1.本发明涉及机器人技术领域,具体是一种运动冗余球面并联机构。
背景技术:
2.球面并联机构是并联机构中的一个重要分支,该类型机构动平台运动特征在于动平台只能绕某一固定点转动;由于球面并联机构具有在体积和输入相同情况下动平台运动范围大于其他并联机构、运动计算简单和控制较为容易等优点,且其动平台具有绕定点转动的三个转动运动,因此在机器人腰、腕、肩、髋等关节、卫星天线方向跟踪、灵巧眼等多个方向有广泛应用。
3.最典型的三转动运动球面并联机构为灵巧眼,其特征在于连接在机架与动平台之间的三条分支均为三个转动副,且这九个转动副均交于一点,这种独特结构约束使得动平台只能绕固定点做圆周运动。该机构的优点在于惯量小、角速度大可以实现快速精准定位,但是这种单一布置很容易产生奇异,因此提出一种能扩大工作空间、增强其避免奇异能力、速度快、定位精准等优点的运动冗余球面并联机构很有必要。
技术实现要素:
4.本发明所要解决的技术问题是克服上述背景技术的不足,提出一种运动冗余球面并联机构,该机构具有工作空间大、避免奇异、避免机械干扰能力好、速度快等优点。
5.本发明提供的技术方案是:
6.一种运动冗余球面并联机构,其特征在于:该并联机构包括机架(1)、动平台以及并联连接在机架与动平台之间的两条第一分支和一条第二分支;
7.所述第一分支包括依次连接在机架与动平台之间的第一转动副、第一弧形连杆、第二转动副、第二弧形连杆以及第三转动副;所述第二分支依次包括连接在机架与动平台之间的第四转动副、第三弧形连杆、第五转动副、第四弧形连杆、第六转动副、第五弧形连杆以及第七转动副。
8.所有转动副轴线都交于一固定点,同一弧形连杆两端转动副的轴线处于同一平面。
9.所述并联机构的驱动副为两条第一分支的第一转动副,以及第二分支的第四转动副、第五转动副;各驱动副由若干伺服电机分别一一直接驱动。
10.本发明的有益效果是:本发明提出的并联机构动平台可以实现空间的定点三转动运动,该机构具有工作空间大、避免奇异能力好、速度快等优点。
附图说明
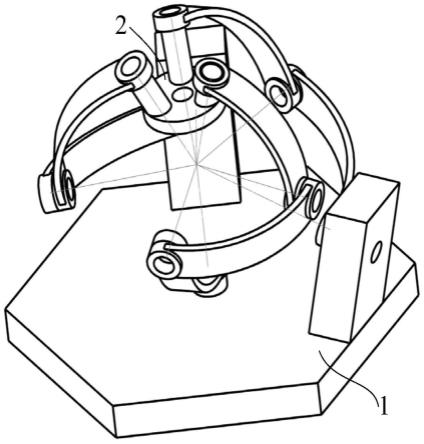
11.图1是本发明的立体结构示意图。
12.图2是实施例子中第一分支的立体结构示意图。
13.图3是实施例子中第二分支的立体结构示意图。
具体实施方式
14.以下结合附图所示的实施例对本发明作进一步说明。
15.附图所示的运动冗余并联机构,包括机架(1)、动平台(2)以及并联连接于机架与动平台之间的两条第一分支和一条第二分支;
16.所述第一分支包括依次连接在机架与动平台之间的第一转动副(3)、第一弧形连杆(4)、第二转动副(5)、第二弧形连杆(6)以及第三转动副(7);所述第二个分支包括依次连接在机架与动平台之间的第四转动副(8)、第三弧形连杆(9)、第五转动副(10)、第四弧形连杆(11)、第六转动副(12)、第五弧形连杆(13)以及第七转动副(14);
17.所述所有转动副轴线都交于一固定点,同一弧形连杆两端转动轴轴线在同一平面内。
18.本实施例中,并联机构的驱动副为两条第一分支的第一转动副,以及第二分支的第四转动副(8)、第五转动副(10);驱动方式可选用伺服电机,每个驱动副配设一对应的伺服电机;各伺服电机分别对相对应的驱动副进行驱动和控制,动平台(2)就能输出绕固定点的三转动运动。
技术特征:
1.一种运动冗余球面并联机构,其特征在于:该并联机构包括机架(1)、动平台(2)以及并联连接在机架与动平台之间的两条第一分支和一条第二分支;所述第一分支包括依次连接在机架与动平台之间的第一转动副(3)、第一弧形连杆(4)、第二转动副(5)、第二弧形连杆(6)以及第三转动副(7);所述第二个分支包括依次连接在机架与动平台之间的第四转动副(8)、第三弧形连杆(9)、第五转动副(10)、第四弧形连杆(11)、第六转动副(12)、第五弧形连杆(13)以及第七转动副(14);所有转动副的轴线都交于一固定点,同一弧形连杆两端转动副的轴线处于同一平面。2.根据权利要求1所述的运动冗余球面并联机构,其特征在于:所述并联机构的驱动副为两条第一分支的第一转动副,以及第二分支的第四转动副、第五转动副,各驱动副由若干伺服电机分别一一直接驱动。
技术总结
本发明涉及机器人技术领域。目的是提供一种运动冗余球面并联机构,该机构具有工作空间大、避免奇异、避免机械干扰能力好、速度快等优点。技术方案是一种运动冗余球面并联机构,其特征在于:该并联机构包括机架(1)、动平台以及并联连接在机架与动平台之间的两条第一分支和一条第二分支;所述第一分支包括依次连接在机架与动平台之间的第一转动副、第一弧形连杆、第二转动副、第二弧形连杆以及第三转动副;所述第二分支依次包括连接在机架与动平台之间的第四转动副、第三弧形连杆、第五转动副、第四弧形连杆、第六转动副、第五弧形连杆以及第七转动副。七转动副。七转动副。
技术研发人员:叶伟 蔡宇龙 郑义
受保护的技术使用者:浙江理工大学
技术研发日:2022.10.24
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。