1.本发明涉及一种可以弯曲运动的蛇形机器人,尤其涉及一种利用电机驱动麦克纳姆轮进行运动的蛇形机器人。
背景技术:
2.机器人被广泛应用于工业制造、医疗健康、快递运输等各个行业。随着人工智能技术的不断提升和完善,机器人正在代替人工完成各种高风险、高疲劳的工作。
3.蛇形机器人是一种可以模仿生物蛇运动的仿生机器人,是一种具有多关节的机器人。因为这种机器人可以在复杂、狭小的空间内工作,可以被应用于搜救、探测及军事等领域,被广泛关注。随着人工智能技术的提升,蛇形机器人可以完成越来越多的任务,并被应用于火星表面探测等太空领域。
4.一种被广泛使用的蛇形机器人结构(例如专利申请号: cn202210646089.3)是利用垂直和水平方向正交的关节来模拟蛇类等生物的柔软身体,每两个正交的关节组成一个单元体,每个单元体相当于一个万向节,具有两个方向的自由度。由多个单元体组成蛇形机器人使得机器人具有向任何方向运动的能力,但是这种蛇形机器人需要侧轮来驱动机器人的运动,而侧轮限制了蛇形机器人运动的自由度,因此这种蛇形机器人不具备翻滚的能力,同时由于需要多个关节协同工作才能完成一个多自由度运动,因此该类蛇形机器人不能适应复杂的环境。
5.另外一种蛇形机器人(例如专利申请号:cn202210520499.3)利用驱动机对钢丝绳进行收放来进行对机器人进行控制,由于这种蛇形机器人由驱动机提供动力和控制,因此驱动机体积庞大并且复杂,机器人无法脱离驱动机工作,因此该蛇形机器人只能被限制在有限的空间内工作。
6.综上所述,蛇形机器人具有广泛的应用场景,可以在复杂险恶的环境下工作,但是目前的蛇形机器人具有不同的缺陷,例如不能多维度运动、行进速度慢、不能有效控制等,使得目前蛇形机器人还没有被广泛使用。
技术实现要素:
7.技术问题
8.本发明的目的是提供一种可以在复杂环境下工作的蛇形机器人,这种机器人可以进行多维度蜿蜒运动,并且可以进行例如翻滚等复杂动作。
9.技术方案
10.本发明提供的一种蛇形机器人,利用电机驱动麦克纳姆轮进行运动,所述蛇形机器人包括:头部,所述头部包括摄像头;身部,所述身部包括若干个头尾相连的驱动模块,所述驱动模块包括推进体、关节,所述推进体包括麦克纳姆轮、支架、电机、齿轮,所述齿轮有通孔,所述齿轮固定在所述
麦克纳姆轮的轮毂内侧,所述麦克纳姆轮的轮毂有圆孔,所述齿轮的轴线以及所述麦克纳姆轮轮毂圆孔的中心线和所述麦克纳姆轮的旋转轴线重合,所述支架包括圆管,所述麦克纳姆轮通过所述麦克纳姆轮轮毂的圆孔转动固定在所述支架的圆管上,所述电机固定在所述支架上,所述电机的转动轴上有齿轮,所述电机齿轮和所述麦克纳姆轮的齿轮相互啮合,所述电机带动所述麦克纳姆轮旋转,所述推进体通过所述支架圆管和所述关节固定连接,所述头部和所述身部相连接;线路板,所述线路板包括数据接口、电机驱动线路,所述头部摄像头通过数据线和所述线路板相连,所述电机通过导线和所述线路板相连接,线路板的电机驱动线路驱动电机转动,电机通过电机齿轮和麦克纳姆轮的齿轮驱动麦克纳姆轮转动,从而驱动蛇形机器人运动;电源,所述电源通过导线和所述线路板相连,电源可以是外接电源或者布置在蛇形机器人内部的电池。
11.进一步地,所述驱动模块的关节包括上底板、下底板、连接杆、球缺、三个电机、三条缆线、外壳,所述球缺的底面固定在所述连接杆的一端,所述上底板或下底板有凹槽,所述球缺滚动固定在所述上底板或者下底板的凹槽内,所述连接杆没有球缺的一端固定在所述下底板或者上底板上,所述三个电机固定在所述下底板上,所述三条缆线的一端分别固定在所述上底板上,所述三条缆线的另一端分别和所述三个电机的转动轴连接,所述三个电机和所述线路板通过导线连接,所述外壳呈圆筒形,所述外壳的两个底面分别和所述下底板及上底板固定,所述外壳可变形,所述推进体通过所述关节上底板或下底板和所述关节连接,所述三个电机通过导线和所述线路板相连,线路板控制三个电机旋转的方向和圈数,从而控制三条缆线的拉伸长度,而三条缆线的另一端固定在上底板或下底板上,改变三条缆线拉伸长度就会改变上底板相对下底板的倾斜角度及方向,从而控制蛇形机器人的形态。
