,v0表示初始飞行器速度,v
end
表示再入滑翔段终点的飞行器速度。7.如权利要求6所述的方法,其特征在于,所述视线角误差限制范围的配置过程,包括:采用基于伯努利混沌映射算法,得到初始化的侧向飞行方位误差的上下边界值、所述视线角误差限制范围的常值和该误差限制范围小于预设范围时的飞行器转折速度;利用灰狼优化算法,对初始化的侧向飞行方位误差的上下边界值、所述常值和所述转折速度进行处理,获取所述视线角误差限制范围,所述视线角误差限制范围包括优化的侧向飞行方位误差的上下边界值、所述常值和所述飞行器转折速度。8.一种高超声速飞行器的能量管控再入制导装置,其特征在于,所述装置包括:获取单元,用于在高超声速飞行器处于再入滑翔段内时,实时获取所述高超声速飞行器的飞行状态信息;以及,在确定所述飞行状态信息满足预设的再入滑翔段飞行条件后,基于所述飞行状态信息,获取所述高超声速飞行器在再入滑翔段终点的预测飞行能量;
控制调节单元,用于若所述预测飞行能量不小于配置的所述再入滑翔段终点的飞行能量,则对飞行状态信息中的当前倾侧角和当前攻角进行第一控制调节,以控制所述高超声速飞行器在所述再入滑翔段内进行左右机动;以及,若所述预测飞行能量小于配置的所述再入滑翔段终点的飞行能量,则对所述飞行状态信息中的当前倾侧角和当前攻角进行第二控制调节,以控制所述高超声速飞行器在所述再入滑翔段内以最优升阻比攻角及倾侧角为0的情况下运动,所述最优升阻比攻角为所述飞行状态信息中的飞行器升力和飞行器阻力达到最大比值时对应的攻角。9.一种电子设备,其特征在于,所述电子设备包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;存储器,用于存放计算机程序;处理器,用于执行存储器上所存储的程序时,实现权利要求1-7任一所述的方法步骤。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-7任一所述的方法步骤。
技术总结
本申请提供一种高超声速飞行器的能量管控再入制导方法及装置,该方法在高超声速飞行器处于再入滑翔段内时,实时获取其飞行状态信息;在确定飞行状态信息满足预设的再入滑翔段飞行条件后,获取高超声速飞行器在再入滑翔段终点的预测飞行能量;基于预测飞行能量与配置的所述再入滑翔段终点的预设飞行能量,对飞行状态信息中的当前倾侧角和当前攻角进行控制调节,以控制高超声速飞行器在所述再入滑翔段内进行左右机动或控制高超声速飞行器在所述再入滑翔段内以最优升阻比攻角及倾侧角为0的情况下运动。该方法提高了超声速飞行器的落点精度。精度。精度。
技术研发人员:宋佳 童心迪 徐小蔚 赵凯 于景威
受保护的技术使用者:北京航空航天大学
技术研发日:2022.12.05
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。