12.所述推进体包括齿轮轴、减速齿轮,所述齿轮轴固定在所述推进体支架上,所述减速齿轮包括两个齿轮,两个齿轮相互固定,所述减速齿轮转动固定在所述齿轮轴上,所述两个齿轮中的一个齿轮和所述麦克纳姆轮齿轮啮合,所述两个齿轮的另外一个齿轮和所述电机齿轮啮合,电机通过电机齿轮、减速齿轮、麦克纳姆轮的齿轮带动麦克纳姆轮旋转。
13.所述麦克纳姆轮包括第二轮毂,所述支架包括第二圆管,所述第二轮毂有圆孔,所述第二轮毂圆孔的中心线和所述麦克纳姆轮的旋转轴线重合,所述麦克纳姆轮转动固定在所述支架第二圆管上。
14.所述相邻推进模块的麦克纳姆轮行星轮转动轴方向不同,如果一个所述推进体的麦克纳姆轮是左轮,它相邻所述推进体的麦克纳姆轮是右轮;如果一个所述推进体的麦克纳姆轮是右轮,它相邻所述推进体的麦克纳姆轮就是左轮。
15.所述推进体包括轴承,所述轴承的外圈固定在所述麦克纳姆轮轮毂的圆孔内,所述支架圆管穿过所述轴承内圈并和所述轴承的内圈固定。通过放置轴承,降低噪音。
16.所述关节包括三个齿轮轴、三个齿轮,所述三个齿轮轴固定在所述关节下底板上,所述三个齿轮转动固定在所述三个齿轮轴上,所述三个电机的转动轴有齿轮,所述三个齿轮和所述三个电机齿轮相啮合,所述三条缆线的一端和所述三个齿轮的转动轴相连接。
17.所述头部包括电机、钻头,所述电机带动所述钻头旋转,所述电机通过导线和所述
线路板相连。
18.所述头部包括灯,所述灯和所述线路板通过导线相连接。
19.所述头部还包括话筒,所述话筒和所述线路板相连。
附图说明
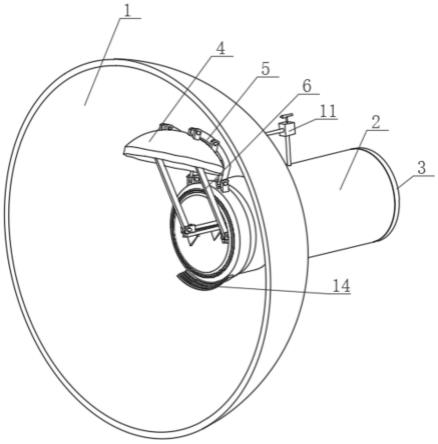
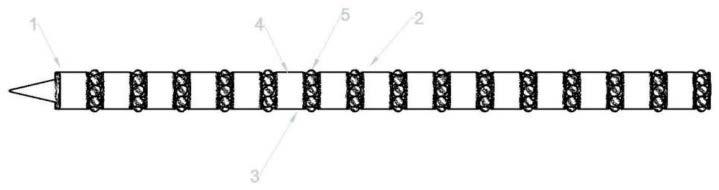
20.图1为本发明实施例提供的蛇形机器人结构示意图。
21.图2为本发明实施例提供的蛇形机器人驱动模块结构示意图。
22.图3为本发明实施例提供的蛇形机器人麦克纳姆轮结构示意图。
23.图4为本发明实施例提供的蛇形机器人推进体结构示意图。
24.图5为本发明实施例提供的蛇形机器人推进体结构示意图。
25.图6为本发明实施例提供的蛇形机器人关节结构示意图。
26.图7为本发明实施例提供的蛇形机器人关节结构示意图。
27.图8为本发明实施例提供的蛇形机器人关节结构示意图。
28.图9为本发明实施例提供的蛇形机器人头部结构示意图。
具体实施方式
29.下面结合附图,通过对本发明的具体实施方式详细描述,将使本发明的技术方案及其他有益效果显而易见。可以理解,附图仅提供参考与说明用,并非用来对本发明加以限制。
30.参考图1、图2、图3、图4、图5、图9,本发明提供的一种蛇形机器人,利用电机驱动麦克纳姆轮进行运动,所述蛇形机器人包括:头部1,所述头部1包括摄像头194;身部2,所述身部2包括若干个头尾相连的驱动模块3,所述驱动模块 3包括推进体5、关节4,所述推进体5包括麦克纳姆轮51、支架53、电机54、齿轮52,所述齿轮52有通孔,所述齿轮52固定在所述麦克纳姆轮51的轮毂511内侧,所述麦克纳姆轮51的轮毂511有圆孔,所述齿轮 52的轴线以及所述麦克纳姆轮轮毂511圆孔的中心线和所述麦克纳姆轮 51的旋转轴线重合,所述支架53包括圆管55,所述麦克纳姆轮51通过所述麦克纳姆轮轮毂511的圆孔转动固定在所述支架的圆管55上,所述电机54固定在所述支架53上,所述电机54的转动轴上有齿轮541,所述电机齿轮541和所述麦克纳姆轮的齿轮52相互啮合,所述电机54带动所述麦克纳姆轮51旋转,所述推进体5通过所述支架圆管55和所述关节 4固定连接,所述头部1和所述身部2相连接;线路板,所述线路板包括数据接口、电机驱动线路,所述头部1摄像头通过数据线和所述线路板相连,所述电机54通过导线和所述线路板相连接,线路板的电机驱动线路驱动电机54转动,电机54通过电机齿轮 541和麦克纳姆轮的齿轮52驱动所述麦克纳姆轮51转动,从而驱动蛇形机器人运动;电源,所述电源通过导线和所述线路板相连,电源可以是外接电源或者布置在蛇形机器人内部的电池。
31.参考图6、图7、图8,进一步地,所述驱动模块3的关节4包括上底板12、下底板11、连接杆13、球缺16、三个电机(111、112、 113)、三条缆线(211、212、213)、线路板15,所述球缺
16的底面固定在所述连接杆13的一端,所述上底板12或下底板11有凹槽17,所述球缺16滚动固定在所述上底板12或者下底板11的凹槽17内,所述连接杆13没有球缺的一端固定在所述下底板11或者上底板12上,所述三个电机(111、112、113)固定在所述下底板11上,所述三条缆线(211、 212、213)的一端分别固定在所述上底板12上,所述三条缆线(211、 212、213)的另一端分别绕在所述三个电机(111、112、113)的转动轴上,所述三个电机(111、112、113)通过导线和所述线路板相连。线路板控制三个电机(111、112、113)旋转的方向和圈数,从而控制三条缆线(211、212、213)的拉伸长度,而三条缆线(211、212、213)的另一端固定在上底板12或下底板11上,改变三条缆线(211、212、213)拉伸长度就会改变上底板12相对下底板11的倾斜角度及方向,从而控制蛇形机器人的形态。
32.参考图4,所述推进体5包括齿轮轴58、减速齿轮56,所述齿轮轴58固定在所述推进体支架53上,所述减速齿轮56包括两个齿轮 (561、562),两个齿轮(561、562)相互固定,所述减速齿轮56转动固定在所述齿轮轴58上,所述齿轮561和所述麦克纳姆轮齿轮52啮合,所述齿轮562和所述电机齿轮541啮合,电机54通过电机齿轮541、减速齿轮56、麦克纳姆轮的齿轮52带动麦克纳姆轮旋转。
33.参考图2、图4,所述麦克纳姆轮包括第二轮毂512,所述支架 53包括第二圆管57,所述第二轮毂512有圆孔,所述第二轮毂512圆孔的中心线和所述麦克纳姆轮51的旋转轴线重合,所述麦克纳姆轮51通过轮毂512转动固定在所述支架第二圆管57上。
34.参考图1,所述相邻驱动模块3的麦克纳姆轮51行星轮转动轴方向不同,如果一个所述推进体5的麦克纳姆轮51是左轮,它相邻推进体5的麦克纳姆轮51是右轮;如果一个所述推进体5的麦克纳姆轮51是右轮,它相邻推进体5的麦克纳姆轮51就是左轮。
35.参考图3,所述推进体5包括轴承,所述轴承的外圈固定在所述麦克纳姆轮轮毂511的圆孔内,所述支架圆管55穿过所述轴承内圈并和所述轴承的内圈固定。通过放置轴承,降低噪音。
36.参考图6、图7,所述关节4还包括三个轴和三个齿轮(411、 412、413),所述三个轴固定在所述下底板11上,所述齿轮(411、 412、413)转动固定在所述三个轴上,所述三个电机的转动轴安装有齿轮 (121、122、123),所述下底板上齿轮(411、412、413)和三个电机齿轮(121、122、123)分别啮合,所述三条缆线(211、212、213)分别绕在所述齿轮(411、412、413)的转动轴上。通过调整下底板11上三个齿轮(411、412、413)的齿数及三个电机齿轮(121、122、123)的齿数,达到对三个电机(111、1112、113)进行减速的作用,同时避免上底板12 在外力的作用下改变其相对下底板11的角度和方向。
37.参考图9,所述头部包括电机191、钻头192,所述电机191带动所述钻头192旋转,所述电机191通过导线和所述线路板相连。
38.参考图9,所述头部包括灯193,所述灯193和所述线路板通过导线相连接。
39.参考图9,所述头部还包括话筒195,所述话筒195和所述线路板相连。
40.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。